(Л
с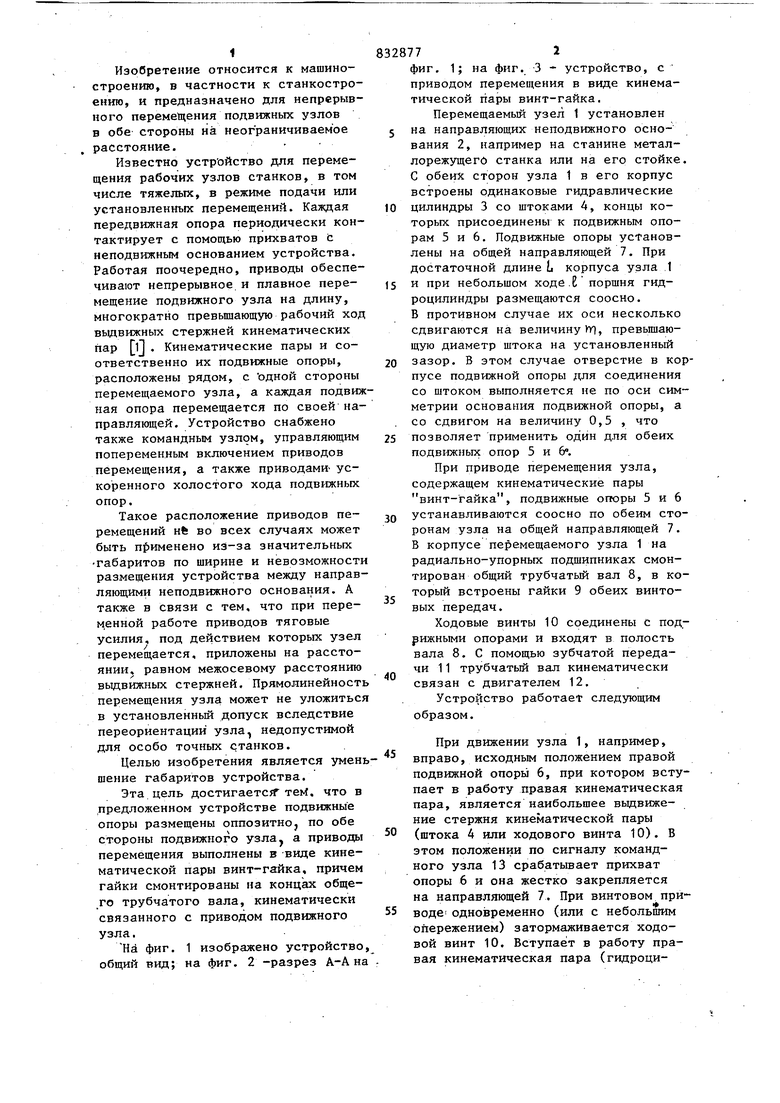
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения подвижного узла | 1979 |
|
SU832878A2 |
| Устройство для перемещения подвижного узла | 1976 |
|
SU729029A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| РЕГУЛИРУЕМЫЙ ТЕЛЕСКОПИЧЕСКИЙ МЕХАНИЗМ | 2006 |
|
RU2328629C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ БЛОКОВ КАМНЯ | 1996 |
|
RU2097182C1 |
| УСТРОЙСТВО ДЛЯ ПЛЮЩЕНИЯ ЗУБЬЕВ ПИЛ | 1990 |
|
RU2036056C1 |
| Многорезцовая державка | 1981 |
|
SU1007846A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Стенд-кантователь | 1987 |
|
SU1412930A1 |
| РЕГУЛЯТОР РАСХОДА РАБОЧЕЙ СРЕДЫ ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2409828C2 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО УЗЛА по авт. св.""'"''=*w№ 729029, отличающееся тем, что, с целью уменьшения габаритов устройства, подвижные опоры размещены оппозитно, по обе стороны подвижного узлаь2. Устройство по п. 1, отличающееся тем, что приводы перемещения выполнены в виде кинематической пары винтгайка, причем . гайки смонтированы на концах введенного ' в устройство общего трубчатого вала, кинематически связанного с приводом.
00
00 to
00 vl
1
Изобретение относится к машиностроению, в частности к станкостроению, и предназначено для непрерывного переме1дения подвижных узлов в обе стороны на неограничиваемое расстояние.
Известно устройство для перемещения рабочих узлов станков, в том числе тяжелых, в режиме подачи или установленных перемещений. Каждая передвижная опора периодически контактирует с помощью прихватов с неподвижным основанием устройства. Работая поочередно, приводы обеспечивают непрерывное и плавное перемещение подвижного узла на длину, многократно превышающую рабочий ход вьщвижных стержней кинематических пар Л . Кинематические пары и соответственно их подвижные опоры, расположены рядом, с одной стороны перемещаемого узла, а каждая подвижная опора перемещается по своей направляющей. Устройство снабжено также командным узлом, управляющим попеременным включением приводов перемещения, а также приводами ускоренного холостого хода подвижных опор.
Такое расположение приводов перемещений Hfe во всех случаях может быть п 1именено из-за значительных габаритов по ширине и невозможности размещения устройства между направляющими неподвижного основания. А также в связи с тем, что при переменной работе приводов тяговые усилия, под действием которых узел перемещается, приложены на расстоянии, равном межосевому расстоянию вьщвижных стержней. Прямолинейность перемещения узла может не уложиться в установленный допуск вследствие переориентации узла, недопустимой для особо точных станков.
Целью изобретения является уменьшение габаритов устройства.
Эта цель достигаетс Г тем. что в предложенном устройстве подвижные опоры размещены оппозитно, по обе стороны подвижного узла а приводы перемещения выполнены в виде кинематической пары винт-гайка, причем гайки смонтированы на концах обще.го трубчатого вала, кинематически связанного с приводом подвижного узла.
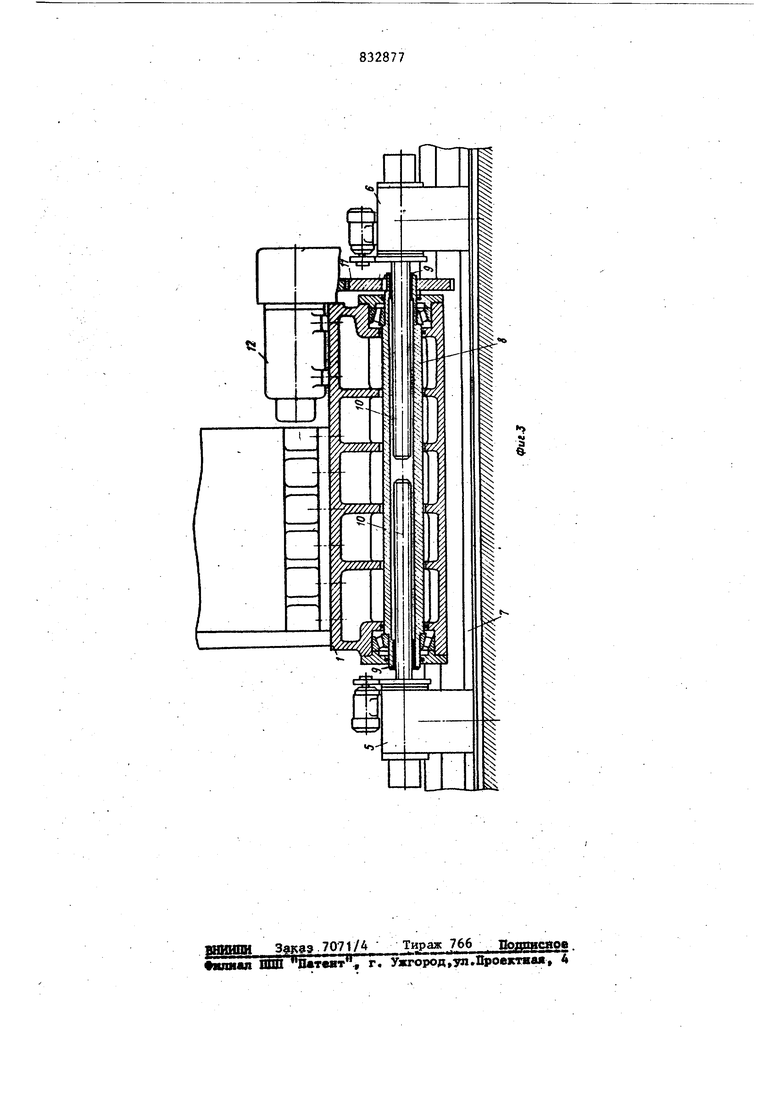
На фиг. 1 изображено устройство общий вид; на фиг. 2 -разрез А-А на
328771
фиг. 1; на фиг. 3 - устройство, с приводом перемещения в виде кинематической пары винт-гайка.
Перемещаемый узел 1 установлен 5 на направляющих неподвижного основания 2, например на станине металлорежущего станка или на его стойке. С обеих сторон узла 1 в его корпус встроены одинаковые гидравлические
10 цилиндры 3 со штоками 4, концы которых присоединены к подвижным опорам 5 и 6. Подвижные опоры установлены на общей направляющей 7. При достаточной длине L корпуса узла 1
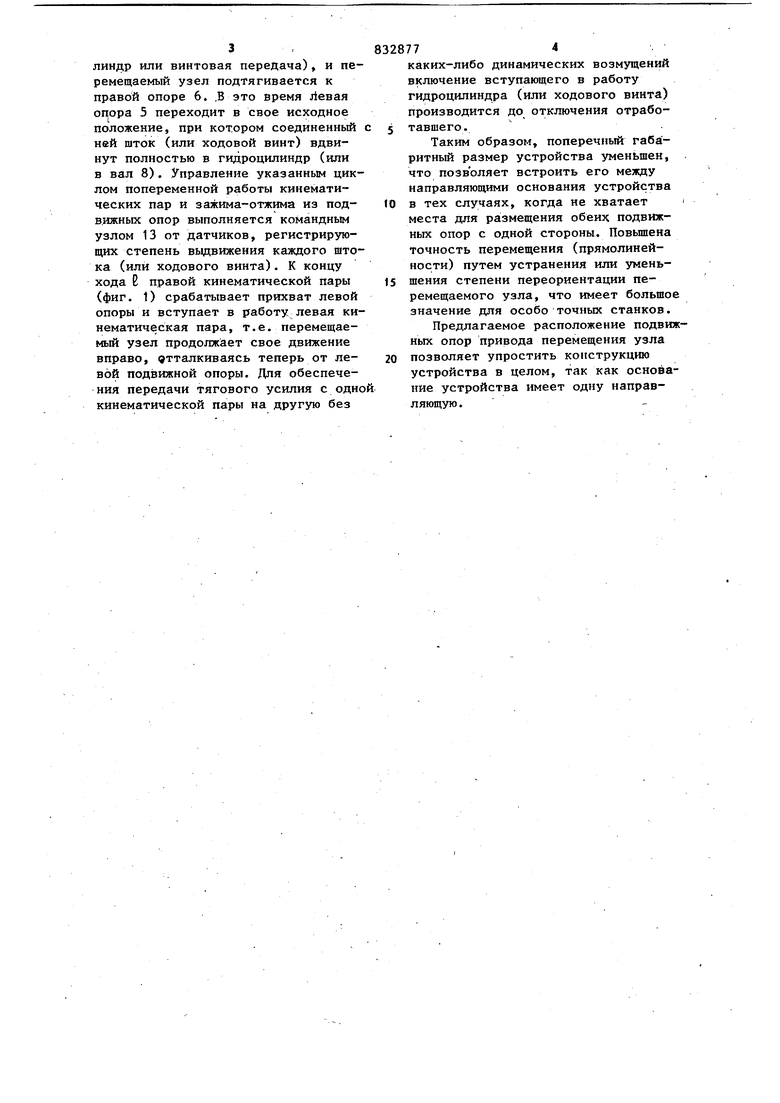
15 и при небольшом ходе.Е поршня гидроцилиндры размещаются соосно. В противном случае их оси несколько сдвигаются на величину vv), иревьтающую диаметр штока на установленный
20 зазор. В этом случае отверстие в корпусе подвижной опоры для соединения со штоком выполняется не по оси симметрии основания подвижной опоры, а со сдвигом на величину 0,5 , что
5 позволяет применить один для обеих подвижных опор 5 и 6°.
При приводе перемещения узла, содержащем кинематические пары винт-гайка, подвижные огюры 5 и 6
Q устанавливаются соосно по обеим сторонам узла на общей направляющей 7. В корпусе перемещаемого узла 1 на радиально-упорнык подшипниках смонтирован общий трубчатый вал В, в который встроены гайки 9 обеих винтовых передач.
Ходовые винты 10 соединены с подрижными опорами и входят в полость вала 8. С помощью зубчатой передачи 11 трубчатый вал кинематически связан с двигателем 12.
Устройство работает следующим образом.
При движении узла 1, например, вправо, исходным положением правой подвижной опоры 6, при котором вступает в работу правая кинематическая пара, является наибольшее вьщвижение стержня кинематической пары 0 (штока 4 или ходового винта 10). В этом положении по сигналу командного узла 13 срабатывает прихват опоры 6 и она жестко закрепляется на направляющей 7. При винтовом при 5 воде одновременно (или с небольшим опережением) затормаживается ходовой винт 10. Вступае;т в работу правая кинематическая пара (гидроцилиндр или винтовая передача), и перемещаемый узел подтягивается к правой опоре 6. .В это время Левая опора 5 переходит в свое исходное положение, при котором соединенньй ней шток (или ходовой винт) вдвинут полностью в гидроцилиндр (или в вал 8). Управление указанным циклом попеременной работы кинематических пар и зажима-отжима из подвижных опор выполняется командным узлом 13 от датчиков, регистрирующих степень выдвижения каждого штока (или ходового винта). К концу хода В правой кинематической пары (фиг. 1) срабатывает прихват левой опоры и вступает в работу левая кинематическая пара, т.е. перемещаемый узел продолжает свое движение вправо, отталкиваясь теперь от левой подвижной опоры. Для обеспечения передачи тягового усилия с одно кинематической пары на другую без
328774
каких-либо динамических возмущений включение вступающего в работу гидроцилиндра (или ходового винта) производится до отключения отработавшего.
Таким образом, поперечный габаритный размер устройства уменьшен, что позволяет встроить его между направляющими основания устройства
10 в тех случаях, когда не хватает места для ра змещения обеих подвижных опор с одной стороны. Повьщгена точность перемещения (прямолинейности) путем устранения или уменьшения степени переориентации перемещаемого узла, что имеет большое значение для особо точных станков.
Предлагаемое расположение подвижных опор привода перемещения узла
20 позволяет упростить конструкцию
устройства в целом, так как основание устройства имеет одну направляющую.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ОКРОШКА СБОРНАЯ МЯСНАЯ" | 2007 |
|
RU2342001C1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
