(54) СТЕНД ДЛЯ ИСПЫТАНИЙ СИСТЕМБ1 УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА
колеса определяется жесткостью пневматика и давлением воздуха в нем, а также действующей на колесо нагрузкой. Нагрузка на колесо в свою очередь зависит от веса транспортного средства и аэродинамической подъемной силы, являющейся функцией скорости транспортного средства и его аэродинамических характеристик и присущей летательным аппаратам и, в меньщей степени, автомобиля. Величина изменения радиуса колеса при тормозном пробеге зависит от типа транспортного средства и для летательных аппаратов с пневматиками высокого давления составляет 10-15% 1.
Однако в известном стенде изменение радиуса колеса при тормозном пробеге не моделируется, что приводит к погрешности определения длины тормозного пути на 5- 7%, скорости нетормозного колеса - на 10-IS /o, мощности поглощаемой тормозом и пневматиком колеса - на 10-15%, работы совершаемой тормозом и пневматиком колеса -на 5-7%, т.е. к существенной неточности воспроизведения нагрузочных режимов.X
Цель изобретения - повышение точности воспроизведения нагрузочных режимов и точности результатов испытаний.
Указанная цель достигается тем, что стенд снабжен блоком воспроизведения функциональной зависимости угловой скорости незатормаживаемого колеса от скорости движения транспортного средства, вход которого подключен к тахогенератору, механически связанному с валом маховика-имитатора кинетической энергии и скорости транспортного средства, а выход - к одному из входов блока вычисления величины скольжения тормозного колеса.
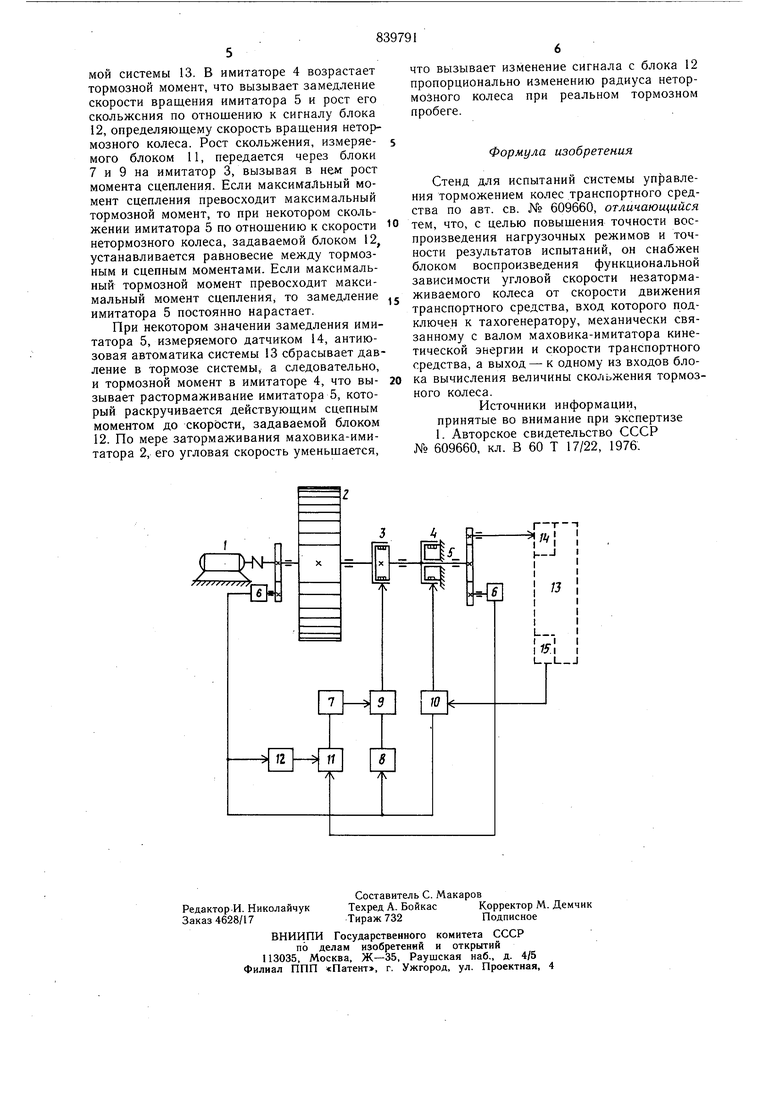
На чертеже представлена блок-схема стенда для испытаний систем управления торможением колес транспортного средства.
Стенд содержит связанные между собой трансмиссией двигатель 1 раскрутки, имитатор 2 кинетической энергии и скорости (например,маховик), имитатор 3 момента сцепления колеса с покрытием дороги (например, электромагнитную порошковую муфту) имитатор 4 тормозного момента (например, электромагнитный порошковый тормоз), имитатор 5 колеса и датчики 6 скорости (напр,имер, тахогенераторы). Кроме того, стенд содержит блоки 7 и 8 воспроизведения функциональных зависимостей момента сцепления, соответственно, от скольжения и от скорости, блок 9 умножения, блок 10 воспроизведения функциональной зависимости тормозного момента от скорости и давления в тормозе, блок 11 вычисления скольжения и блок 12 воспроизведения функциональной зависимости скорости незатормаживаемого колеса от скорости движения транспортного средства. На чертеже также показана испытуемая система 13 с датчиком
14 скорости колеса и датчиком 15 давления в тормозе колеса.
Перед началом испытаний датчик 14 вводится в зацепление с имитатором 5 колеса. В блоки 7, 8 и 10 вводятся функциональные зависимости, коэффицинты моделирования и начальные условия, определяющие значения тормозного и сцепного моментов в имитаторах 3 и 4. В блок 12 вводятся функциональная зависимость и коэффициент моделирования, определяющие значение угловой скорости незатормаживаемого колеса.
Двигатель 1 раскручивает маховик-имитатор 2 до рассчитанного значения угловой скорости, моделирующей линейную скорость транспортного средства. Угловая скорость маховика-имитатора 2 измеряется связанным с ним датчиком 6, сигнал с которого воздействует на блок 12. Выходной сигнал с блока 12, пропорциональный заданному значению угловой скорости нетормозного колеса, поступает на один из входов блока 11, на другой вход которого поступает сигнал от датчика 6, связанного с имитатором 5 колеса. Блок 11 вычисляет текущее значение скольжения имитатора 5 по отношению к сигналу с блока 12 и воздействует на блок 7, моделирующий зависимость момента сцепления от величины скольжения.
Блок 8 вырабатывает сигнал, зависящий от угловой скорости маховика-имитатора 2 и моделирующий зависимость момента сцепления от скорости транспортного средства. Блок 9 перемножает выходные сигналы с блоков 7 и 8 и воздечЧствует на имитатор 3, в котором возникает механичес-кий момент, заставляющий имитатор 5 раскручиваться. По мере раскрутки имитатора 5 сигнал от связанного с ним датчика 6, поступающий на один из входов блока 11, возрастает. Величина скольжения, рассчитанного блоком 11, уменьшается, что приводит к уменьшению момента в имитаторе 3, а следовательно, и углового ускорения имитатора 5.
Когда угловая скорость имитатора 5 достигает величины, определяемой блоком 12, скольжение, а значит, и выходной сигнал блока 11 становятся равными нулю. Это вызывает уменьшение до нуля значения момента в имитаторе 3 и прекращение раскрутки имитатора 5. В .результате устанавливается дин мическое равновесие, при котором маховик-имитатор 2 и имитатор 5 вращаются с разными угловыми скоростями, соотношение которых пропорционально радиусу нетормозного колеса в начале процесса торможения.
Процесс испытаний начинается с включения тормозной системы 13. В тормозе системы 13 возрастает давление, которое через датчик 15 воздействует на блок 10. В блоке 10 вырабатывается управляющий сигнал на имитатор 4, величина которого определяется текущими значениями угловой скорости маховикаа 2 и давления в тормозе испытуе
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний системы управления торможением колес транспортного средства | 1983 |
|
SU1122533A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1979 |
|
SU867733A2 |
| Стенд для испытания системы управления торможением колес транспортного средства | 1983 |
|
SU1152837A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1979 |
|
SU867734A2 |
| Стенд для испытаний систем управления торможением колес транспортных средств и чувствительных элементов этих систем | 1980 |
|
SU901113A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1981 |
|
SU975478A2 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1978 |
|
SU776945A2 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935353A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935354A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1977 |
|
SU653157A1 |
