1
Изобретение относится к средствам транспортировки штучных грузов,в частности к шагающим конвейерам,и может быть испрльзовано в механизированных и автоматизированных поточных линиях, а также для транспортирования и рационального размещения громоздких и тяжелых грузов в складских и других производственных помещениях.
Известен шаговый конвейер для транспортирования штучных грузов, содержащий совершаадций возвратнопоступательное движение рабочий орган, выполненный в виде ряда шарнирно соединенных подвижных тележек, и подьемные устройства, выполненные в виде прорезиненкалх надувных рукавов flj
Наиболее близким к предлагаемому по технической сущности является шаговый конвейер, содержащий непрдвижную опору, подвижную опору в виде установленных на катках параллельных рукавов, имекмцих систему подвода рабочей среды и привод возвратно-поступательного перемещения подвижной опоры fzj t
Недостаток указанных конвейеров состоит в том, что конструкция этих конвейеров не позволяет изменять ориентацию перемещаемых изделий,что необходимо в .случаях, когда этб диктуется условиями технологического воздействия на эти изделия кпи условиями рационального размещения, в результате чего сужаются технологические возможности конвейера.
Цель изобретения - расошрение технологических возможностей -конвейера.
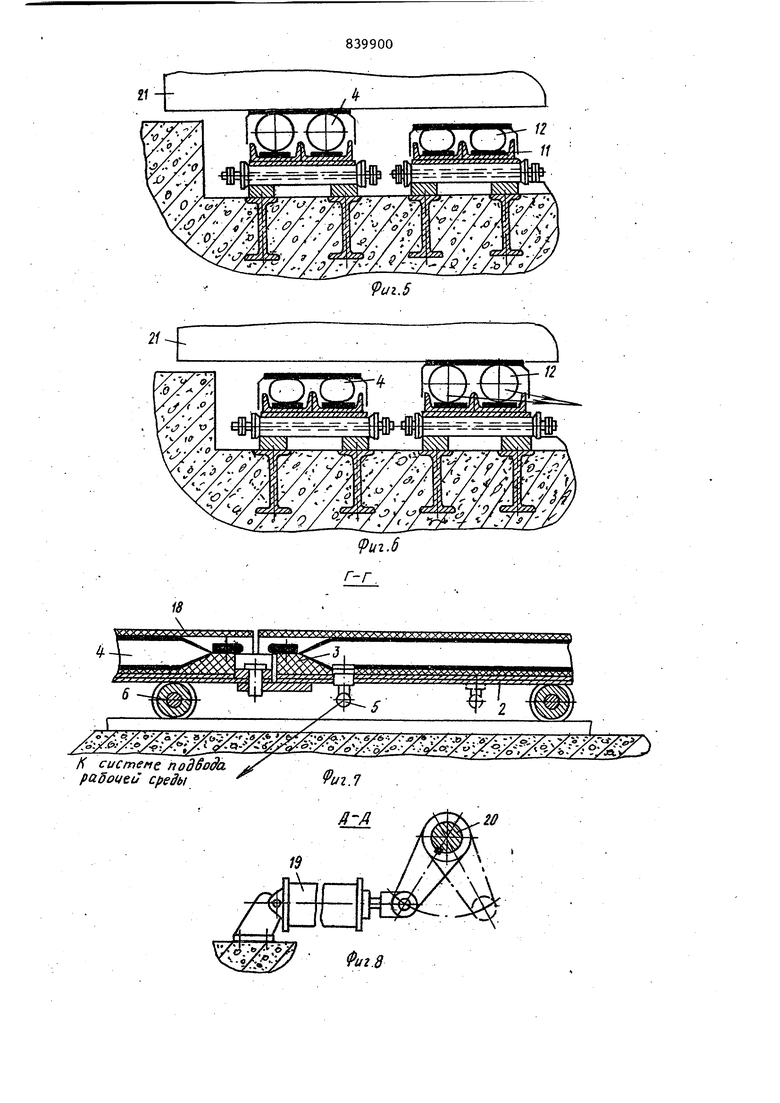
Указанная цель достигается тем, что конвейер снабжен дополнительной опорой, выполненной в виде кольцевого рукава, который имеет индиьлдуальHyio систему подвода рабочей среды, причем -дополнительная опора снабжена jwecTKo закрепленным на ней кронштейном с пазом и установлена на неподвижной опоре между параллельны рукавами с возможностью поворота, подвижная опора снабжена роликом, установленным с возможностью взаимодействия с пазом кронштейна. На фиг,1 изображен шагающий конвейер в плане (тонкими линиями по казаны перемещаемые изделия); на фиг.2 - сечение А-А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 сечение В-В на фиг..1 (подвижные опоры конвейера в мрме,нт нахождения изделий в состоянии покоя ; на фиг то.же, в момент нахождения издеЛИЙ в состоянии прямолинейного пере мещения; на фиг.6 - то же, в момент нахождения изделий в состоянии пово рота; на фиг.7 - разрез Г-Г на на фиг.8 - разрез Д-Д на фиг.1; на фиг.9 - узел 1 на фиг..1. Конвейер содержит неподвижную опору 1, вьшолненную, например, совместно с общим фундаментом. В углублениях неподвижной опоры смон тированы подвижные прямолинейная опора и кольцевая дополнительная опора (носители) конвейера . Прямолинейная подвижная опора включает в себя основания 2, снабженные по всей длине ложами 3, на которые уло жены в виде автономных секций параллельные рукава (шланги) 4. Количество и длина автономных секций диктуется конкретными условиями,в которых должен эксплуатироваться конвейер. При этом количество рукавов, уложенных в каждой секции, зависит от веса транспортируемого изделия, диаметра рукава, нагнетаемого в рукав давления и от длины контакта рукава с опорной плоскость перемещаемого изделия. Каждая секци рукавов снабжена штуцером 5,свя занным с системой подвода рабочей среды - сжатого воздуха. Прямолинейная подвижная опора своими основаниями 2 опирается на катки 6, снабженные прямолинейными сепараторами 7 и взаимодействующие с пр ямрлинейными рельсами 8 фундамента. Прямолинейная подвижная опора снабжена роликом 9. Кольцевая подвижная дополнительная опора установлена на неподвижной опоре 1 между параллельными рукавами 4 и включает в себя кольцевое основание 10, снабженное ло«г жем 1, на которое по периметру кольца уложены-рукава 12. Кольцевая опора своим основанием 10 опирается на катки 13 и центрируется относительно жес.тко закрепленной на фундаменте оси 14 с возможностью относительно нее. Катки 13 снабжены кольцевым сепаратором 15 и взаимодействуют с -кольцевыми рельсами 16 фундамента. На основании 10 закреплен кронштейн 17, открытый паз которого взаимодействует с роликом 9 прямолинейной подвижной опоры. Следовательно , возвратно-поступательное перемещение прямолинейной опоры вызывает возвратно-поворотное перемещение кольцевой опоры относительно оси 14. Рукава.подвижной кольцевой опоры имегот индивидуальную систему подвода рабочей среды - сжатого воздуха. Рукава прямолинейной и кольцевой подвижных опор для предотвращения повреждений укрыты соответственно прямолинейными и кольцевым к ожухами 18.Подвод сжатого воздуха в каждую автономную секцию прямолинейной подвижной опоры, а также в кольцевую опору производится от индивидуальных воздухораспределителей, смонтированных на пульте управления конвейером (не показан). Перемещение подвижных опор осуществляется от привода возвратнопоступательного перемещения, например, силовыми цилиндрами 19 через валы - синхронизаторы 20, которые соединеш с основания 2. В зависимости от конкретных условий конвейер может быть снабжен несколькими кольцевь№1и подвижными опорами. В состоянии покоя изделия 21 опираются на неподвижную опору 1. Конвейер работает следующим образом. Сжатый воздух подается в секции рукавов 4 прямояинейной опоры или в рукаеа 12 кольцевой опоры. При достижении необходимого давления площадь сечения рукавов, увеличивается, и изделия приподнимаются над неподвщсной опорой. Затем включается привод перемещения подвижных опор, которые совершают рабочий ход, в результате чего изделия прямолинейно перемещаются или поворачиваются на один шаг. Далее сжатый воздух выпускается из соответствующих рукаBOB, последние сжимаются, плавно опуская изделия на неподвижную опор после чего поступает команда на реверс привода перемещения, и подви ные опоры, совершая холостой ход, возвращаются под изделиями в исходн положение. При этом возможны четьфе основны режима работы конвейера. Режим синхронного ритма прямолинейного перемещения изделий по всей длине конвейера (работа в режиме обычного шагающего конвейера , при котором сжатый воздух подается одновременно во все секции рукавов 4 прямолинейной опоры конвейера. В результате за один рабочий ход прямолинейной опоры все изделия одн временно перемещаются на один шаг в необходимом направлений. При таком режиме работы расстояния между изделиями в процессе их перемещения т.е. L con остаются постоянными, L const ( кольцевая опора, а и рукав а которой сжатый воздух не подается, совершает возвратно-поворотное движение под изделиями}. Режим изменяющегося ритма прямол нейного перемещения изделий на отдельных участках конвейера, при котором сжатый вохдух подается толь ко в секции рукавов, расположенные под изделиями, прямолинейное перемещение которых необходимо обеспечить в данньй момент времени. Секции рукавов прямолинейной и кольцевой опор, в которые воздух не подается, во время перемещения проходят под изделиями, находящимися в состоянии покоя на неподвижной опоре. Например, надо переместить изделие, находящееся в зоне средней секции рукавов прямолинейной опоры конвейера фиг.1 , оставив крайние изделия в состоянии пОкоя, Для этог воздух подается только в среднюю секцию рукавов.В результате за один цикл работы конвейера осуществляет ся перемещение только среднего изп делия в необходимом направлении, т.е. при увеличении L уменьшается Lj и наоборот. Режим изменения направления прямолинейного перемещения изделий ка отдельных участках конвейера, при котором сжатый воздух пооче1 едао подают в определенные секции рукаво 4 перед каждым измен|ением направле0«ния перемещения прямолинейной опоры. Например, необходимо крайние изделия переместить влево,а среднее вправо фиг.I). Для этого перед началом перемещения прямолинейной опоры влево воздух подают только в крайние секции. По завершении кода влево воздух из крайних секций выпускается, а затем подается в среднюю секцию. При этом ход прямолинейной опоры вправо сопровождается перемещением среднего изделия вправо. При такой работе конвейера каждое перемещение прямолинейной опоры является рабочим ходом конвейера, т.е. исключаются по.т«ри времени на совершение холостого хода. Режим изменения ориентации изделия, когда изделие перемещают в зону кольцевой опоры,а затем сжатьй воздух подают только в рукава 12 кольцевой опоры. За один рабочий ход конвейера изделие поворачивается относительно ОСИ 14 на один угловой шаг. Использование предлагаемого изобретения обеспечивает возможность широко маневрировать прямолинейным перемещением изделий и, вместе с тем, изменять ориентацию перемещаемых изделий. Кроме того, малая металлоемкость, простота и компактность конструкции конвейера при большой грузоподъемности снижает его стоимость. Управление конвейером легко поддается автоматизации. Формула изобретения Шагающий конвейер, содержащий неподвижную опору, подвижную опору в виде установленных на катках параллельных рукавов, имеюших систему подвода рабочей среды и привод возвратно-поступательного перемещения подвижной опоры, отли чаю щи йс я тем, что, с целью расширения технологических возможностей конвейера, он снабжен дополнительной опорой, рыпопиенной в виде кольцевого рукава, который имеет индивидуальную систему подвода рабочей среды, причем дополнительная опора снабжена жестко закрепленным на ней кронштейном с пазом и установлена на неподвижной опоре между параллельными рукавами с возможностью поворота, а подвижная 78399 опора снабжена роликом, установленным с возможностыо взаимодействия с пазом кронштейна. Источники информации, принятые во внимание при экспертизе 008 1. Авторское свидетельство СССР № 153226, кл. В 65 G 25/04, 1962. 2. Авторское свидетельство СССР 309501, кл. В 65 G 25/04, 1969 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1980 |
|
SU956377A1 |
| Шагающий конвейер | 1980 |
|
SU948797A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Эксцентриковый механизм подъема-опускания подвижной рамы шагающего конвейера | 1990 |
|
SU1795953A3 |
| Шагающий конвейер | 1977 |
|
SU745806A1 |
| Агрегат для выемки крутых пластов угля | 1982 |
|
SU1089271A1 |
| Способ открыто-подземной разработки пологого угольного пласта и шагающая крепь для его осуществления | 2023 |
|
RU2794689C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Установка для технического обслуживания автомобилей | 1980 |
|
SU935344A2 |

../J-X1 W .. Фаг.З
9иг.5 /г системе подбора (eu
Фиг. 9
10
