(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU958082A2 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯЛИСТОВОГО ли | 1972 |
|
SU347281A1 |
| Шлифовальный станок | 1980 |
|
SU903082A1 |
| Самоблокирующееся спусковое устройство | 2018 |
|
RU2679163C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ДЕТАЛЕЙ | 2000 |
|
RU2212966C2 |
| САМОБЛОКИРУЮЩЕЕСЯ СПУСКОВОЕ УСТРОЙСТВО | 2014 |
|
RU2551180C1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
1
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, и предназначено для захвата и перемещения заготовок типа тел вращения.
Известен захват манипулятора, содержащий корпус, зажимные рычаги, эксцентриковый кулачок, жестко сидящий на валу и имеющий рукоятку l.
Недостатком данного устройства является отсутствие фиксации при зажиме детали и, как следствие, ослабление зажима детали, что снижает надежность захвата в работе.
Цель изобретения - повышение надежности работы.
Цель достигается тем, что захват снабжен упругим элементом, зубчатьлм сектором, закрепленным на корпусе, и фиксирующим механизмом, в виде подпружиненной собачки, взаимодействующей с зубчатш«1 сектором, причем один конец упругого элемента жестко связан с валом, а другой - кинематически связан с фиксирующим механизмом.
Кроме того упругий элемент выполнен в виде торсиона.
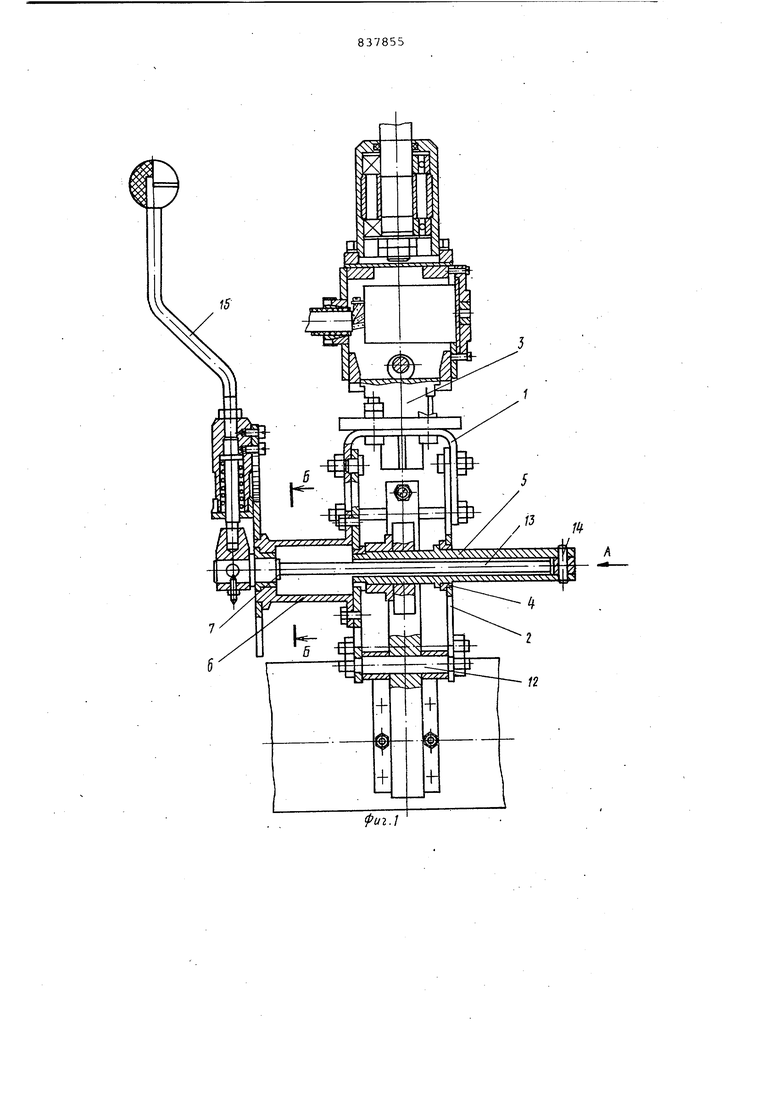
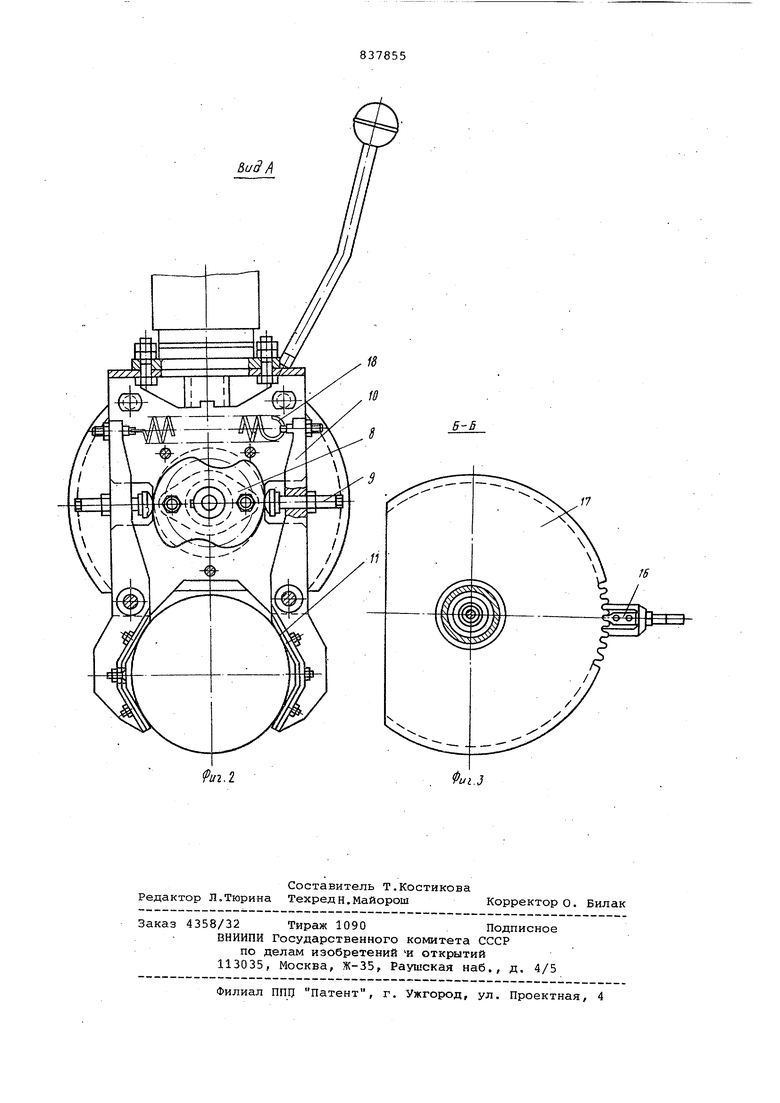
На фиг. 1 изображен захват, продольный разрез; на фиг. 2 - вид А
на фиг, 1; на фиг, 3 - сечение Б-Б на фиг, 1,
Захват содержит корпус 1, щеки 2, закрепленные на головке манипулятора, 3, В щеках 2 корпуса 1 запрессованы втулки 4, в которых установлен с возможностью вращения полый вал 5. К деке 2 корпуса 1 прикреплен стакан 6, в котором запрессована втулка 7, На полом валу 5 жестко закреплен эксцентриковый кулачок 8, Эксцентриковый кулачок 8, взаимодействующий с толкателями 9, установлен в зажимных рычагах 10, передающих усилие зажима на губки 11 захвата. Зажимные рычаги 10 расположены шарнирно на осях 12 корпуса-1, Внутри полого вала 5 расположен гибкий элемент, например торсион 13, жестко связанный сним одним концом при помощи, например, пальца 14. Другой конец торсиона 13 установлен с возможностью поворота от фиксирующего механизма, смонтированного на рукоятке 15. Фиксирующий механизм выполнен в виде подпружиненной собачки 16, взаимодействующей с зубчатым сектором 17. Зубчатый, сектор 17 расположен на стакане 6 корпуса 1, Силовое замыкание толкателя 9 на эксцентриковом кулачке 8
осуществляется пружиной растяжения 18.
Захват работает следукядим образом.
В исходном положении эксцентриковый кулачок 8 повернут так, что толкатели 9 рычагов 10 взаимодействуют со впадина кулачка, при этом под действием пружины 18 происходит раскрытие захвата. После наведения захвата на деталь эксцентриковый кулачок 8 поворачивается при помощи рукоятки 15, при этом собачка 16 усилием, направленным вдоль оси рукоятки 15, выводится из зацепления с фиксирующим сектором 17.
После соприкосновения губок 11 захвата с поверхностью детали под действием усилия, приложенного на конце рукоятки 15, происходит дальнейший зажим детали, при этом выступы эксцентрикового кулачка 8 взаимодействуют с толкателями 9 и создают усилие зажима на губках,11 захвата.
Формула изобретения
1,Захват манипулятора, содержащий корпус, зажимные рычаги, эксцентриковый кулачок, жестко сидящий на валу и имеющий рукоятку, отличающийся тем, что, с целью повышения надежности работы, он снабжен упругим элементом, зубчатым сектором, закрепленным на корпусе, и фиксирующим механизмом, выполненным
в виде подпружиненной собачки, взаимодействующей с зубчатым сектором, причем, один конец упругого элемента жестко связан с валом, а другой кинематически связан с фиксирующим механизмом.
Источники информации, принятые во внимание при экспертизе
П
fui.l
.г
.3
