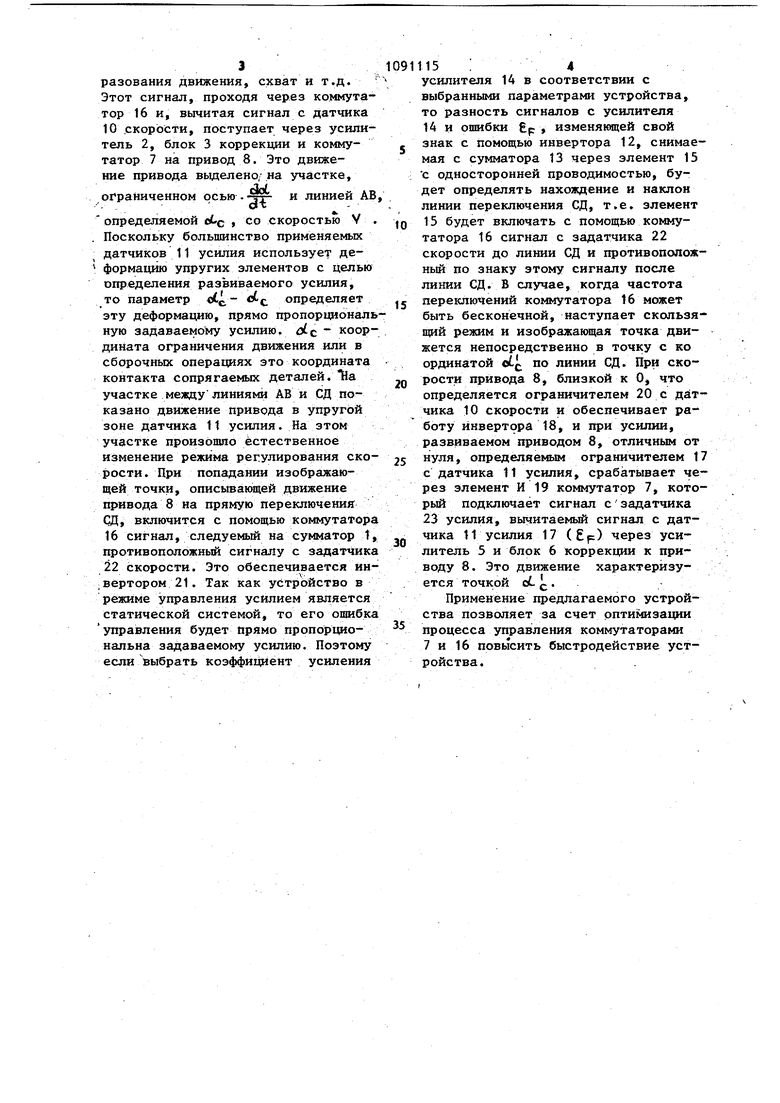
1 Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов. Известны устройства для управления сборочным роботом, содержащие задатчики скорости и усилия, суммат ры, блоки коррекции, усилители, ком мутатор, привод, датчики скорости и усилия Cl.j. Указанные устройства не обеспечдрают сборку подвижных объектов. Наиболее близким к предлагаемому является устройство, содержащее задатчик скорости, последовательно соединенные сумматор, первьй усилитель, первый блок коррекции, первый коммутатор и привод, связанный через исполнительный механизм с Д атчиком усилия и датчиком скорос ти , выход которого подключен к первому входу первого сую атора, после довательно соединенные задатчик усилия, второй сумматор, второй уси литель к второй блок коррекции, под ключенный выходом к второму входу первого коммутатора, второй вход вт рого сумматора соединен с выходом датчика усилия, а выход через после довательно включенные первый инвертор и третий румматор - с входом эл мента с односторонней проводимостью L2 3При всех достоинствах двухрежимного управления приводами по миниму му ошибки основными недостатками эт го устройства являются длительные переходные процессы управления усилием, не уменьшаемые синтезом бл ков коррекции особенно при сравнительно малом задании скорости относительно задания по усилию. Цель изобретения - повьпаение быст родействия устройства. Поставленная цель достигается, тем, что в устройство, содержащее задатчик скорости, последовательно соединенные первый сумматор, первый усилитель, первый блок коррекции, первый коммутатор и привод, связанный через исполнительный механизм с датчиком усилия и датчиком скорости, выход которого подключен к первому входу первого сумматора, последовательно соединенные задатчик усилил, второй сумматор, второй усилитель и второй блок коррекции, подключённый выходом к второму входу первого коммутатора, второй вход 151 второго сумматора соединен с выходом датчика усилия, а выход через последовательно включенные первый инвертор и третий сумматор - с входом элемента с односторонней проводимостыа: введены третий усилитель, первый ограничитель и последовательно соединенные второй ограничитель, второй инвертор и элемент И, а талсже последовательно включенные третий инвертор и второй коммутатор, второй вход которого подключен к входу третьего инвертора и выходу задатчика скорости, третий вход к выходу элемента И с односторонней проводимостью, а выход - к второму входу первого сумматора, соединенного первым входом с входом второго ограничителя, выход датчика усилия подклнзчен к входу первого ограничителя, выход которого соединен, с вторым входом элемента И, подключенного вь1ходом к третьему входу первого коммутатора, а выход задатчика усилия через третий усилитель соединен с вторым входом третьего сумматора. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 диаграммы фазовых траекторий движения устройства. Устройство содержит первый сумматор 1, первый усилитель 2, первый блок 3 коррекции, второй сумматор 4, второй усилитель 5, второй блок 6 коррекции, первьй коммутатор 7, привод 8, исполнительный механизм 9, датчик 10 скорости, датчик 11 усилия, первый инвертор 12, третий сумматор 13, третий усилитель 14, элемент 15 с односторонней проводимостью, второй коммутатор 16, первый ограничитель 17, второй инвертор 18, элемент И 19, второй ограничитель 20, третий инвертор 21, задатчик 22 скорости, задатчик 23 усилия, задающий орган 24. На фиг. 2 обозначены: de - координата перемещения привода, координата ограничения движения, - координата скорости, ot Устройство работает следуняцим образом. С задатчика 22 скорости поступает сигнал на отработку приводом 8 заанной скорости для исполнительного механизма 9, который представляет собой исполнительный орган манипуятора, содержащий механизмы преоб3разования движения, схват и т.д. Этот сигнал, проходя через коммутатор 16 и, вычитая сигнал с датчика 10 скорости, поступает через усилитель 2, блок 3 коррекции и коммутатор 7 на привод 8. Это движение привода вьщелено/на участке, ограниченном осью . т и линией АВ определяемой ct-c со скоростью V . Поскольку большинство применяемых датчиков 11 усилия использует де формацию упругих элементов с целью определения развиваемого усилия, то параметр с определяет эту деформацию, прямо пропорциональ ную задаваемому усилию, d-c координата ограничения движения или в сборочных операциях это координата контакта сопрягаемых деталей. Тйа участке мезвду линиями АВ и СД показано движение привода в упругой зоне датчика 11 усилия. На этом участке произошло естественное изменение режима регулирования скорости. При попадании изображающей точки, описыванйЦей движение привода 8 на прямую переключения СД, включится с помощью коммутатора 16 сигнал, следуемый на сумматор 1, противоположный сигналу с задатчика 22 скорости. Это обеспечивается йн;Вертором 21. Так как устройство в режиме управления усилием является статической системой, то его ошибка управления будет прямо пропорциональна задаваемому усилию. Поэтому если йыбрать коэффициент усиления 15 : 4 усилителя 14 в соответствии с выбранными параметрами устройства, то разность сигналов с усилителя 14и ошибки &р изменякщей свой знак с помощью инвертора 12, снимаемая с сумматора 13 через элемент 15 с односторонней проводимостью, будет определять нахождение и наклон линии переключения СД, т.е. элемент 15будет включать с помощью коммутатора 16 сигнал с задатчика 22 скорости до линии СД и противоположный по знаку этому сигналу после линии СД. В случае, когда частота переключений коммутатора 16 может быть бесконечной, наступает скользящий режим и изображакщая точка движется непосредственно в точку с ко ординатой о по линии СД. При скорости привода 8, близкой к О, что определяется ограничителем 20 с датчика 10 скорости и обеспечивает работу инвертора 18, и при усилии, развиваемом приводом 8, отличным от нуля, определяемым ограничителем 17 с датчика 11 усилия, срабатывает через элемент И 19 коммутатор 7, который подключает сигнал сзадатчика 23 усилия, вычитаемый сигнал с датчика 11 усилия 17 ( р) через усилитель 5 и блок 6 коррекции к приводу 8. Это движение характеризуется точкой оС . Применение предлагаемого устройства позволяет за счет оптимизации процесса управления коммутаторами 7 и 16 повысить быстродействие устройства.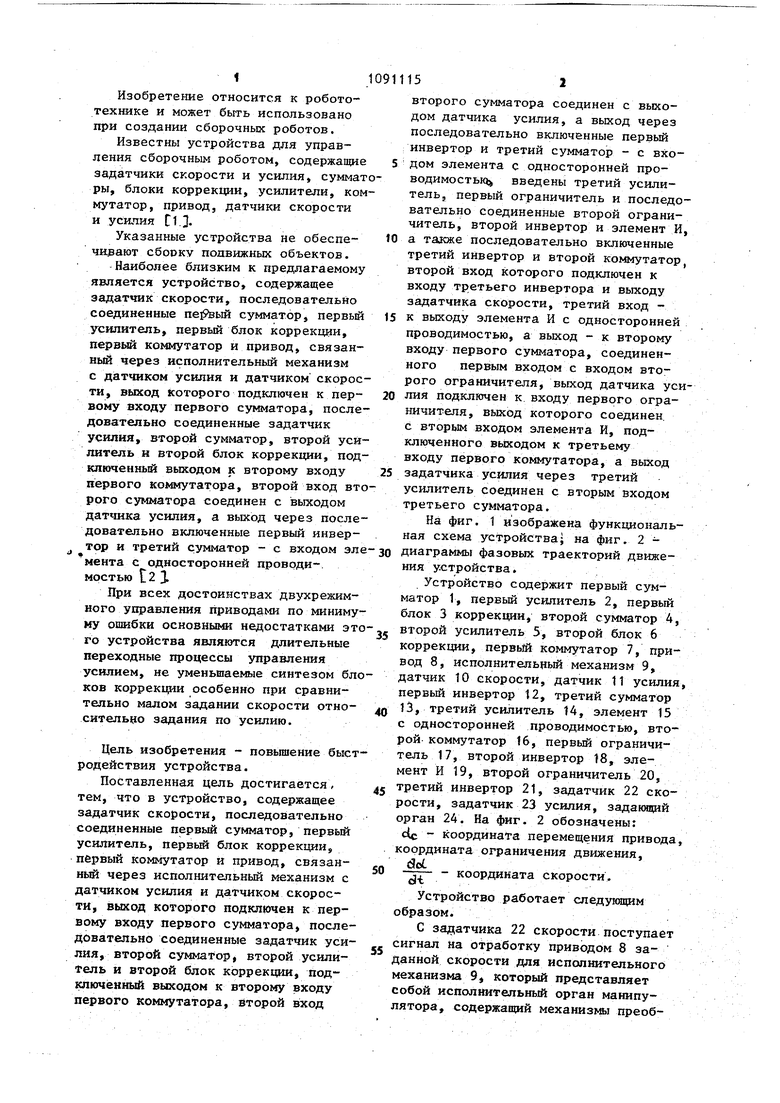
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СБОРОЧНЫМ РОБОТОМ, содержащее эадатчик скорости, последовательно соединенные первый сумматор, первь усилитель, первый блок коррекции, первый коммутатор и привод, связанный через исполнительньй механизм с датчиком усилия и датчиком скорости, выход которого подключен к первому входу первого сумматора, последовательно соединенные задатчик усилия; второй сумматор, второй усилитель и второй блок коррекции, подключенный выходом к второму входу первого коммутатора, второй вход второго сумматора соединен с выходом датчика усилия, а выход через последовательно включенные первый инвертор и третий сумматор - с входом элемента с односторонней проводимостью, отличающееся тем, что, с целью повьшения его быстродействия, оно содержит третий усилитель, первый ограничитель и последовательно соединенные второй ограничитель, второй инвертор и элемент И, а также последовательно включенные третий инвертор и второй коммутатор, второй вход которого подключен к входу третьего инвертора и выходу задатчика скорости, третий вход - к выходу элемента И с односторонней пpoвoдимoctью, а выход - к второму входу первого сумматора, соединенного первым вхоS дом с входом второго ограничителя, е выход датчика усилия подключен к входу первого ограничителя, выход . которого соединен с вторым входом Ф элемента .И, подключенного выходом к третьему входу первого коммутатора, а выход задатчика усилия через третий усилитель соединен с вто:л ; рым входом третьего сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3368099/24, | |||
| j | |||
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
