1
Изобретение относится к машиностроению и может быть использовано для контроля профилей статоров ротррно-поршневых двигателей, гидронасосов и компрессоров.
Известно устройство для контролятрохоидальной поверхности, содержаще корпус, -установленные в нем с параллельными осями вращения поворотную опору для базирования контролируемого изделия и вал с эксцентрично закрепленным на его. торце пальцем, взаимодействующие между собой шестерни, закрепленные на опоре и вале для сообщения им вращательного движения, планку с продольным пазом, взаимодействующую с пальцем с возможностью поворота в плоскости, перпендикулярной оси его вращения, направляющий штифт, установленный на корпусе перпендикулярно плоскости поворота планки и взаимодействующий с ее продольным пазом, датчик линейных перемещений, закрепленный на планке перпендикулярно оси ее поворота ll .
Однако в этом устройстве палец на торце вала, направляющий штифт и планка с продольным пазом закреплены без возможности регулирования их местоположения, что не позволяет производить контроль трохоидальных поверхностей с различным профилем.
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что устройство снабжено установленной в корпусе с возможностью кругового поступательного перемещения плитой с отверстием для размещения в нем с возможностью
0 вращения пальца, кронштейном с отверстием на одном конце для установки в, нем направляющего штифта и закрепленным другим концом в корпусе установочно-подвижно симметрично плоскости,
5 проходящей через оси вращения повоРОТН9Й опоры и вала, закрепленным на плите установочно-прдвижно в направлении плоскости симметрии кронштейна, суппортом с отверстием для
0 закрепления планки с продольным пазом с возможностью поворота, причем вал выполнен с направляющим пазом на торце со стороны пальца, а палец выполнен с направляющим бруском, которым он установочно-подвижно закреплен в направлянхцем пазе вала.
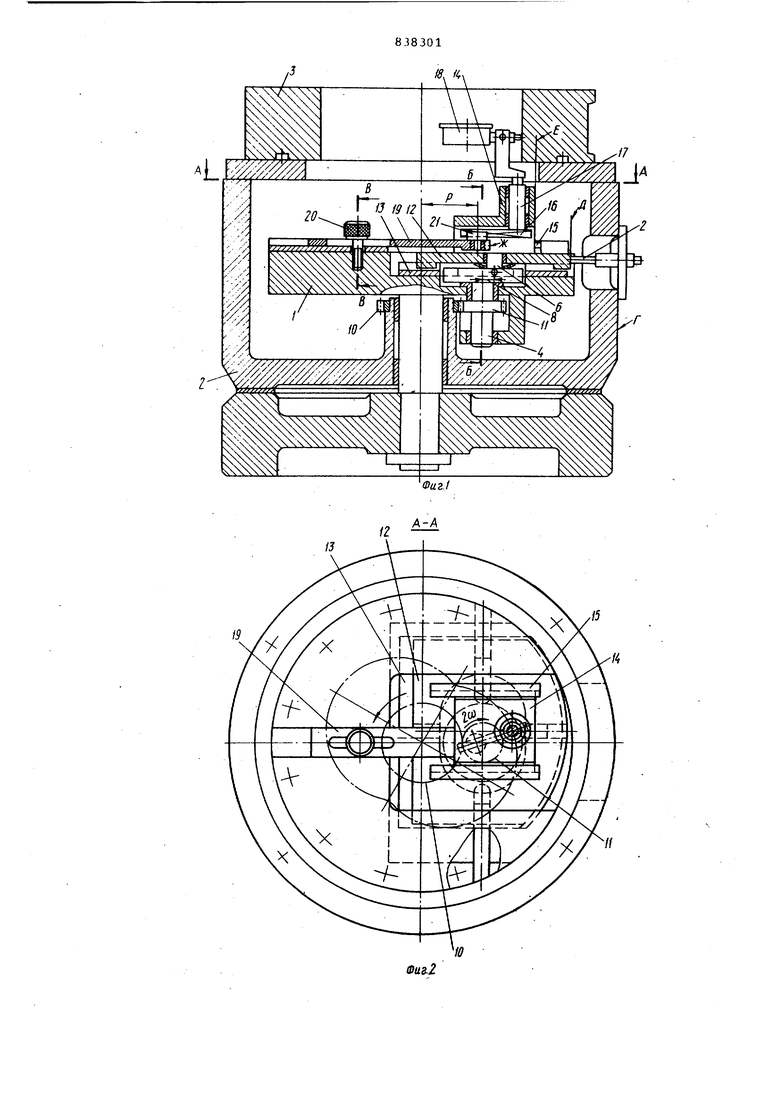
На фиг. 1 показана схема устройства для контроля трохоидальных поверхностей j на фиг. 2 - разрез А-А
0 на фиг. 1; на фиг. 3 - разрез Б-Б
на фиг, 1; на фиг. 4 - разрез В-В на фиг. 1.
Устройство содержит корпус 1, установленные в нем поворотную в горизонтальной плоскости опору 2 для базирования контролируемого изделия 3 и вертикальный вал 4 с направляющи (пазом 5 на верхнем торце, палец 6 с направляющим брусом 7 на нижнем торце, установочно-подвижно закрепленный с помощью винта 8 и вкладыша 9 в направляющем пазу 5 вала 4, взаимодействующие между собой шестерни 10 и 11, закрепленные на опоре 2 и вале 4 для сообщения им вращательного движения, плиту 12 с отверстием для размещения в нем с возможностью вращения пальца 6, крестовину 13 для удержания от проворота плиты 12 относительно корпуса 1, суппорт 14, установочно-подвижно закрепленный в продольных направляющих 15 на плите 12, планку 16 с продольным пазом, закрепленную на нижнем конце шпинделя 17 суппорта 14 с возможностью поворота в горизонтальной плоскости, датчик 18 линейных перемещений, закрепленный на верхнем конце шпинделя 17 перпендикулярно его оси, кронштейн 19, .закрепленный установочно-подвижно с помощью винта 20 в корпусе 1, направляющий штифт 21, установленный на кронштейне 19 и взаимодействующий с продольным пазом планки 16, и регулируемый калибр 22, закрепляемый в корпусе при настройке устройства.,
Устройство работает следующим образом.
В исходном состоянии калибр 22 закрепляют на опоре 2, подводят к нему поверхность А плиты 12 и фиксируют палец, 6 с помощью винта 8. Затем перенастраивают калибр 22, подводят к нему поверхность § суппорта 14 и фиксируют положение суппорта с помощью направляющих 15. Наконец, после перенастройки калибра 22 подводят к нему поверхность Ж кронштейна 19 и фиксируют его- положение винтом 20. При измерении изделие 3 закрепляют на опоре 2, и датчик линейнык пег емещений приводят в соприкосновение с контролируемой поверхностью. От привода вращения через шестерни 10 и 11 опора 2 и вал 4 приводятся во вращение. При этом шпиндель 17 сЬвершает движение по эпитрохоиде а плрн.ка 16, взаимодействуя с направляющим штифтом 21, располагает датчик 18 линейных перемещений по нормали к эпитрохоиде, что позволяет датчику 18 зафиксировать отклонение контролируемого профиля от теоретического .
Формула изобретения
Устройство для контроля трохоидальных поверхностей, содержащее .корпус, установленные в нем с параллельно расположенным осями вращения поворотную опору для базирования контролируемого изделия и ваш с эксцентрично закрепленным на его торце пальцем, взаимодействующие между собой шестерни, закрепленные на опоре и валеДЛЯ сообщения им вращательного движения, планку с продольным пазом, взаимодействующую с пальцем с возможностью поворота в плоскости, перпендикулярной оси его вращения, направляющий штифт, закрепленный на корпусе перпендикулярно плоскости поворота планки и взаимодействующий с ее продольным пазом, датчик линейных перемещений, закрепленный на планке перпендикулярно оси ее поворота, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено установленной в -корпусе с возможностью кругового поступательного перемещения плитой с отверстием для размещения в нем с возможностью вращения пальца, кронштейном с отверстием на одном конце для установки в нем направляющего щтифта и закрепленным другим концом в корпусе установочноподвижно симметрично плоскости, проходящей через оси вращ,ения поворотной опоры и вала, закрепленным на плите установочно-подвижно в направлении плоскости симметрии кронштейна, суппортом с отверстием для установки планки с продольным пазом с возможностью поворота, примем вал выполнен с направляющим пазом на торце со стороны пал.ьца, а палец выполнен с направляющим бруском, которым он установочно-подвижно закреп.лен в направляющем пазе вала.
I
i
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3863353, 5 кл. G 01 В 5/20, 1971 (прототип).
13
Фиг.
А-Л
15
/4
II
40
б-б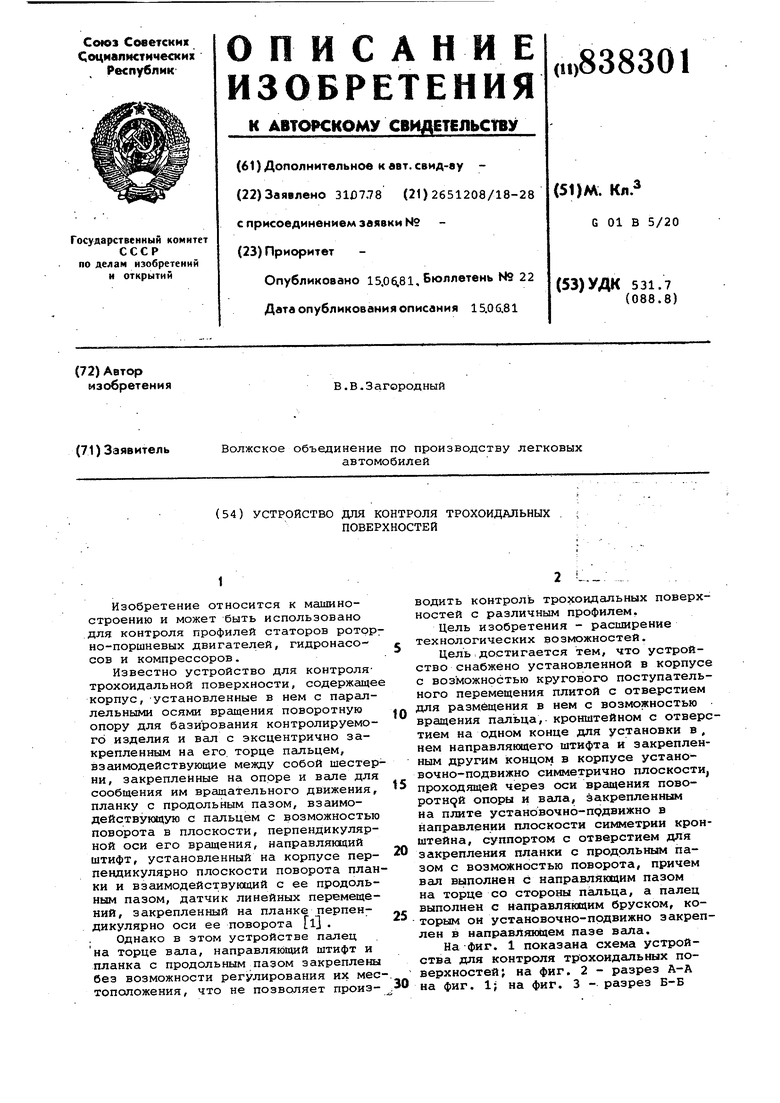
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ДЕРЕВЯННЫХ ИЗДЕЛИЙ | 1994 |
|
RU2072914C1 |
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| Переносной токарный станок для обработки концов труб | 1989 |
|
SU1710193A1 |
| Установочная каретка для центрирования и зажима грифов музыкальных инструментов | 1985 |
|
SU1276492A1 |
| МНОГОШПИНДЕЛЬНЫЙ ПОЛУАВТОМАТ | 1966 |
|
SU222843A1 |
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |
| ПРОМЕЖУТОЧНАЯ КОЗЛОВАЯ ОПОРА МОСТА | 1992 |
|
RU2072405C1 |
| Устройство для настройки резцов непосредственно на станке | 1975 |
|
SU605695A1 |