(54) ШЛИФОВАЛЬНЫЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм вертикальной подачи плоскошлифовального станка | 1979 |
|
SU880707A1 |
| Станок для механической обработки прямоугольных деталей из полимерных материалов | 1981 |
|
SU1002160A2 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| Механизм подач | 1985 |
|
SU1292996A1 |
| Резьбонарезной станок | 1981 |
|
SU990447A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Резьбофрезерный станок | 1990 |
|
SU1798065A1 |
| Ленточношлифовальный станок | 1980 |
|
SU906674A1 |
| Автоматический станок для шлифования желобков у внутренних колец шарикоподшипников | 1938 |
|
SU57463A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
1
Изобретение относится к области машиностроения, в частности к шлифовальцым станкам.
Известен шлифовальный станок, который содержит установленные на станине шлифовальный круг, шиберное устройство с бункером, привод и подвижно установленный на полуоси корпус с фрикционом, кинематически связанный с приводом станка посредством распределительного вала. Фрикцион установлен на оси с возможностью взаимодействия с деталью; полуось подпружинена в направлении детали и снабжена шестерней 1.
Деталь из бункера ихиберным устройством перемешается в рабочую зону станка, где захватывается фрикционом и подается до упора. Шиберное устройство приводится в движение вручную .
Целью изобретения является автоматизация станка.
Цель достигается тем, что механизм поштучной выдачи деталей выполнен в виде соосно и свободно установленных на общей оси храпового колеса со шкивом, шестерни с собачкой, а также установленного с возможностью регулировочного поворота относительно оси сектора перекрышки, при этом механизм поштучной выдачи деталей кинематически связан с приводом фрикциона посредством, введенных в станок зубчатого сектора, кулачка и кривошипа, причем сектор и кулачок жестко закреплены на корпусе фрикциона, а кривошип, связанный с распределительным валом, установлен с возможностью взаимодействия с кулачком, крроме того, шестерня механизма кинематически связана с зубчатым сектором, собачка установлена с возможностью зацепления с храповым колесом и взаимодействия с сектором перекрышки, а шкив через введенный в станок эластичный элемент кинематически связан с шибером.
Кроме того, зубчатый сектор может быть
ts подпружинен.
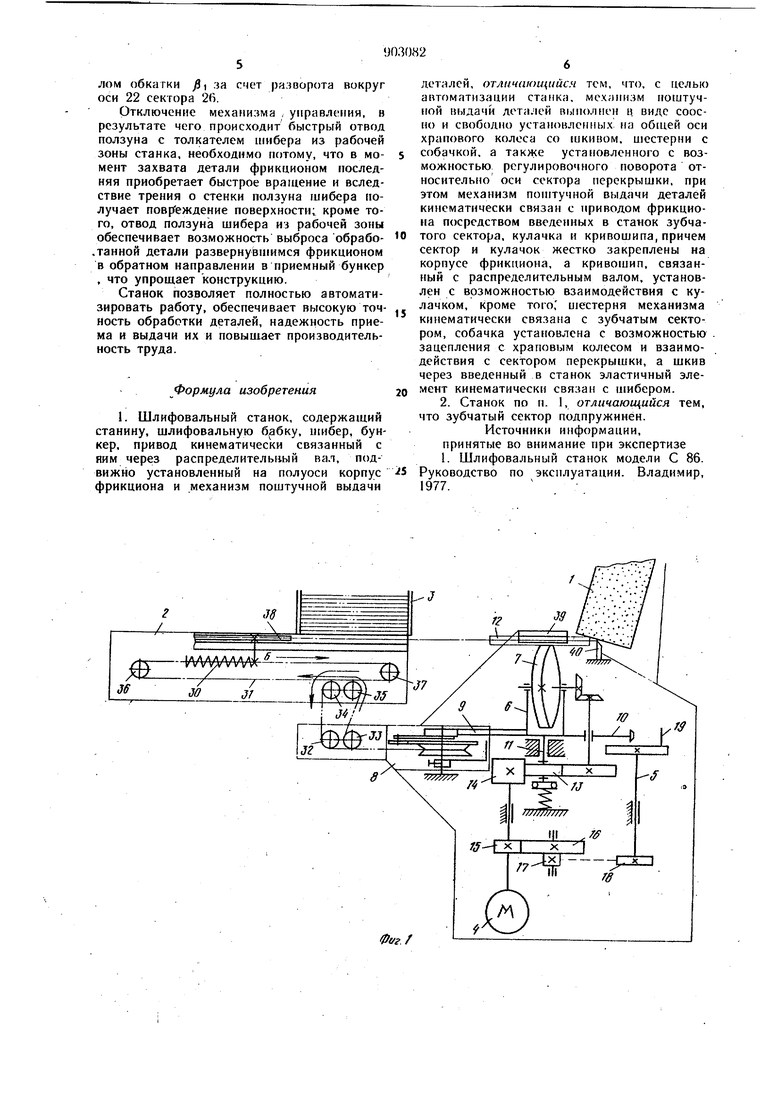
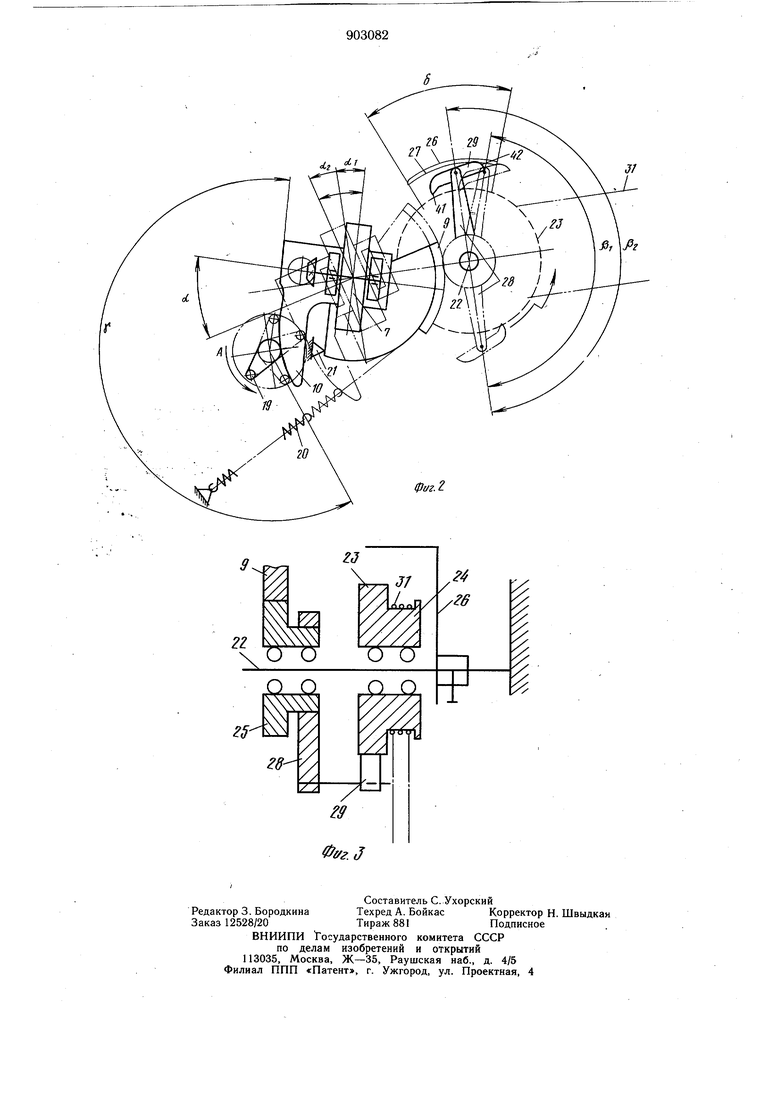
На фиг. 1 изображена обш,ая кинематическая схема шлифовального станка; на фиг. 2 - схема взаимодействия корпуса фрикциона с кривошипом и механизмом уп20 равления; на фиг. 3 - кинематическая схема механизма управления.
Станок содержит установленные на станине шлифовальный круг 1, шиберное устройство 2,; бункер 3, привод 4, расгфеделитеЛьный вал 5, корпус 6 фрикциона 7, механизм 8 управления поштучной выдачи деталей; зубчатый сектор 9 и кулачок 10. Корпус 6 установлен подвижно на полуоси U, которая подпружинена в направлении детали 12 и снабжена для передачи вращения на фрикцион 7 свободно посаженной шестерней 13, связанной с приводом через шестерню 14, сидящую на одной оси с шестерней 15.
От шестерни 15 через группу шестерен 16, 17 н 18 вращение передается на вал 5. Сектор 9 и кулачок 10 жестко закреплены на противоположных сторонах торцовой поверхности корпуса 6. Кулачок 10 взаимодействует с кривошипом 19 вала 5. Сектор 9 подпружинен пружиной 20, закрепленной на станке, которая разворачивает его вместе с фрикционом в исходное положение до регулировочного упора 21. Механизм 8 содержит соосно и свободно установленные на общей оси 22 храповое колесо 23, шкив 24, шестерню 25 и установленный на той же . оси с возможностью регулировочного перемещения сектор (управляющий кулачок) 26, разме1це)1ный периферийной поверхностью 27 над колесом 23. Шестерня 25 кинематически связана с сектором 9. На шестерню 25 жестко закреплен рычаг 28, на котором шарнирно установлена собачка 29, взаимодействующая с колесом 23 или с поверхностью 27 сектора 26. Шкив 24 кинематически связан е возвратной пружиной 30 устройства 2 посредством эластичного элемента (гибкой связи), 31, в частности, через ролики 32, 33, 34, 35, 36, 37 и толкатель 38. В рабочей зоне деталь 12 находится в желобе 39, и ее дальнейщее движение на круг I ограничено упором 40. Собачка 29 выполнена в виде подпружиненного в сторону храповика двуплечего рычага, периодически контактирующего одним своим концом 41 с храповым колесом, а другим кон-цом 42 с внутренней поверхностью 27 сектора 26.
Станок работает следующим образом.
После включения главного двигателя станка включаются вращение круга 1 и привод 4. Вращение от сидящих на одной оси ше1:тер1ен 15 и 14 передается по двум ц ючкам: через шестерни 15, 16, 17, 18, вал 5 - на кривошип 19, а от шестерни 4 через свободно сидящую на полуоси 11 шестерню 13 - на фрикцион 7. При этом кривошип .19, поворачиваясь в направлении, указанном стрелкой А (фиг. 2), воздействует на кулачок 10, разворачивая его вокруг полуоси 11 вместе с корпусом 6 фрикциона 7 и закрепленным на нем сектором 9 на угол ot.Bo время своего поворота сектор 9 обкатывает шестерню 25 с закрепленной на ней собачкой 29 относительно ко леса 23 на угол Д, одновременно взводя пружину 20 (фиг. 2).
Продолжая свое прошение и vKiuuninoM направлении, кривонГип 19 оснобождаот кулачок 10, в результате чего пружина 20 поворачивает корпус фрикциона 7 вместо с сектором 9 до упора 21. При этом сектор 9, шестерня 25 с собачкой 29 возвращаются
в первоначальное положение. Собачка зацепляется с колесом 23 и поворачивает его вместе со шкивом 24, который через элемент 31 сообщает поступательное движение в направлении стрелки Б (фиг. I) ползуну и толкателю 38 шибера 2. Одновременно взводится пружина 30. Толкатель 38 подает деталь 12 из ползуна в желоб 39 до касания с развернутым на угол Л, фрикционом 7, где она тут же подхватывается им и, вращаясь, посылается вдоль желоба
39 на круг 1 до упора 40.
В момент захвата детали 12 фрикционом 7 в механизме 8 шестерня 25 с рычагом 28 и собачкой 29, сцепившейся с колесом 23, завершают поворот на угол pi. Собачка 29 набегает концом 42 на внутреннюю
0 поверхность 27 сектора 26, расцепляется с
колесом 23, а шестерня 25 завершает пово. рот на угол р2 во время которого корпус
фрикциона 7 под действием пружины 20
встает на упор 21.
. Одновременно освободившееся колесо 23 Ёместе со шкивом 24 под действием пружины 30 совершает обратный поворот на угол 1, возвращая элемент 31, а вместе с ним и все детали шибера в исходное полоQ жение. При этом в шибер 2 из бункера 3 поступает очередная деталь.
Работа станка обеспечивается при условии, что усилие пружины корпуса 6 фрикциона 7 должно быть больше усилия пружины 30.
5 Время обработки и выхаживания детали регулируется скоростью вращения вала 5 и углом у свободного поворота кривощипа 19, при котором корпус 6 фрикциона 7 стоит на упоре 21.
, ,.„
Угол у регулируется величиной радиуса
кривошипа 19 и межцентровым расстоянием между валом 5 и полуосью 11.
Усилие прижима детали к упору регулируется разворотом фрикциона 7 на угол я, S за счет перемещения упора 21.
Разворот -фрикциона 7 на угол at для выброса деталей из зоны обработки также регулируется величиной радиуса кривошипа 19 и межцёнтровым расстоянием между валом 5 и полуосью 11. Длина дуги 6 сектора 26 выбирается исходя из условий обеспечения компенсации вариантов регулирования углов dt, и Jz во время которых будет меняться угол обкатки 5.
Величина хода ползуна рсч-улируется передаточным отношением сектора 9 и шее терпи 25.
Момент отключения колеса 23 при захвате детали фрикционом 7 регулируется уг лом обкатки j3i за счет разворота вокруг оси 22 сектора 26. Отключение механизма , управления, в результате чего происходит быстрый отвод ползуна с толкателем шибера из рабочей зоны станка, необходимо потому, что в момент захвата детали фрикционом носледняя приобретает быстрое вращение и вследствие трения о стенки ползуна шибера получает повреждение поверхности; кроме того, отвод ползуна шибера из рабочей зоны обеспечивает возможность выброса обработайной детали развернувшимся фрикционом в обратном направлении в приемный бункер , что упрощает конструкцию. Станок позволяет полностью автоматизировать работу, обеспечивает высокую точность обработки деталей, надежность прие ма и выдачи их и повышает производительность труда. Формула изобретения . Шлифовальный станок, содержащий станину, шлифовальную бабку, шибер, бункер, привод кинематически связанный с ним через распределительный вал, подППт4tpy.JрС4Х-| p.J. II 1 « , . ,вижно установленный на полуоси корпус фрикциона и механизм поштучной выдачи деталей, отличающийся тем, что, с целью ав томатизации станка, мох;)низм поштучной выдачи деталей выполнен в, виде соосно и свободно установленных на обвцей оси храпового колоса со шкивом, шестерни с собачкой, а также установленного с возможностью регулировочного поворота относительно оси сектора перекрышки, при этом механизм по1нтучиой выдачи деталей кинематически связан с приводом фрикциона посредством введенных в станок зубчатого сектора, кулачка и кривошипа, причем сектор и кулачок жестко закреплены на корпусе фрикциона, а кривошип, связанный с распределительным валом, установлен с возможностью взаимодействия с кулачком, кроме того, шестерня механизма кинематически связана с зубчатым сектором, собачка установлена с возможностью зацепления с храповым колесом и взаимодействия с сектором перекрышки, а шкив через введенный в станок эластичный элемент кинематически связан с шибером. 2. Станок по п. 1, отличающийся тем, что зубчатый сектор подпружинен. Источники информации, принятые во внимание при экспертизе 1. Шлифовальный станок модели С 86. ,, Руководство по эксплуатации. Владимир, 1977.
О
О о
5
