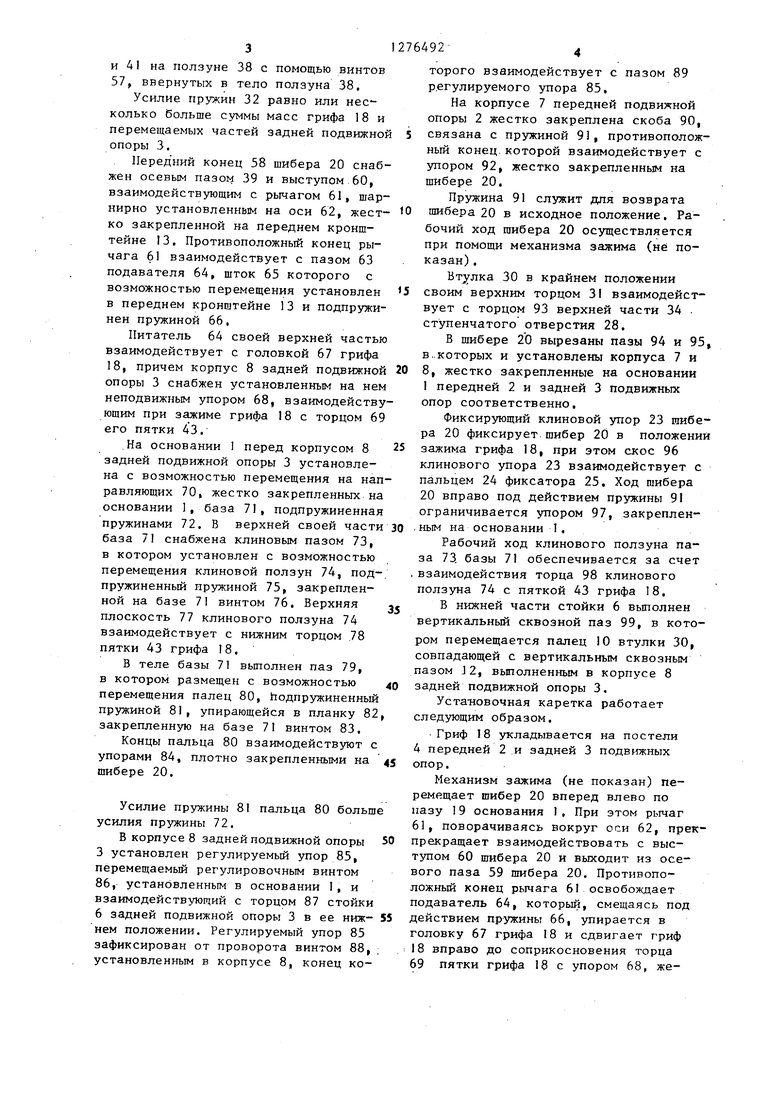
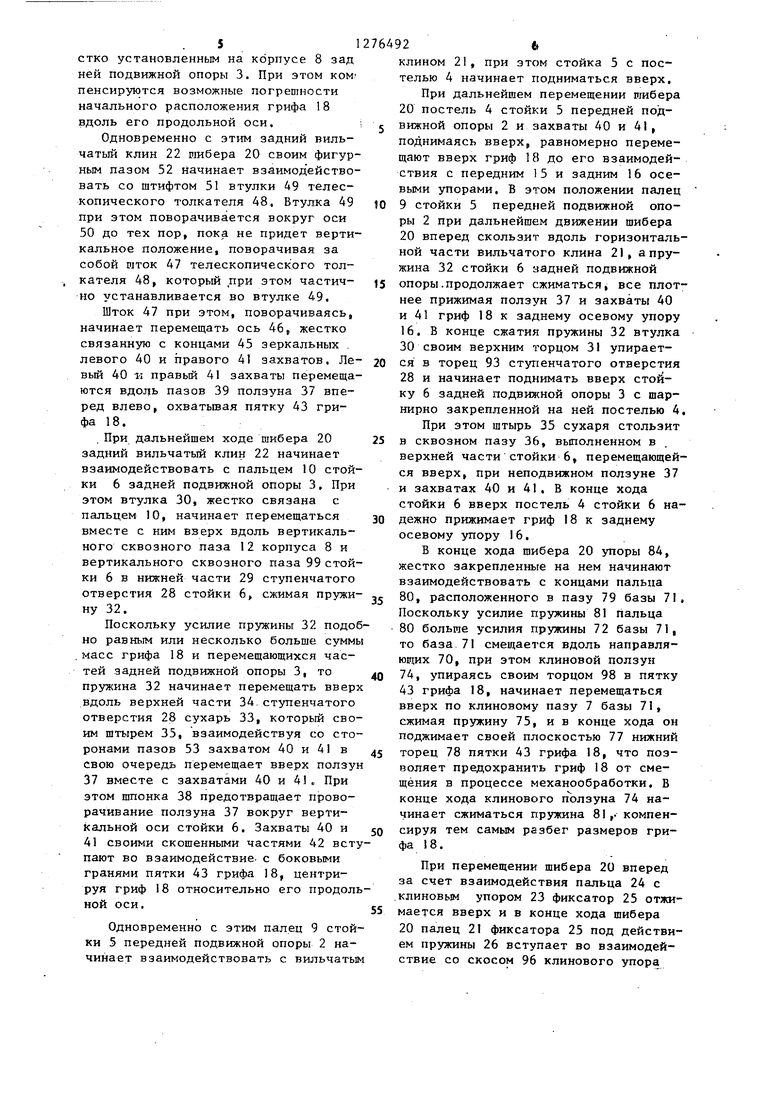
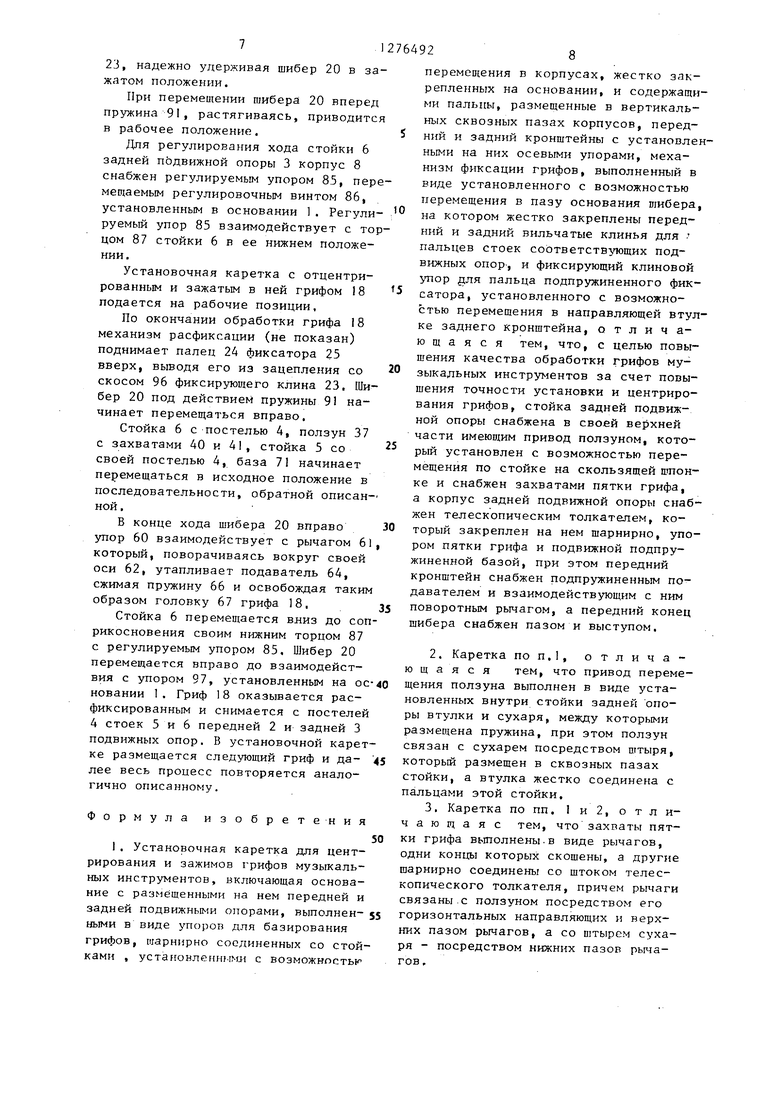
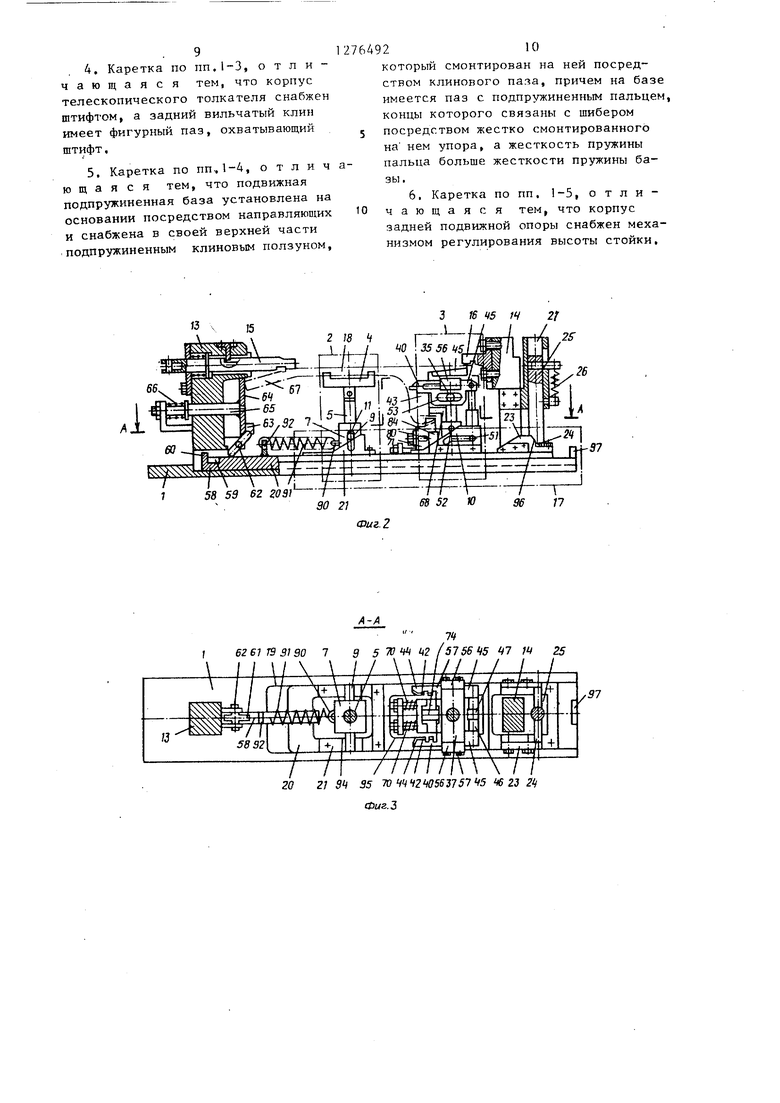
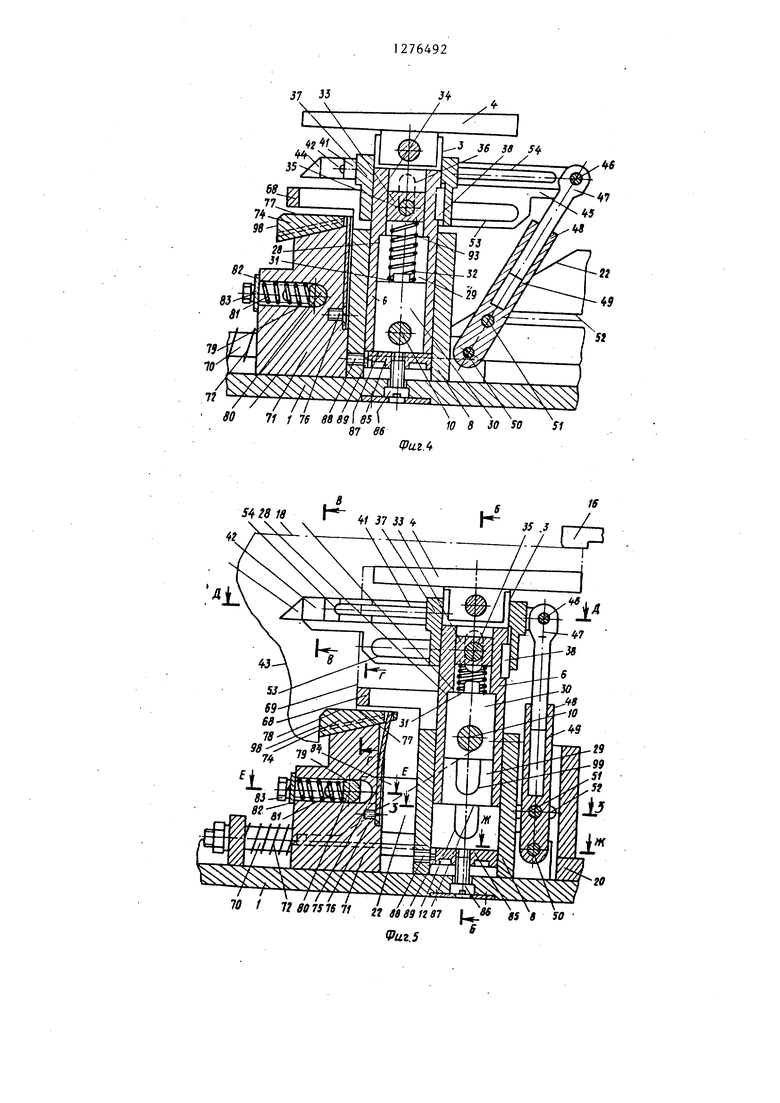
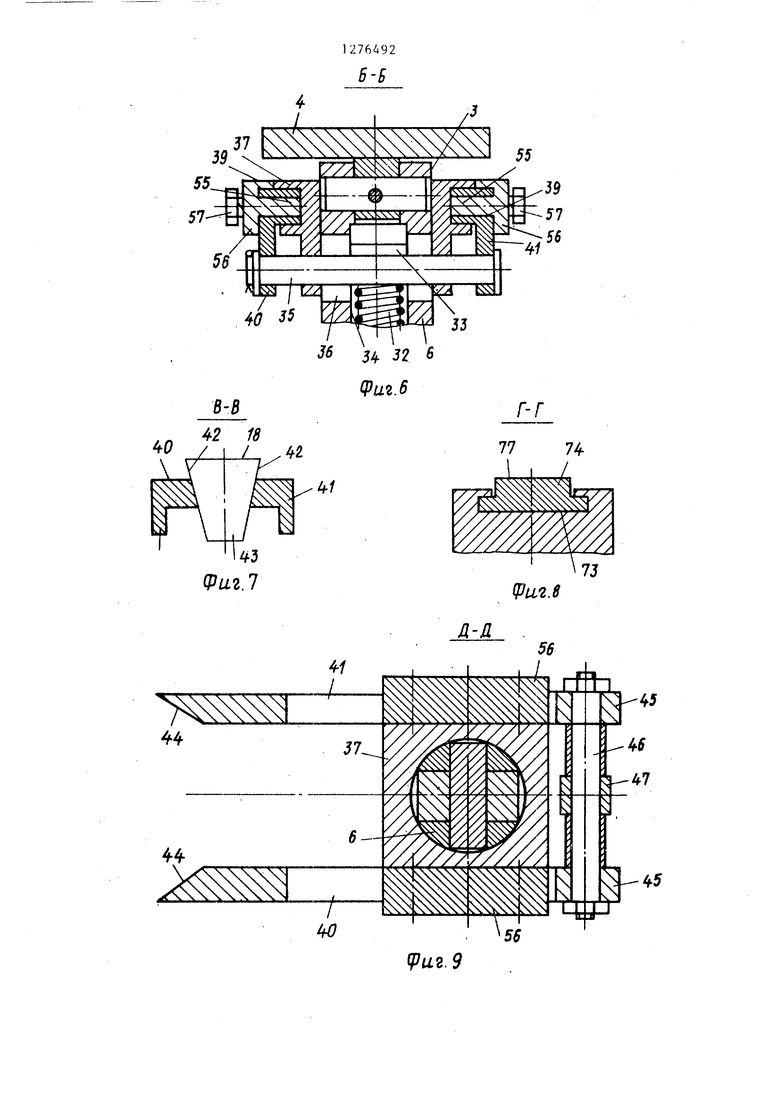
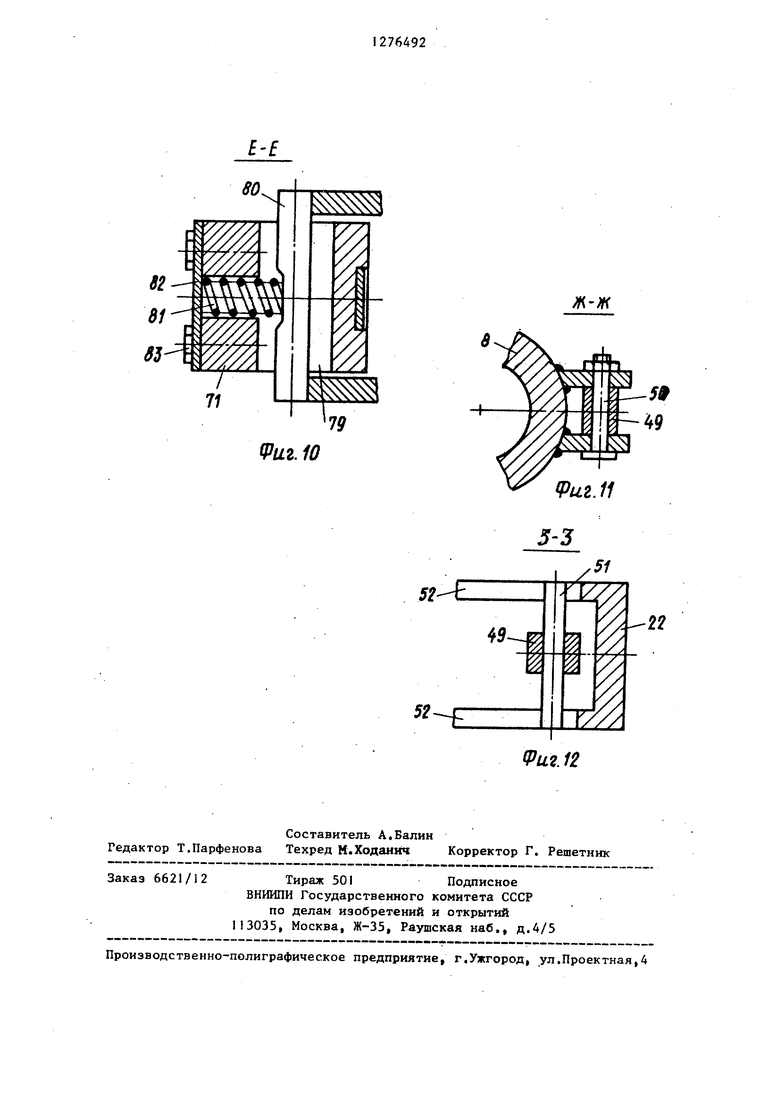
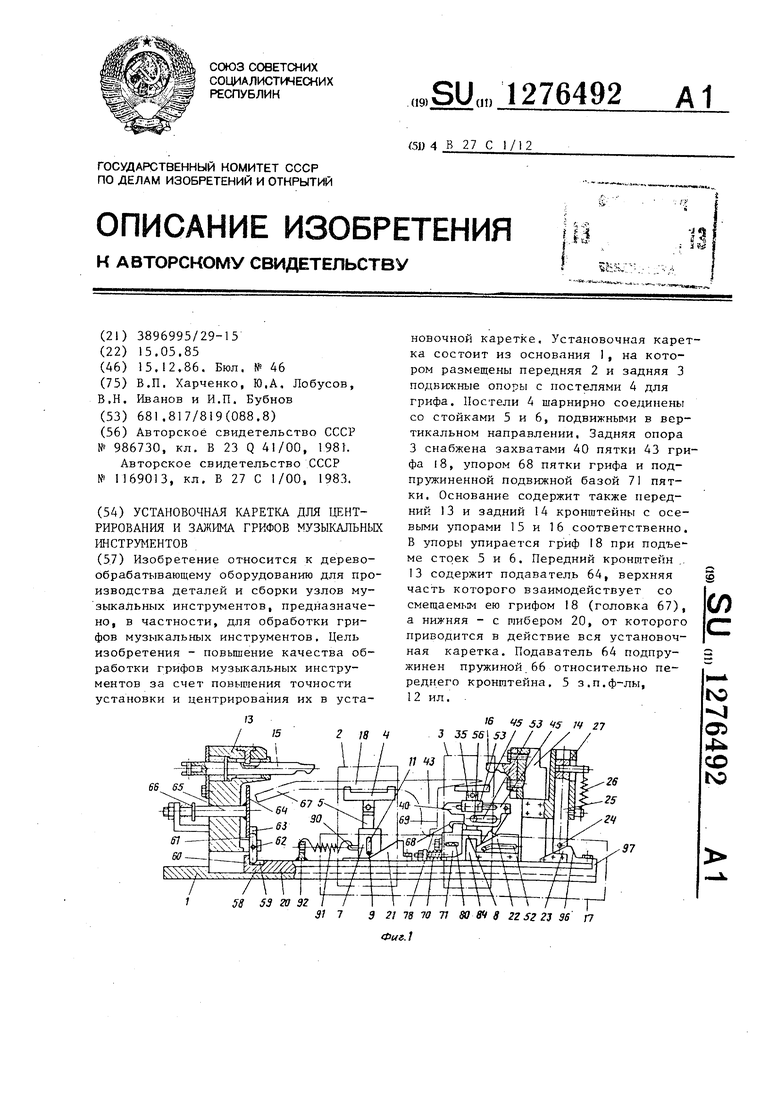
Изобретение относится к технологи ческой оснастке деревообрабатьюающего оборудования, в частности к приспособлениям-спутникам, используемым для производства деталей и сборки узлов музыкальных инструментов, и может быть использовано в деревообрабатывающей и музыкальной промышленностях в технологии изготовления грифов музыкальных инструментов. Цель изобретения - повьпиение качества обработки грифов музыкальных инструментов за счет повышения точности установки и центрирования их в установочной каретке. На фиг,1 изображена установочная каретка (гриф в разжатом положении) общий вид; на фиг,2 - то же, (гриф в зажатом положении); на фиг,3 разрез А-А на фиг,2 (гриф не пока-. зан); на фиг,4 - задняя подвижная опора (в опущенном состоянии); на фиг,5 - то же, (в зажатом положении); на фиг, 6 - сечение Б-Б на фиг.5; на фиг,7 - сечение Б-В на фиг,5; на фиг,8 - сечение Г-Г на 9 - сечение Д-Д фиг,5; на фиг 10 - сечение Е-Е фиг,5; на фиг 5; на фиг,11 - сечение Ж-Ж фиг, фиг, 5; на фиг, 12 - сечение 3-3 фиг,5. Установочная каретка состоит из основания 1, на котором размещены п редняя 2 и задняя 3 подвижные опоры. Они выполнены в виде постелей 4, шарнирно соединенных со стойками 5 и 6 соответственно 2 и задней 3 подвижных опор. Стоики 5 и 6 установлены с возмож ностью перемещения в соответствующи корпусах 7 и 8, жестко закрепленных на основании 1, и содержат соответственно пальцы 9 и 10, размещенные в вертикальных сквозных пазах I1 и соответствующих корпусов 7 и 8 пере ней 2 и задней 3 подвижных опор, . На основании 1 установлены также передний 13 и задний 14 кронштейны с закрепленными на них соответствен но передним 15 и задним 16 осевыми упорами. На основании 1 также разме щен механизм фиксации 17 грифов 18, выполненный в виде установленного с возможностью перемещения в пазу 19 основания 1 щибера 20 с жестко закрепленным на нем передним и задним 22 вильчатыми клиньями, взаимодействующими с пальцами 9 и 10 стое 5 и 6 соответствующих подвижных опор 2 и 3. Механизм фиксации 17 содержит таке фиксирующий клиновой упор 23, взаимодействующий с пальцем 24 фиксатора 25, подпружиненного посредством пружины 26 и установленного с возможностью перемещения в направляющей втулке 27 заднего кронштейна 14 основания 1 , Стойка 6 задней подвижной опоры 3 выполнена полой, со ступенчатым отверстием 28, в нижней части 29 которого с возможностью перемещения установлена втулка 30, жестко связанная с пальцем 10 и взаимодействующая своим верхним торцем 31 с пружиной 32, Пружина 32 в свою очередь противоположным концом взаимодействует с сухарем 33, установленным с возможностью перемещения в верхней части 34 ступенчатого отверстия 28, Сухарь 33 жестко связан со штырем 35, размещенным в верхнем сквозном пазу 36 стойки 6 и взаимодействующим с ползуном 37, установленным с возможностью перемещения по шпонке 38 на верхней части стойки 6, В пазах 39 ползуна 37 с возможностью перемещения установлены зеркально левый 40 и правый 41 захваты, скошенные части 42 которых взаимодействуют с боковыми гранями пятки 43 грифа 18, Захваты 40 и 41 снабжены также скосами 44, облегчающими центрирование грифа 18 при их выдвижении вперед. Противоположные концы 45 захватов 40и 41 жестко связаны осью 46, шарнирно соединенной со штоком 47 телескопического толкателя 48, втулка которого шарнирно установлена на оси 50, жестко закрепленной в корпусе 8 задней подвижной опоры 3, Втулка 49 телескопического толкателя 48 снабжена жестко установленным в ней штифтом 51, взаимодействующим со сквозньи фигурным пазом 52, выполненным в заднем вильчатом клине 22, Концы штыря 35 сухаря 33 взаимодействуют со сторонами продольньк нижних пазов 53 левого 40 и правого 41захватов. Кроме того, захваты 40 и 41 снабжены также верхними пазами 54, сквозь которые пропущены ножки 55 упоров 56, крепящих захваты 40 и 41 на ползуне 38 с помощью винтов 57, ввернутых в тело ползуна 38, Усилие пружин 32 равно или несколько Больше суммы масс грифа 18 и перемещаемых частей задней подвижно опоры 3. Иередний конец 58 шибера 20 снаб жен осевым пазом 39 и выступом 60, взаимодействующим с рычагом 61, шарнирно установленным на оси 62, жестко закрепленной на переднем кронштейне 13, Противоположный конец рычага 61 взаимодействует с пазом 63 подавателя 64, шток 65 которого с возможностью перемещения установлен в переднем кронштейне 13 и подпружинен пружиной 66, Питатель 64 своей верхней частью взаимодействует с головкой 67 грифа 18, причем корпус 8 задней подвижной опоры 3 снабжен установленным на нем неподвижным упором 68, взаимодейству ющим при зажиме грифа 18 с торцом 69 его пятки 43. .На основании 1 перед корпусом 8 задней подвижной опоры 3 установлена с возможностью перемещения на нап равляющих 70, жестко закрепленных на основании 1, база 71, подпружиненная пружинами 72, В верхней своей части база 71 снабжена клиновым пазом 73, в котором установлен с возможностью перемещения клиновой ползун 74, подпружиненный пружиной 75, закрепленной на базе 71 винтом 76, Верхняя плоскость 77 клинового ползуна 74 взаимодействует с нижним торцом 78 пятки 43 грифа 18, В теле базы 71 вьшолнен паз 79, в котором размещен с возможностью перемещения палец 80, hoдпpyжинeнный пружиной 81, упирающейся в планку 82 закрепленную на базе 71 винтом 83, Концы пальца 80 взаимодействуют с упорами 84, плотно закрепленными на шибере 20, Усилие пружины 81 пальца 80 больш усилия пружины 72, В корпусе 8 задней подвижной опоры 3 установлен регулируемый упор 85, перемещаемьй регулировочным винтом 86, установленным в основании I, и взаимодействующий с торцом 87 стойки 6 задней подвижной опоры 3 в ее нижнем положении. Регулируемый упор 85 зафиксирован от проворота винтом 88, установленным в корпусе 8, конец ко92торого взаимодействует с пазом 89 р.егулируемого упора 85. На корпусе 7 передней подвижной опоры 2 жестко закреплена скоба 90, связана с пружиной 91, противоположный конец.которой взаимодействует с упором 92, жестко закрепленным на шибере 20, Пружина 91 служит дпя возврата шибера 20 в исходное положение, Рабочий ход шибера 20 осуществляется при помощи механизма зажима (не показан) , Втулка 30 в крайнем положении своим верхним торцом 31 взаимодействует с торцом 93 верхней части 34 ступенчатого отверстия 28, В шибере 20 вырезаны пазы 94 и 95, в.которых и установлены корпуса 7 и 8, жестко закрепленные на основании 1 передней 2 и задней 3 подвижных опор соответственно. Фиксирующий клиновой упор 23 шибера 20 фиксирует.шибер 20 в положении зажима грифа 18, при этом скос 96 клинового упора 23 взаимодействует с пальцем 24 фиксатора 25, Ход шибера 20 вправо под действием пружины 91 ограничивается упором 97, закрепленным на основании 1, Рабочий ход клинового ползуна паза 73. базы 71 обеспечивается за счет взаимодействия торца 98 клинового ползуна 74 с пяткой 43 грифа 18, В нижней части стойки 6 выполнен вертикальный сквозной паз 99, в котором перемещается палец 10 втулки 30, совпадающей с вертикальным сквозным пазом J2, вьшолненным в корпусе 8 задней подвижной опоры 3. Уста-новочная каретка работает следующим образом, Гриф 18 укладывается на постели 4 передней 2 и задней 3 подвижных опор. Механизм зажима (не показан) перемещает шибер 20 вперед влево по пазу 19 основания 1, При этом рычаг 61, поворачиваясь вокруг оси 62, прекпрекращает взаимодействовать с выступом 60 шибера 20 и выходит из осевого паза 59 шибера 20, Противопоожньй конец рычага 61 освобождает подаватель 64, который, смещаясь под ействием пружины 66, упирается в головку 67 грифа 18 и сдвигает гриф 18 вправо до соприкосновения торца 69 пятки грифа 18 с упором 68, жестко установленным на корпусе 8 зад ней подвижной опоры 3. При этом ком пенсируются возможные погрешности начального расположения грифа 18 вдоль его продольной оси, Одновременно с этим задний вильчатый клин 22 шибера 20 своим фигурным пазом 52 начинает взаимодействовать со штифтом 51 втулки 49 телескопического толкателя 48, Втулка 49 при этом поворачивается вокруг оси 50 до тех пор, пока не придет вертикальное положение, поворачивая за собой шток 47 телескопического толкателя 48, который .при этом частично устанавливается во втулке 49, Шток 47 при этом, поворачиваясь, начинает перемещать ось 46, жестко связанную с концами 45 зеркальных . левого 40 и правого 41 захватов, Левый 40 1-1 правый 41 захваты перемещаются вдоль пазов 39 ползуна 37 вперед влево, охватьшая пятку 43 грифа 18. При дальнейшем ходе шибера 20 задний вильчатый клин 22 начинает взаимодействовать с пальцем 10 стойки 6 задней подвижной опоры 3, При этом втулка 30, жестко связана с пальцем 10, начинает перемещаться вместе с ним вверх вдоль вертикального сквозного паза 12 корпуса 8 и вертикального сквозного паза 99 стойки 6 в нижней части 29 ступенчатого отверстия 28 стойки 6, сжимая пружину 32. Поскольку усилие пружины 32 подо но равным или несколько больше суммы .масс грифа 18 и перемещающихся частей задней подвижной опоры 3, то пружина 32 начинает перемещать ввер вдоль верхней части 34.ступенчатого отверстия 28 сухарь 33, который сво им штырем 35, взаимодействуя со сто ронами пазов 53 захватом 40 и 41 в свою очередь перемещает вверх ползу 37 вместе с захватами 40 и При этом шпонка 38 предотвращает проворачивание ползуна 37 вокруг В€;ртиКальной оси стойки 6. Захваты 40 и 41 своими скошенными частями 42 вст пают во взаимодействие, с боковыми гранями пятки 43 грифа 18, центрируя гриф 18 относительно его продол ной оси. Одновременно с этим палец 9 стой ки 5 передней подвижной опоры 2 начинает взаимодействовать с вильчаты клином 21, при этом стойка 5 с постелью 4 начинает подниматься вверх. При дальнейшем перемещении шибера 20 постель 4 стойки 5 передней подвижной опоры 2 и захваты 40 и 41, поднимаясь вверх, равномерно перемещают вверх гриф 18 до его взаимодействия с передним 15 и задним 16 осевыми упорами, В этом положении палец 9 стойки 5 передней подвижной опоры 2 при дальнейшем движении шибера 20 вперед скользит вдоль горизонтальной части вильчатого клина 21, а пружина 32 стойки 6 задней подвижной опоры.продолжает сжиматься, все плотнее прижимая ползун 37 и захваты 40 и 41 гриф 18 к заднему осевому упору 16. В конце сжатия пружины 32 втулка 30 своим верхним торцом 31 упирается в торец 93 ступенчатого отверстия 28 и начинает поднимать вверх стойку 6 задней подвижной опоры 3 с шарнирно закрепленной на ней постелью 4. При этом штырь 35 сухаря стольэит в сквозном пазу 36, выполненном в верхней частистойки 6, перемещающейся вверх, при неподвижном ползуне 37 и захватах 40 и 41, В конце хода стойки 6 вверх постель 4 стойки 6 надежно прижимает гриф 18 к заднему осевому упору 16. В конце хода шибера 20 упоры 84, жестко закрепленные на нем начинают взаимодействовать с концами пальца 80, расположенного в пазу 79 базы 71, Поскольку усилие пружины 81 пальца 80 больше усилия пружины 72 базы 71, то база 71 смещается вдоль направляющих 70, при этом клиновой ползун 74, упираясь своим торцом 98 в пятку 43 грифа 18, начинает перемещаться вверх по клиновому пазу 7 базы 71, сжимая пружину 75, ив конце хода он поджимает своей плоскостью 77 нижний торец 78 пятки 43 грифа 18, что позволяет предохранить гриф 18 от смещения в процессе механообработки. Б конце хода клинового ползуна 74 начинает сжиматься пружина 81 , компенсируя тем самым разбег размеров грифа 18, При перемещении шибера 20 вперед за счет взаимодействия пальца 24 с клиновым упором 23 фиксатор 25 отжимается вверх и в конце хода шибера 20 палец 21 фиксатора 25 под действием пружины 26 вступает во взаимодействие со скосом 96 клинового упора 7 23, надежно удерживая шибер 20 в за жатом положении. При перемещении шибера 20 вперед пружина 91, растягиваясь, приводитс в рабочее положение. Дпя регулирования хода стойки 6 задней подвижной опоры 3 корпус 8 снабжен регулируемым упором 8.5, пер MenjaeMbiM регулировочным винтом 86, установленным в основании 1. Регули руемый упор 85 взаимодействует с то цом 87 стойки 6 в ее нижнем положении. Установочная каретка с отцентрированным и зажатым в ней грифом 18 подается на рабочие позиции, По окончании обработки грифа 18 механизм расфиксации (не показан) поднимает палец 24 фиксатора 25 вверх, выводя его из зацепления со скосом 96 фиксирующего клина 23. Шибер 20 под действием пружины 91 начинает перемещаться вправо. Стойка 6 с постелью 4, ползун 37 с захватами 40 и 41, стойка 5 со своей постелью 4, база 71 начинает перемещаться в исходное положение в последовательности, обратной описанной. В конце хода шибера 20 вправо упор 60 взаимодействует с рычагом 61 который, поворачиваясь вокруг своей оси 62, утапливает подаватель 64, сжимая пружину 66 и освобождая таким образом головку 67 грифа 18, Стойка 6 перемещается вниз до соп рикосновения своим нижним торцом 87 с регулируемым упором 85. Шибер 20 перемещается вправо до взаимодействия с упором 97, установленным на ос новании 1. Гриф 18 оказывается расфиксированным и снимается с постелей 4 стоек 5 и 6 передней 2 и задней 3 подвижных опор, В установочной карет ке размещается следующий гриф и далее весь процесс повторяется аналогично описанному. Формула изобретения 1. Установочная каретка для центрирования и зажимов грифов музыкальных инструментов, включающая основание с размещенными на нем передней и задней подвижными опорами, выполненными в виде упоров для базирования грифов, шарнирно соединенных со стой ками , устарювленньгмл с возможностьк 92 перемещения в корпусах, жестко закрепленных на основании, и содержащими пальцы, размещенные в вертикальных сквозных пазах корпусов, передний и задний кронштейны с установленными на них осевыми упорами, механизм фиксации грифов, выполненный в виде установленного с возможностью перемещения в цазу основания шибера, на котором жестко закреплены передний и задний вильчатые клинья для пальцев стоек соответстн тощих подвижных опор, и фиксирующий клиновой упор ,цля пальца подпружиненного фиксатора, установленного с возможностью перемещения в направляющей втулке заднего кронштейна, отличающаяся тем, что, с целью повышения качества обработки грифов музыкальных инструментов за счет повышения точности установки и центрирования грифов, стойка задней подвижной опоры снабжена в своей верхней части имеющим привод ползуном, который установлен с возможностью перемещения по стойке на скользящей шпонке и снабжен захватами пятки грифа, а корпус задней подвижной опоры снабжен телескопическим толкателем, который закреплен на нем шарнирно, упором пятки грифа и подвижной подпружиненной базой, при этом передний кронштейн снабжен подпружиненным подавателем и взаимодействующим с ним поворотным рычагом, а передний конец шибера снабжен пазом и выступом. 2.Каретка поп.1, отличащаяся тем, что привод перемеения ползуна выполнен в виде установленных внутри стойки задней опоры втулки и сухаря, меЯщу которыми размещена пружина, при этом ползун связан с сухарем посредством штыря, оторый размещен в сквозных пазах тойки, а втулка жестко соединена с альцами этой стойки, 3,Каретка по пп. I и 2, о т л иа ю щ а я с тем, что захваты пяти грифа выполнены.в виде рычагов, дни концы которых скошены, а другие арнирно соединены со щтоком телесопического толкателя, причем рычаги вязаны.с ползуном посредством его оризонтальных направляющих и верхих пазом рычагов, а со штырем сухая - посредством нижних пазов рычаов,.
4.Каретка по iin.1-3, отличающаяся тем, что корпус телескопического толкателя снабжен штифтом, а задний вильчатый клин имеет фигурный паз, охватывающий штифт,
5.Каретка по пп.. 1-А, о т л и ч ю щ а я с я тем, что подвижная подпружиненная база установлена на основании посредством направляющих и снабжена в своей верхней части подпружиненным клиновым ползуном,
9210
который смонтирован на ней посредством клинового паза, причем на базе имеется паз с подпружиненным пальцем, концы которого связаны с шибером посредством жестко смонтированного
на нем упора, а жесткость пружины пальца больше жесткости пружины базы.
6. Каретка по пп, 1-5, о т л и чающаяся тем, что корпус
задней подвижной опоры снабжен механизмом регулирования высоты стойки.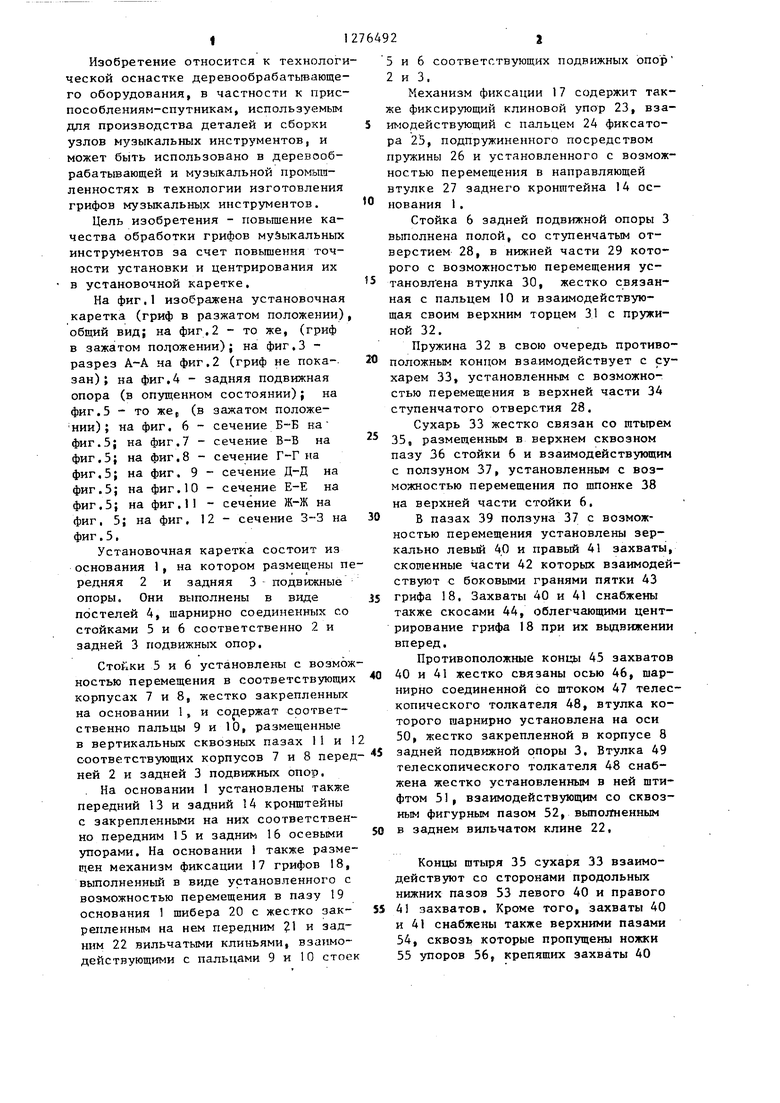
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Линия для изготовления и сборки грифов музыкальных инструментов | 1983 |
|
SU1169013A1 |
| Станок для фрезерования мест сопряжений деревянных деталей | 1984 |
|
SU1219350A1 |
| Автоматический комплекс для сборки обуви | 1985 |
|
SU1384315A1 |
| СПОСОБ УМЕНЬШЕНИЯ УСИЛИЯ ОТДАЧИ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ И ПУШКА С ОТКИДНЫМ ПАТРОННИКОМ ДЛЯ ЕГО РЕАЛИЗАЦИИ. ВАРИАНТЫ | 2019 |
|
RU2736305C1 |
| Устройство для запрессовки и обрезки ладков в грифе музыкального инструмента | 1985 |
|
SU1307471A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
К 45 t4 2f
68,
П.
Tt 9в
7/ / 76 в889 85
4, j7 „.
tl 31 33 ff.
-VX
и ,/, {,,,„ ..
J4
Л
30 50 f1
W
87 ffS
IS
iQ
1276492
40 35
5-S
55
39
B-B
/n 2
. / I / 2
r-r
74(Pu2.e
97ц 8.9
71
jg
fPuz. 10
в
(риг. 11
| Сборочная линия | 1981 |
|
SU986730A1 |
| 0 |
|
SU169013A1 | |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
