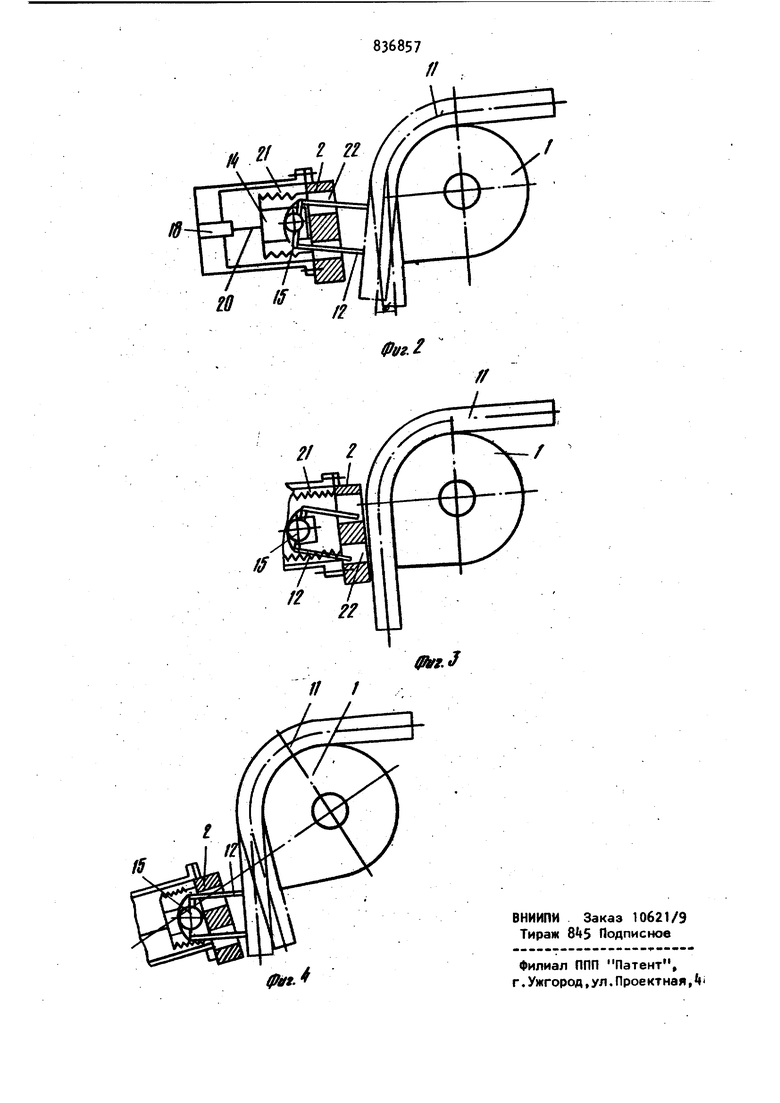
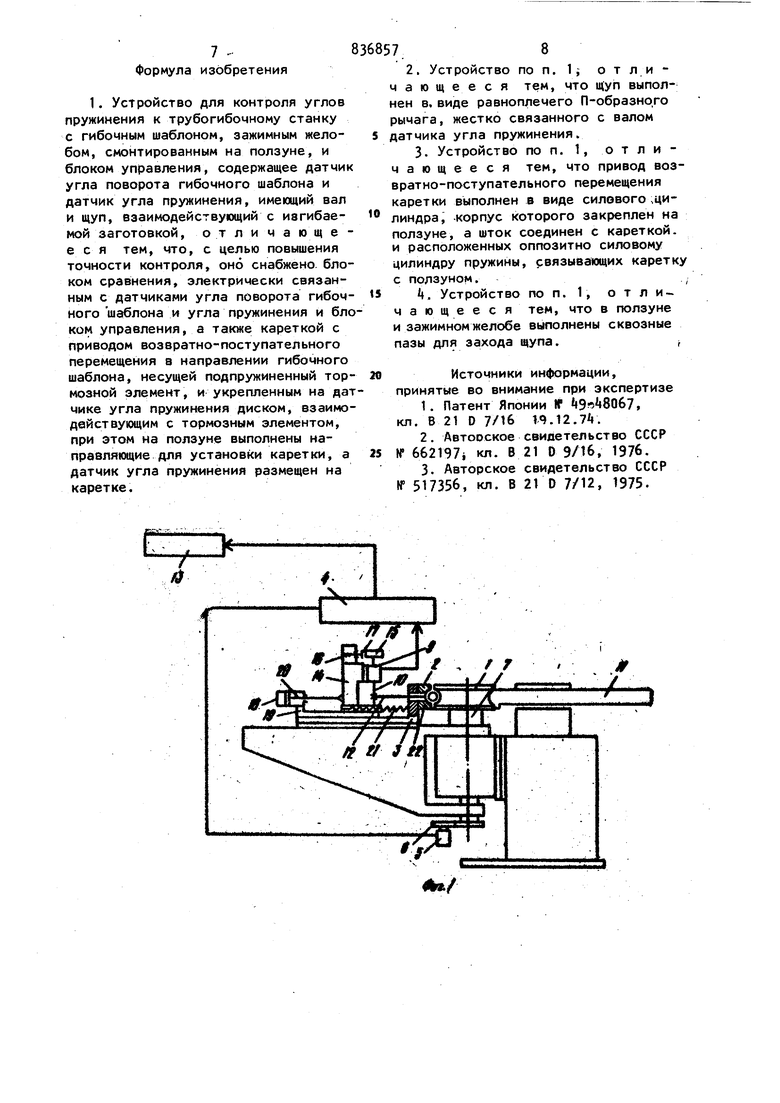
(Б) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УГЛОВ ПРУЖИНЕНИЯ К ТРУБОГИБОЧНОМУ СТАНКУ станку с гибочным шаблоном, зажимным желобом, смонтированным на ползуне и блоком управления, содержащее датчик угла поворота, гибочного шаблона и датчик угла пружинения, имеющий вал и щуп, взаимодействующий с изгибаемой заготовкой СЗ . Однако это устройство также не обеспечивает высокой точности гибки труб на трубогибочном станке, так как на сигнал, передаваемый сельсину датчику от датчика углов пружинения накладываются ошибки, -связанные со значительными разбросами во времени срабатывания пускового аппарата, нелинейностью характеристик резистора и скачкообразности их изменения, инертностью реверсивного электродвигателя. Кроме того, известное устрой ство не обеспечивает высокой точноети замера углов пружинения при после довательных догибках трубы на угол пружинения, поскольку точка контакта щупа датчика углов пружинения с поверхностью трубы в положении, соответствующем началу отсчета углов пру жинения, при последующих догибках трубы, смещается относительно щупа по дугообразной траектории, что не согласуется с прямолинейными перемещениями щупа. При этом вносится ошиб ка в величину хода щупа датчика углов пружинения,а значит,и в сигнал, передаваемый сельсину-датчику. Все это снижает точность гибки труб. Цель изобретения - повышение точности контроля. Цель достигается тем, что известное устройство для контроля углов пружинения к трубогибочному станку с гибочным шаблоном, зажимным желобом, смонтированным на ползуне и бло ком управления, содержащее датчик уг ла поворота гибочного шаблона и датчик угла пружинения, имеющий вал и щуп, взаимодействующий с изгибаемой заготовкой, снабжено блоком сравнения, электрически связанным с датчиками угла поворота гибочного шаблона и угла пружинения и блоком управления, а также кареткой с приводом возвратно-поступательного перемещения в направлении гибочного шаблона, несущей подпружиненный тормозной эле мент, и укрепленным на датчике угла пружинения диском,, взаимодействующим с тормозным элементом, при этом на ползуне выполнены направляющие для установки каретки, а датчик угла пружинения размещен на каретке, а также тем, что щуп выполнен в виде равноплечего П-образного рычага, жестко связанного с валом датчика угла пружинения, привод возвратно-поступательного перемещения каретки выполнен в виде силового цилиндра, корпус которого закреплен на ползуне, а шток соединен с кареткой, и расположенных оппозитно силовому цилиндру пружин, связывающих каретку с ползуном, кроме того, в ползуне и зажимном желобе выполнены сквозные пазы для захода щупа. На фиг. 1 схематично изображено устройство для контроля углое пружинения к трубогибочному станку, общий вид; на фиг. 2 - устройство в момент контроля угла пружинения трубы в положении, соответствующем началу отсчета углов пружинения, вид сверху; на фиг. 3 - устройство для контроля углов пружинения трубы в момент ее поджима зажимным желобом к гибочному шаблону, вид сверху; на фиг. - устройство в момент контроля трубы после ее догибки на угол пружинения, вид сверху. Устройство для контроля углов пружинения к трубогибочной машине с гибочным шаблоном 1 и зажимным желобом 2, смонтированным на ползуне 3, жестко связанным с указанным желобом 2, содержит датчик угла поворота гибочного шаблона 1, датчик углов пружинения, блок k сравнения. Датчик угла поворота гибочного шаблона выполнен в виде сельсина 5, вал которого кинематически связан при помощи зубчатой передачи 6 .с валом 7, несущим закрепленный на нем гибочный шаблон 1. Датчик углов пружинения выполнен в виде сельсина 9. На валу 10 сельсина 9 закреплен взаимодействующий с трубой 11 щуп 12, выполненный в виде равноплечего П-образного рычага. Сельсины 5 и 9 электрически связаны с блоком k сравнения, который подсоединен к блоку 13 управления станком. Блок служит для сравнения сигналов, поступающих с сельсинов 5 и 9, и содержит устройство для масштабного преобразования угла поворота гибочного шаблона 1 пропорционально углу пружинения заготовки (не показано). Устройство для контроля углов пружинения содержи также каретку 1, установленную в направляющих ползуна 3 с возможностью возвратнопоступательного перемещения в направ лении гибочного шаблона 1. Корпус сельсина 9 жестко связан с кареткой , причем щуп 12, жестко связанный с валом 10 сельсина 9, подторможен к каретке It при помощи диска 15, закрепленного на валу 10 и подпружинен ного при помощи пружины 16 тормозного элемента в виде тормозной колодки 17, смонтированной на каретке 1. Привод возвратно-поступательного перемещения каретки в направление гибочного шаблона 1 выполнен в виде силового цилиндра, корпус 18 которого закреплен на выступе 19 ползуна 3, а шток 20 шарнирно соединен с кареткой 1, и пружин 21 растяжения, связывающих каретку I с ползуном 3Для прохода щупа 12 к изгибаемой заготовке в ползуне 3 и зажимном желобе 2 предусмотрены проемы 22. Устройство для контроля углов пружинения работает следующим образом. После установки трубы 11 в рабоче зоне трубогибочного станка по команде от блока 13 управления станком производится прижим заготовки к гибочному шаблону 1 при помощи зажимно го желоба 2, жестко связанного с ползуном 3, несущим каретку И с закрепленным на ней датчиком угла пружинения в виде сельсина 9 со щупом 12 Щуп 12 в это время находится внутри проемов 22 и удерживается в этом положении при помощи силового цилинд ра 18. После зажима трубы 11 по команде от блока 13 управления станком производится гибка заготовки на запро граммированный угол, который контролируется при помощи дополнительного сельсина-датчика, кинематически связанного с валом 7 (не показан). Затем производится отвод ползуна 3 с закрепленным на нем зажимным желобом 2 от трубы 11, причем последняя под действием сил упругой деформации отходит от гибочного шаблона 1 на угол пружинения. По команде от блока 13 прекращается подача рабочего тела в силовой цилиндр 18, в результате чего каретка 1й под деист вием пружин 21 перемещается в сторону гибочного шаблона 1, при этом щуп 12 выходит из проемов 22 и, взаимодействуя с поверхностью трубы П, поворачивает вал 10 сельсина 9на угол пружинения трубы. После этого рабочее тело вновь подается в силовой цилиндр 18, который приводит в движение каретку 1, отводя,ее и щуп 12 от трубы, при этом щуп 12 входит в проемы 22 и остается в них повернутым на угол пружинения заготовки за счет сил трения между диском 15 и тормозной колодкой 17. Сигналы от сельсинов 9 и 5 поступают в блок 4 сравнения. Поскольку между сельсинами 9 и 5 на данном этапе контроля угла пружинения имеется рассогласование фаз, то вновь по команде от блока 13 управления приводится в движение ползун 3 с зажимным желобом 2 в направлении гибочного шаблона 1, в результате чего производится зажим заготовки, а затем ее догибание на замеренный 12 угол пружинения, поворотом гибочного шаблона 1. После этого зажимной желоб 2 вновь отходит от заготовки, производится контроль угла пружинения заготовки после ее догибки на угол пружинения, при этом щуп 12 вводится к заготовке поверну тый на угол пружинения, полученный при первом замере. В случае отсутствия рассогласования по фазе между сельсинами 5 и 9 догибка трубы прекращается и последняя удаляется из рабочей зоны трубогибочного станка. Если при повторном контроле угла пружинения не имеет места синфазность сельсинов 5 и 9 изза пружинения заготовки, то производится дополнительная догибка заготовки до тех пор, пока не исчезнет рассогласование по фазе между сельсинами 5 и 9Изобретение обеспечивает за счет исключения сложной электромеханической связи датчика угла пружинения с датчиком угла поворота гибочного шабона повышение точности гибки труб и качества изделий; снижает трудоемкость сборки трубопроводов. Кроме ого, исключением указанной электромеханической связи из устройства, для контроля угла пружинения повышается надежность работы устройства и срок го службы. Экономический эффект от внедрения изобретения в комплексе борудования для гибки диаметjOM 1бО мм составит 10000 руб.в год.
Формула изобретения
1. Устройство для контроля углов пружинения к трубогибочному станку с гибочным шаблоном, зажимным желобом, смонтированным на ползуне, и блоком управления, содержащее датчик угла поворота гибочного шаблона и датчик угла пружинения, имеющий вал и щуп, взаимодействующий с изгибаемой заготовкой, о т ли чающе е с я тем, что, с целью повышения точности контроля, оно снабжено, блоком сравнения, электрически связанным с датчиками угла поворота гибочного шаблона и угла пружинения и блоком управления, а также кареткой с приводом возвратно-поступательного перемещения а направлении гибочного шаблона, несущей подпружиненный тормозной элемент, и укрепленным на датчике угла пружинения диском, взаимодействующим с тормозным элементом, при этом на ползуне выполнены направпякщие для установки каретки, а датчик угла пружинения размещен на каретке.
С--- :. г
2. Устройство по п. Ij отличающееся тем, что щуп выполнен в, виде равноплечего П-образно,го рычага, жестко связанного с валом датчика угла пружинения.
3. Устройство по п. 1, отличающееся тем, что привод возвратно-поступательного перемещения каретки выполнен в виде силового,цилиндра, корпус которого закреплен на ползуне, а шток соединен с кареткой, и расположенных оппозитно силовому цилиндру пружины, увязывающих каретк с ползуном.
Ц, Устройство по п. 1, отличающееся тем, что в ползуне и зажимном желобе выполнены сквозные пазы для захода щупа.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии If 95«80б7, кл. В 21 D 7/16 19.12.7.
2.Авторское свидетельство СССР № 662197i кл. В 21 О 9/16, 1976.
3.Авторское свидетельство СССР № 517356, кл. В 21 D 7/12, 1975.


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УГЛОВ ГИБКИ И УГЛОВ ПРУЖИНЕНИЯ К ТРУБОГИБОЧНОМУ СТАНКУ | 2000 |
|
RU2204454C2 |
| Устройство для измерения угла пружинения к трубогибочному станку | 1976 |
|
SU662197A1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Устройство для контроля углов гибки и пружинения к трубогибочному станку | 1975 |
|
SU517356A1 |
| СПОСОБ ГИБКИ ТРУБ МНОГОКОЛЕННОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ НА ТРУБОГИБОЧНЫХ СТАНКАХ НАМОТОЧНОГО ТИПА | 1993 |
|
RU2076009C1 |
| Трубогибочная машина | 1988 |
|
SU1556786A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 1995 |
|
RU2088358C1 |
| Гибочный станок | 1980 |
|
SU940916A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |