Предлагаемое изобретение относится к области машиностроения, а в частности - к устройствам для закрепления приспособлений-спутников лопаток при обработке на шлифовальных станках, мойке, контроле на измерительных машинах, хранении в адресных ячейках складов и накопителей, для перехвата в устройстве для закрепления (для смены положения захвата снизу/сбоку).
Из устройств, которые разработаны для закрепления приспособлений-спутников, наиболее близкими являются:
«Устройство для установки приспособлений спутников» (SU 1590318 A1, B23Q 3/00, 1978). Устройство содержит корпус. На противоположных сторонах, которого подвижно установлены прихваты с приводами. На прихватах установлены базирующие ролики с V-образными канавками, предназначенными для взаимодействия с базовыми штырями приспособлений-спутников. Оба прихвата перемещаются по копирным пазам направляющих корпуса. Один ролик выполнен подпружиненным.
К недостаткам данного приспособления можно отнести сложность установки приспособления спутника. Установка должна происходить по сложной траектории, определяемой копирными пазами. Так же к недостаткам можно отнести неопределённость базирования приспособления спутника из-за наличия двойной направляющей.
Известно «устройство для закрепления приспособлений спутников» (патент SU 1348130 A1, B23Q 3/00 1979). Изобретение относится к устройствам для закрепления приспособлений-спутников на сменных столах металлорежущих станков. Изобретение расширяет технологические возможности станка путем загрузки устройства роботом как сверху, так и сбоку. В корпусе размещены качающиеся опоры с поперечными пазами и внутренними перемычками, которые шарнирно закреплены в кронштейнах с клиновидным основанием. Кронштейны закреплены на корпусе с возможностью регулировочного перемещения и имеют продольные пазы, в которых расположены рабочие элементы-плунжеры. Каждый прихват выполнен в виде установленной в качающейся опоре подпружиненной посредством пружины с боковым и нижним регулируемыми упорами скобы. Приводные элементы выполнены в виде соосно расположенных в корпусе подпружиненных толкателей.
К недостаткам приспособления можно отнести сложность конструкции качающихся опор, а следовательно, сложность настройки его для установки спутников, а также необходимость выполнения синхронизации установки всеми опорами.
Известно «устройство для базирования приспособления-спутника» (патент SU 1516301 A1, B23 Q 3/00 1971). Изобретение относится к металлообработке и может быть использовано в станках типа обрабатывающий центр.
Изобретение позволяет повысить точность базирования посредством увеличения площади контакта базирующих элементов. На основании спутника установлены выполненные в виде неподвижных конических пальцев фиксирующие элементы. В спутнике и цилиндрических расточках, размещены с натягом конические втулки, взаимодействующие с торцами резьбовых пробок. Конические втулки зафиксированы в расточках крепежными элементами. При наладке устройства спутник устанавливают на конические пальцы основания. При этом крепежные элементы вывернуты из резьбовых отверстий конических втулок, а резьбовые пробки установлены с зазором между их торцами и опорными поверхностями втулок.
Посредством гидроцилиндра прижим со спутником опускается, втулки смещаются вниз, выбирая зазор между пальцами и коническими отверстиями втулок с фиксацией их положения элементами.
К недостаткам можно отнести необходимость дополнительной настройки приспособления спутника. Усложнение конструкции и требование к наличию гидроцилиндра, что усложняет конструкцию и требует дополнительных затрат на её наладку. Так же при эксплуатации приспособления спутника вследствие частой смены и установки по данным базовым элементам, увеличится их износ и вследствие знакопеременных нагрузок будет происходить постепенное ослабление фиксирующих элементов.
Наиболее близким аналогом, принят за прототип, к предлагаемому изобретению является гибкий производственный модуль, описанный в патенте SU 1541017, B23Q 41/02, 07.02.1990. Гибкий производственный модуль содержит промышленный робот, транспортно-накопительную систему с кассетой, систему управления модулем, станок с размещенными на его станине приводами вращения и подачи инструмента.
Недостатки прототипа.
1. Управление системой выполняется от гидроцилиндра. Что приводит к необходимости наличия гидросистемы в станке, либо добавлению её к существующему оборудованию. Усложняется процесс управления, теряется стабильность и качество позиционирования. Возможны потери масла в системе и, как следствие, снижение давления и эффективности движения исполнительных органов.
2. Настройка, установка и запуск гибкого производственного модуля выполняется каждый раз, оператором вручную, включая подготовку заготовки и установку её в спутник.
3. Точность поворота тисков задана только совпадением оси их поворота и базовой плоскости, так как отсутствуют необходимые компенсационные элементы, будет невозможно обеспечить их согласование и, следовательно, точность поворота тисков и точность отрезаемых образцов.
Преимущество заявляемой системы для манипулирования и закрепления обрабатываемой лопатки - надежность закрепления приспособления-спутника с лопаткой благодаря зажимному механизму, возможность выполнять установку, снятие и перехват роботом-манипулятором приспособления-спутника с зажимных пальцев, расположенных сбоку, на зажимные пальцы, расположенные снизу, и наоборот, отсутствию необходимости использовать сложные электромеханические замковые устройства для надежного закрепления приспособлений-спутников с лопатками.
Это возможно благодаря конструкции и принципу действия зажимного механизма устройства для закрепления: нажимная планка, установленная на захвате робота-манипулятора, нажимает на оголовок пружинного запора, выточка которого совмещается с отверстием и позволяет штифтам приспособления-спутника войти до упора в корпус станции перехвата, после отхода робота-манипулятора от станции перехвата, пружина толкает пружинный запор, который, входя в выточку штифта приспособления-спутника надежно блокирует его перемещение в любом направлении.
Техническим результатом изобретения является повышение надежности закрепления приспособления-спутника в системе для манипулирования и закрепления обрабатываемой лопатки.
Технический результат выражается в обеспечении надежности закрепления приспособлений-спутников с лопатками, возможности выполнять перехват роботом-манипулятором приспособления-спутника с зажимных пальцев, расположенных сбоку, на зажимные пальцы, расположенные снизу, и наоборот, отсутствию необходимости использовать сложные электромеханические, пневмогидравлические и др. замковые устройства для надежного закрепления приспособлений-спутников с лопатками.
Технический результат достигается тем, что в системе для манипулирования и закрепления обрабатываемой лопатки, содержащей приспособление-спутник для размещения лопатки в процессе ее перемещения, робот-манипулятор с захватом, выполненный с возможностью манипулирования приспособлением-спутником, и устройство для закрепления приспособления-спутника, выполненное в виде корпуса, закрепленного на стойке при этом приспособление-спутник снабжено двумя комплектами пальцев, каждый из которых включает в себя зажимной и координирующий палец, установленными на его нижней стороне и на одной из боковых сторон, и двумя цилиндрическими штифтами, один из которых выполнен с выточкой, установленными на его боковой стороне, при этом упомянутый корпус выполнен с двумя отверстиями, имеющими возможность вхождения в них упомянутых штифтов, и снабжен установленным в нем подпружинным запором с выточкой, выполненной с возможностью блокирования запором упомянутого штифта с выточкой и соответственно закрепления приспособления-спутника на упомянутом корпусе, и с ручкой для снятия и/или установки приспособления-спутника при использовании нижнего комплекта упомянутых пальцев, причем на захвате робота-манипулятора установлена нажимная планка с выступом, имеющим возможность контактного взаимодействия с концом пружинного запора, выступающим из корпуса; на конце пружинного запора, выступающего из корпуса, расположен оголовок сферической формы; ручка подпружинного запора расположена в пазе, выполненном в корпусе с возможностью ограничения перемещения ручки и запора и с препятствием выпадения запора из корпуса.
Система для манипулирования и закрепления обрабатываемой лопатки представлена на:
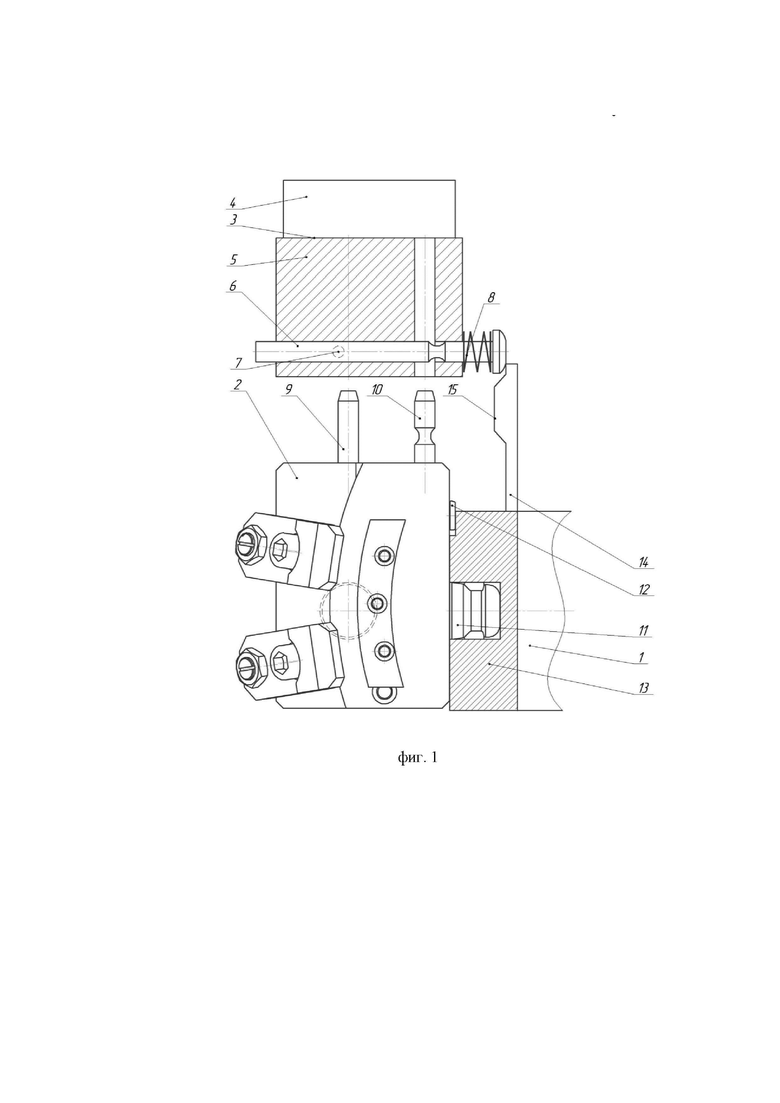
Фиг. 1 - приспособление-спутник до установки роботом-манипулятором в устройство для закрепления;
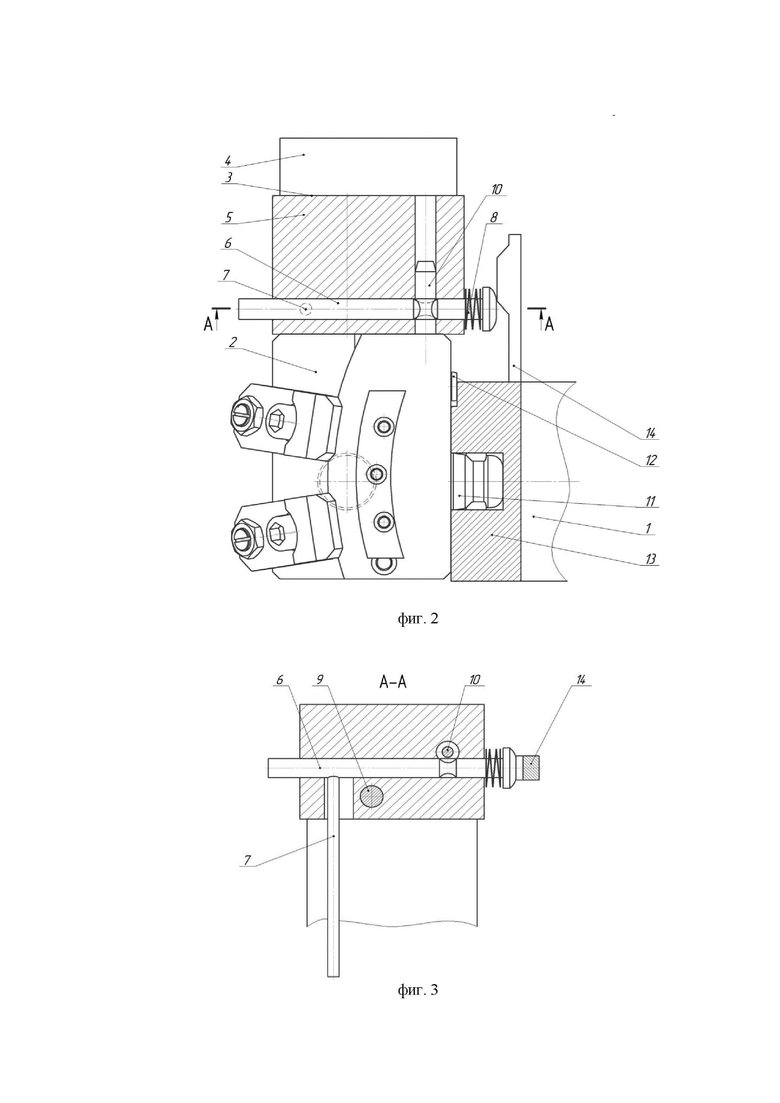
Фиг. 2 - приспособление-спутник после установки в устройство для закрепления и до отстыковки захвата робота-манипулятора зажимного пальца, расположенного сбоку;
Фиг. 3 - сечение А-А на фиг. 2;
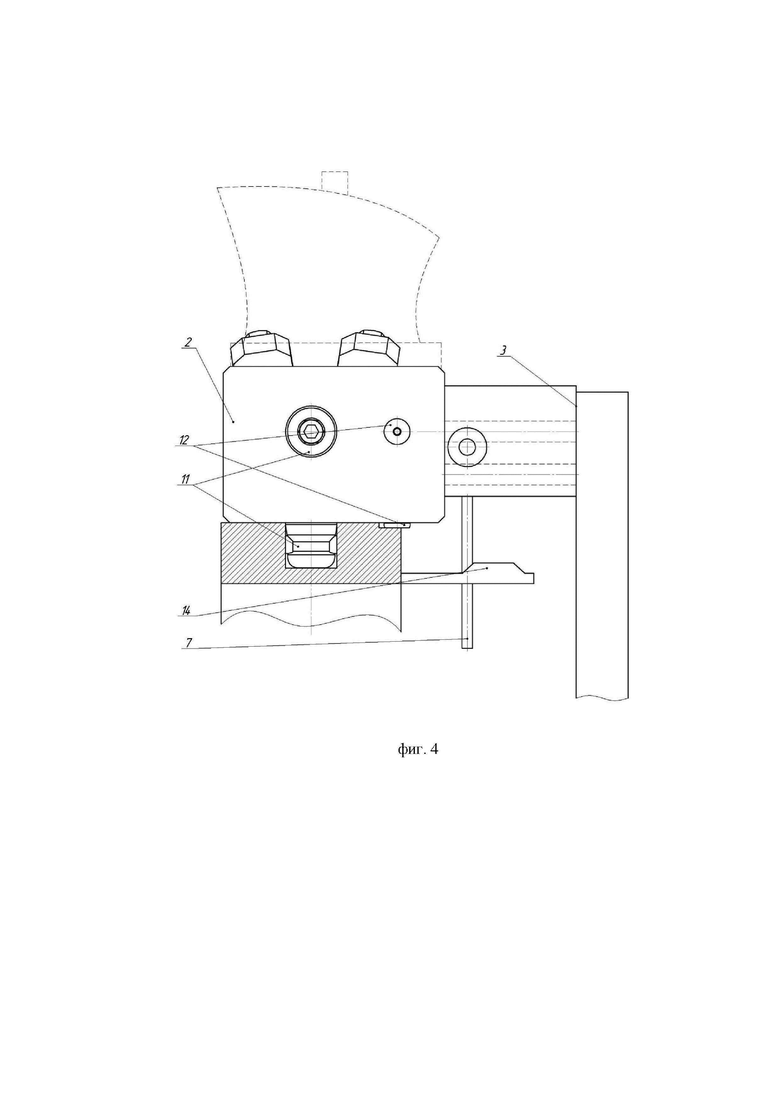
Фиг. 4 - закрепление робота-манипулятора за зажимной палец приспособления-спутника, расположенный снизу.
Приспособление-спутник имеет установочные элементы, позволяющие захвату робота-манипулятора стыковаться с ним в одном из двух положений: снизу или сбоку.
Система для манипулирования и закрепления обрабатываемой лопатки включает в себя:
Фланец робота-манипулятора 1, приспособление-спутник 2 с лопаткой, устройство 3 для закрепления и перехвата роботом-манипулятором приспособлений-спутников с лопатками (фиг. 1). Устройство 3 для закрепления и перехвата роботом-манипулятором приспособлений-спутников с лопатками включает в себя установленный на стойке 4 корпус 5, с расположенными в нём пружинным запором 6 с ручкой 7 для снятия и/или установки приспособления-спутника 2 и пружиной 8. Корпус 5 имеет паз, в котором расположена ручка 7, ширина паза ограничивает перемещение ручки и пружинного запора и препятствует его выпадению из корпуса под действием пружины. Приспособление-спутник 2 с установленными в него гладким штифтом 9 и штифтом 10 с выточкой для фиксации, зажимными пальцами 11 и координирующими пальцами 12 (фиг. 4). Приспособление-спутник 2 имеет два комплекта зажимных пальцев. Приспособление-спутник 2 имеет два цилиндрических штифта, один из которых выполнен с выточкой для закрепления в устройстве. Захват 13 (фиг. 1) с нажимной планкой 14 и выступом 15, установленные на фланце 1 робота-манипулятора (робот-манипулятор не показан).
Схема системы для манипулирования и закрепления обрабатываемой лопатки работает следующим образом: фланец 1 робота-манипулятора совмещает гладкий штифт 9 и штифт 10 приспособления-спутника 2 с отверстиями корпуса 5 устройства для закрепления 3, затем приспособление-спутник 2 перемещается роботом-манипулятором к устройству для закрепления 3, таким образом, что гладкий штифт 9 и штифт 10 входят в отверстия корпуса 5, при этом выступ 15 нажимной планки 14, установленной на захвате 13 робота-манипулятора, нажимает оголовок сферической формы пружинного запора 6, выточка которого совмещается с отверстием корпуса 5 и позволяет штифту 10 приспособления-спутника 2 войти до упора в корпус 5 (фиг. 2), после отхода захвата 13 робота-манипулятора от устройства для закрепления 3, пружина 8 толкает пружинный запор 6, который, входя в выточку штифта 10 приспособления-спутника блокирует его перемещение в любом направлении. Ручка 7, располагаясь в пазу корпуса 5, ограничивает ход пружинного запора 6 (см. фиг. 3).
Для снятия приспособления-спутника 2 за зажимной палец 11, расположенный сбоку, траектория движения захвата робота-манипулятора обратна описанной выше.
Для снятия приспособления-спутника 2 за зажимной палец 11, расположенный снизу (см. фиг. 3), фланец захвата робота-манипулятора, перемещаясь, не доходит до торца зажимного пальца 11, ребро нажимной планки 14, закрепленной на захвате 13 робота-манипулятора, сдвигает ручку 7 пружинного запора 6 до совмещения осей отверстий захвата 13 с осями пальцев 11, 12, расположенных снизу, при этом выточка пружинного запора 6 совмещается с отверстием корпуса устройства 3 для закрепления и перехвата роботом-манипулятором приспособлений-спутников с лопатками, после чего захват 13 робота-манипулятора перемещается до упора в корпус приспособления-спутника 2 (фиг. 4), выполняет фиксацию зажимного пальца 11 и, передвигаясь вдоль осей штифтов 9, 10 извлекает приспособление-спутник 2 из станции перехвата.
Для установки приспособления-спутника 2 в устройство для закрепления 3 за зажимной палец 11, расположенный снизу, захват 13 робота-манипулятора сначала сдвигает ребром нажимной планки 14 ручку 7 до совмещения выточки пружинного запора 6 с отверстием корпуса, затем, передвигаясь вдоль оси ручки 7 совмещает оси штифтов 9, 10 с отверстиями корпуса 5, вставляет штифты до упора в корпус, отстыковывается от зажимного пальца 11, смещается от ручки 7 для закрепления штифта 10 пружинным запором 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО МАНИПУЛИРОВАНИЯ ЛЕГКОПОВРЕЖДАЕМЫМИ ЗАГОТОВКАМИ | 1997 |
|
RU2194606C2 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛЯТОРА | 2015 |
|
RU2611621C2 |
| ДВЕРНОЙ НАКЛАДНОЙ ЗАМОК | 1995 |
|
RU2128763C1 |
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДЕТАЛЕЙ МЕЖДУ КОНВЕЙЕРАМИ, РАСПОЛОЖЕННЫМИ НА РАЗНОЙ ВЫСОТЕ | 1995 |
|
RU2101220C1 |
| Манипулятор для движения каретки тросового лифта вдоль троса | 2023 |
|
RU2823642C1 |
| Система и способ дозаправки спутников | 2008 |
|
RU2607912C2 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| СПОСОБ ЗАХВАТА МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746910C1 |
| Зажимное устройство | 1988 |
|
SU1645092A1 |
Изобретение относится к области машиностроения и может быть использовано для манипулирования и закрепления приспособлений-спутников, например, при обработке лопаток. Система содержит приспособление-спутник для размещения лопатки в процессе ее перемещения, робот-манипулятор с захватом, выполненный с возможностью манипулирования приспособлением-спутником, и устройство для закрепления приспособления-спутника, выполненное в виде корпуса, закрепленного на стойке. При этом приспособление-спутник снабжено двумя комплектами пальцев, каждый из которых включает в себя зажимной и координирующий палец, которые установлены на его нижней стороне и на одной из боковых сторон, и двумя цилиндрическими штифтами, один из которых выполнен с выточкой, установленными на его другой боковой стороне, при этом упомянутый корпус выполнен с двумя отверстиями, имеющими возможность вхождения в них упомянутых штифтов, и снабжен установленным в нем подпружинным запором с выточкой, выполненной с возможностью блокирования запором упомянутого штифта с выточкой и соответственно закрепления приспособления-спутника на упомянутом корпусе. На захвате робота-манипулятора установлена нажимная планка с выступом, имеющим возможность взаимодействия с концом пружинного запора, выступающим из корпуса. Использование изобретения позволяет повысить надежность закрепления приспособления-спутника без усложнения конструкции системы. 2 з.п. ф-лы, 4 ил.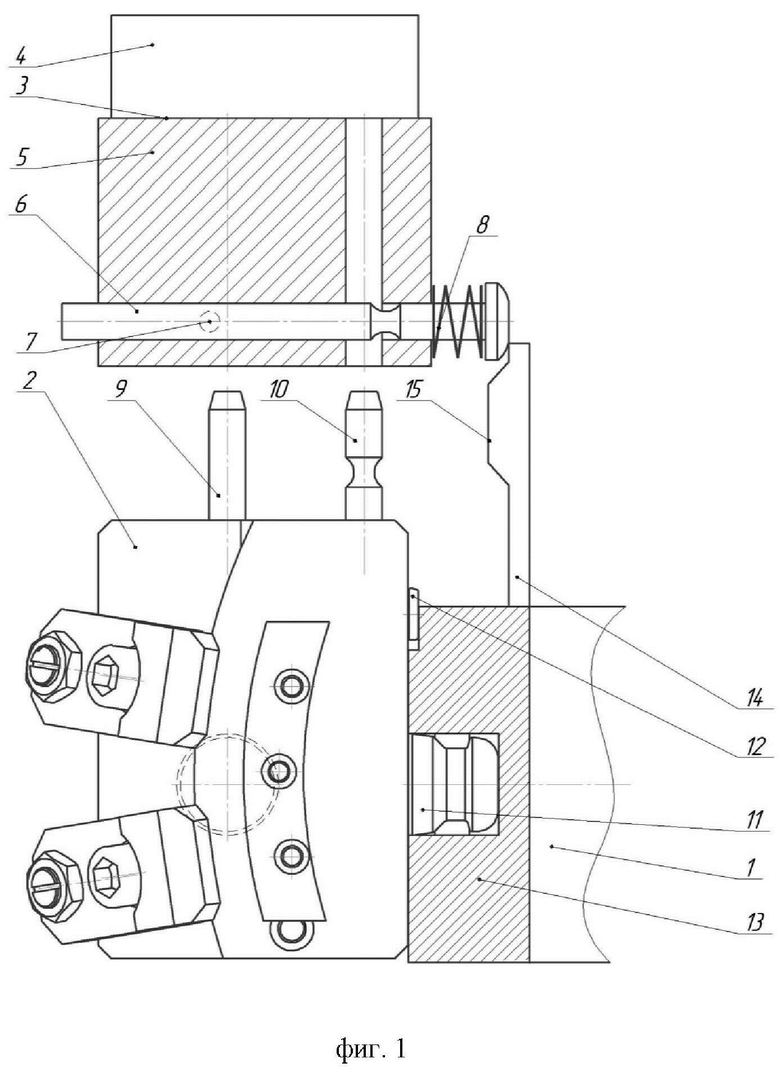
1. Система для манипулирования и закрепления обрабатываемой лопатки, содержащая приспособление-спутник для размещения лопатки в процессе ее перемещения, робот-манипулятор с захватом, выполненный с возможностью манипулирования приспособлением-спутником, и устройство для закрепления приспособления-спутника, выполненное в виде корпуса, закрепленного на стойке, отличающаяся тем, что приспособление-спутник снабжено двумя комплектами пальцев, каждый из которых включает в себя зажимной и координирующий палец, установленными на его нижней стороне и на одной из боковых сторон, и двумя цилиндрическими штифтами, один из которых выполнен с выточкой, установленными на его другой боковой стороне, при этом упомянутый корпус выполнен с двумя отверстиями, имеющими возможность вхождения в них упомянутых штифтов, и снабжен установленным в нем подпружинным запором с выточкой, выполненной с возможностью блокирования запором упомянутого штифта с выточкой и соответственно закрепления приспособления-спутника на упомянутом корпусе, и с ручкой для снятия и/или установки приспособления-спутника при использовании нижнего комплекта упомянутых пальцев, причем на захвате робота-манипулятора установлена нажимная планка с выступом, имеющим возможность контактного взаимодействия с концом пружинного запора, выступающим из корпуса.
2. Система по п. 1, отличающаяся тем, что на конце пружинного запора, выступающего из корпуса, расположен оголовок сферической формы.
3. Система по п. 1, отличающаяся тем, что ручка подпружинного запора расположена в пазе, выполненном в корпусе с возможностью ограничения перемещения ручки и запора и с препятствием выпадения запора из корпуса.
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Транспортное устройство автоматической линии спутникового типа | 1986 |
|
SU1447640A1 |
| Устройство для смены,фиксации и зажима приспособлений-спутников | 1980 |
|
SU867604A1 |
| Устройство для базирования приспособления-спутника | 1987 |
|
SU1516301A1 |
| CN 114714130 A, 08.07.2022 | |||
| CN 217493544 U, 27.09.2022. | |||

