1
Изобретение относится К транспортной технике, в частности к способам и устройствам гравитационного транспортирования изделий, и может быть использовано для транспортирования изделий в технологическом оборудовании и между обработьшающими стенками. .
Известно шаговое гравитационное устройство для транспортирования изделий, содержащее неподвижные направляющие и подвижную направляющу с толкателями и эксцентриковый привод D1
Наиболее близким к изобретению по технической сущности является шаговое гравитационное устройство для транспортирования изделий, содержащее неподвижные направляющие и подвижную направляющую, установленную с возможностью возвратнопоступательного перемещения- в вер сцкальной плоскости L2.
Однако известные устройства не обеспечивают транспортирование изделий различной конфигурации, т.е. сужается номенклатура транспортируемых изделий.
Цель изобретения - расширение номенклатуры транспортируемых изделий.
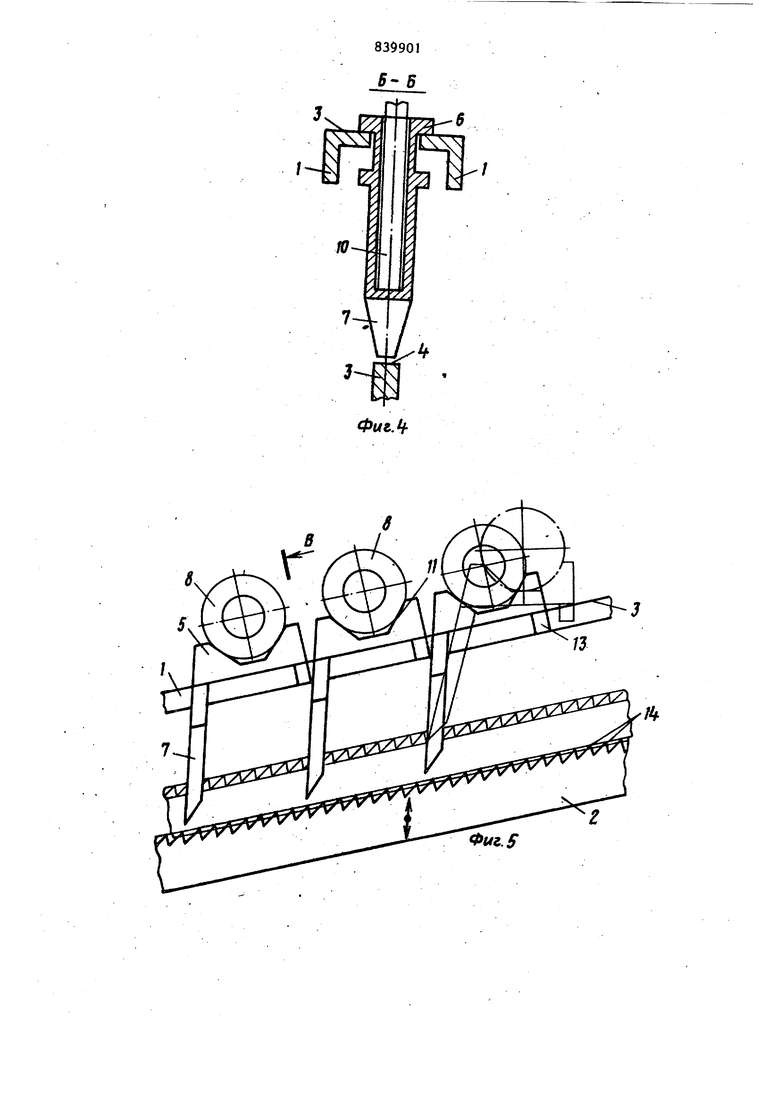
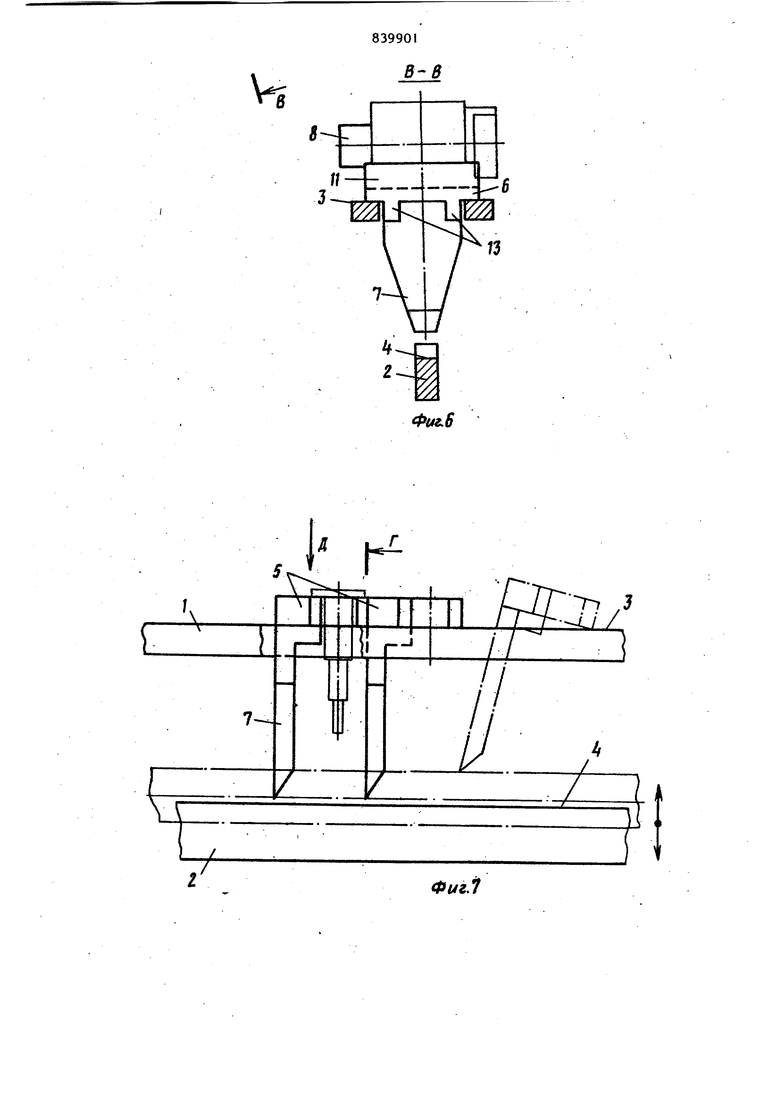
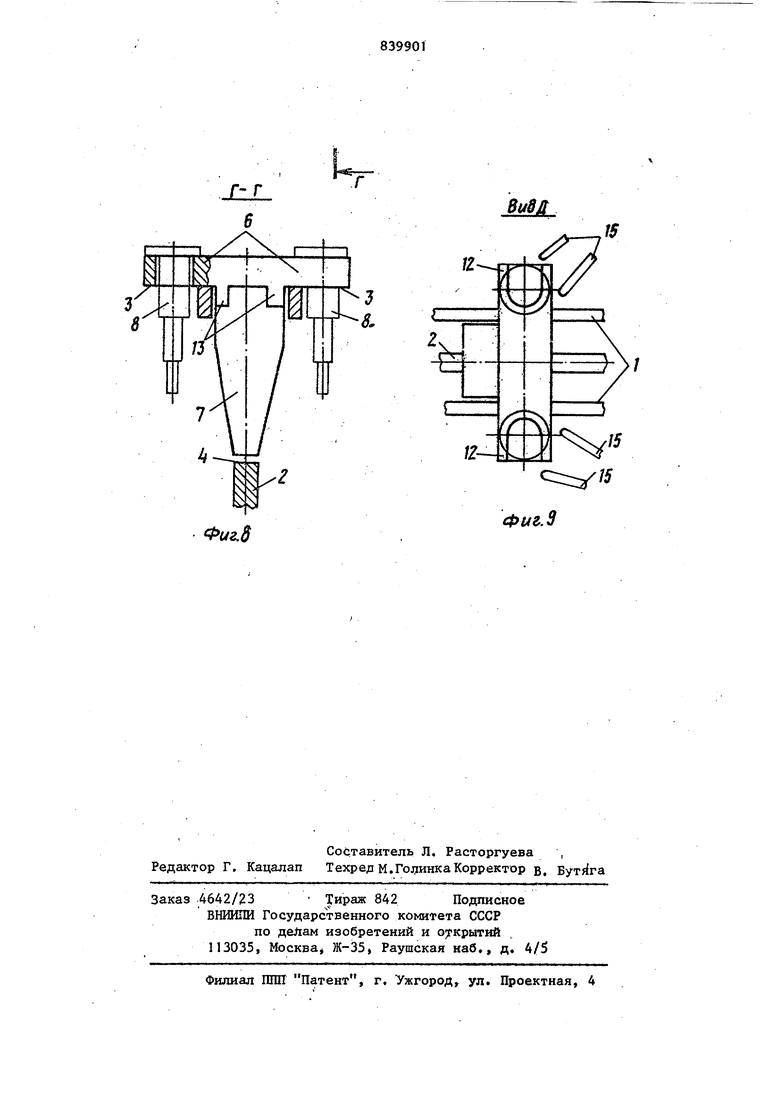
Поставленная цель достигается тем, что устройство снабжено несущими приспособлениями, каждое из которых имеет заплечики, хвостовик и захват для изделий, причем несущее приспособление установлено на неподвижных направляющих посредством заплечиков с возможностью взаимодействия хвостовика с подвижной напрайляющей, при этом хвостовик смещен относительно центра тяжести приспособления по продольной оси устройства в сторону, противоположную направлению транспортирования, а захват смещен относительно хвостовика по продольной оси устройства в направлении транспортирования. Кроме того захваты несущих присп соблений выполнены в виде призм, ви лок и т.д. . при этом, с целью повьшения надежности работы, йесущие приспособл ния выполнены с направляющими выстуэтами, расположенными между неподвижньмл направляющими. На фиг.1 изображено устройство, общий ввд; на фиг.2 - разрез А-А на фиг.I; на фиг.3 - вариант устрой ства для транспортирования изделий по горизонтальным направляющим; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - вариант устройства для тран портирования изделий вверх по наклон ным направляющим; на фиг.6 - разрез В-В на фиг.5; на фиг.7 - вариант для транспортирования нескольких изделий в одном несущем приспособлении; на фиг.З - разрез Г-Г на фиг.7; на фиг.9 - вид Д на фиг.З. Шаговое гравитационное устройств содержит неподвижные направляющие 1 и подвижную направляющую 2. Направляющие 1 и 2 могут быть вьшолнены горизонтальными и наклонными. Неподвижные направляющие I и подвижная направляющая 2, имеют опорные поверхности 3 и 4, соответственно. На направляющих 1 и 2 размещены одно за другим отдельные несущие приспособления 5. Каждое не сущее Приспособление 5 имеет опорны части в виде заплечиков 6, контактиРУЮ1ЧНХ с опорными поверхностями 3 направляющих I, ограничивающими смещение приспособлений вниз, и в виде хвостовика 7, контактирующего с опор ной поверхностью 4 направляющих 2. Несущее приспособление 5 снабжено также захватом для изделий 8, который может быть вьшолнен в виде отверстия 9 (фиг.I и 2) , полости 10 в теле приспособления 5 (фиг.З и 4) призмы II (фиг.З и 6) или вилок 12 (фиг.7-9 .Оорма выполнения захвата зависит от формы транспортируемог изделия. Так например для транспо тирования изделий неправильной формы может применяться приспособление 5 с захватом в виде полости 10, а для транспортйрования изделий типа валиков - приспособление 5 с захватом в виде призмы 11. Хвостовик 7 каждого несущего приспособления 5 смещен относительно центра тяжести приспособления 0 , имеющего вес Р, на некоторую величину 0 (фиг.). Направляющая 2 выполнена поступательно подвижной относительно направляющих 1 в вертикальной плоскости. Дпя предотвращения разворота несущих приспособлений 5 несущие приспоосбления могут иметь направляющие выступы .13, расположенные между направляющими 1. Эти выступы 13 могут быть смещены относительно хвостовика 7 по продольной оси лотка (фиг. 1, 5 и 7} . Проскальзывание хвостовика 7 приспособлений 5 в месте контакта их с опорной поверхностью 4 направляющей 2 устраняется тем, что опорные поверхности 3 направляющих 1 выполнены из материала, имеющего коэффициент трения с материалом заплечиков 6 несущих приспособлений 5 меньше, чем коэффициент трения материала хвостовиков 7 приспособлений с материалом опорной поверхности 4 направляющей 2. Например, опорные поверхности заплечиков 6 могут быть вьшолнены из антифрикционного самосмазывающегося материала или фторопласта, а все другие элементы устройства могут быть выполнены из.стали. Эта же задача решается, если опорная поверхность 4 направляющей 2 выполнена с упорными зубьями 14, что повышает надежность транспортирования особенно при перемещении изделий вверх по наклонным направляющим. Устройство может иметь механизм для разгрузки приспособлений в виде прутковых лотков 15 (фиг.9). Транспортирование изделий осуществляется следующим образом. Изделия 8 весом Р , имеющие центр тяжести в точке 0, устанавливают на захваты 9, 10, 11 или 12 соответствующих несуа их приспособлений 3 (фиг. 1,3,5 и 7) Р|, размещенных одно за другим на направляющих и имекщих центр тяжести в точке СЦ. Несущие приспособления 5 опираются заплечиками 6 об опорные поверхности 3 направляющих I, удерживающих приспособления от смещения вниз. При-. чем установку изделий 8 на захваты приспособлений осуществляют со смещением общего центра тяжести О каждого приспособления 5 с изделием 8 в направлении транспортирования на некоторую величину Ъ относительно места контакта хвостовика 7 с опорной
поверхностью 4 направляющей 2 (фиг. Г Это обеспечивается тем, что хвостови 7 каждого приспособления 5 смещен по продольной оси устройства относительно центра тяжести Oj приспособления в сторону, противоположную направлению транспортирования на некоторую величину а, а захват 9, 10, 11 или 12 смещен относительно хвостовика 7 в направлении транспортирования, обеспечивая тем самым смещение действия общего веса R приспособления 5 и изделия 8 в направлении транспортирования в точку 0.
После установки изделий8 на приспособления 5 направлякщую 2 приводят в возвратно-поступательное движение относительно направляющих I в вертикальной плоскости, при этом периодически производится изменение расстояния между опорными поверхностями 3 направляюрдих I и опорной поверхностью 4 направляющей 2. При движении направляющей 2 вверх опорная поверхность 4 входит в контакт с хвостовиками 7, приподнимает приспособления 5 и вьюодит заплечики 6 приспособлений из контакта с опорными поверхностями 3 направляклцих 1. В результате, под действием общего веса R приспособления 5 и изделия 8 возникает момент М,равный произйедению R-B, где В - плечо или расстояние, на которое смещен общий центр тяжести О относительно хвостовика 7. Под действием момента М происходит поворот приспособлений 5 на угол и вокруг точек контакта хвостовиков 7 с опорной поверхностью 4 направлякицей 2, а общий центр тяжести перемещается в направлении транопортирвоания в точку 0,, т.е. расстояние между общим центром тяжести О, .и местом контакта хвоетовика 7 с направляющей 2 увеличивается на величину сУ. Все приспособления 5 с изделиями 8, наклоняются также на угол оС При опускании направляющей 2 появляется контакт заплечиков 6 с опорными поверхностями 3 направляющих 1 и приспособлени .занимают положение, смещенное на величину S относительно первоначального положения. .
Таким образом, при возвратно-по ступательном перемещении направляющей 2 относительно направляняцЬс J
происходит перемещение приспособлений 5 с изделиями путем периодического изменения расстояния, а точнее увеличения расстояния между общим центром т.яжести О приспособлений 5 с изделиями 8 и мест контакта хвостовиков 7 с опорной поверхностью 4 направляющей 2. Следовательно, перемещение изделий осуществляется под действием общей силы тяжести R,
В зависимости от формы т|ранспортируемык изделий захваты приспособлений 5 могут быть в виде отверстий 9, полостей 10, призм 11 или вилок 12. С помощью отдельных приспособлеНИИ 5 можно перемещать по два или несколько изделий. Например, при выполнении двух захватов в виде вилок 12 на одном несущем приспособлении 5 можно транспортировать сразу два изделия. Разгрузку изделий можно производить с помощью прутковых лотков 15, установленных под углом к устройству. При этом прутки лотков при подходе к ним приспособлений 5 с изделиями 8 снимают последние и подают, например, к обрабатывающим станкам.
Приспособления 5, незагруженные изделиями 8, могут также перемещатьс в устройстве по горизонтальным и наклонным вверх направляющим в свсяз с тем, что центр тяжести 0 приспособлений 5 смещен относительно хвоствика 7 на некоторую величину о( в направлении транспортирования. Это перемещение незагруженных приспособлений 5 необходимо для подачи их к композициям загрузки (не показаны) и от позиций разгрузки изделий с приспособлений (фиг.7 и 9) без дополнительных механизмов перегрузки.
Изобретение обеспечивает надежное транспортирование изделий любой форм по горизонтальным и наклонным вверх направляющим.
Формула изобретения
1. Шаговое гравитационное устройство для транспортирования изделий, содержащее неподвижные направляющие и подвижную направляющую, установленную с возможностью возвратно-поступательного перемещения в вертикалной плоскости, отличающеес я те, что, с целью расширения номенклатуры транспортируемых издеЛИЙ, устройство снабжено несущими приспособлениями, каждое из которых имеет заплечики хвостовик и захват для изделий, причем несущее приспособление установлено на неподвижных направлянщих посредством заплечиков с возможностью взаимодействия хвосто вика с подвижной направляющей, при этом хвостовик смещен относительно центра тяжести приспособления по продольной оси устройства в сторону, противоположную направлению tpaHcпортирования, а захвят смеицеи относи тельно хвостовика по йродольной оси устройства в направлении транспортирования . 2, Устройство по П.1, от л ичающееся тем, что захваты 18 несущих приспособлений выполнены в виде призм. 3.Устройство по п.Г, отличающееся тем, что захваты несущихприспособлений выполнены в виде вилок. 4.Устройство по п.t, отличающееся тем, что, с целью повышения надежности работы, несущие приспособления выполнены с направляющими выступами, расположенными между неподвижш1ми направляющими. Источники информации, принятые во внимание при экспертизе Ь Патент ША № 3613869, Ю1. 198-220, опублик. 1971. 2. Авторское свидетельство СССР 695910, кл. В 65 G 25/08, 1978 (прототип).
839901
А-А
Фмг.

| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНОЛОГИЧЕСКИЙ ШАГОВЫЙ КОНВЕЙЕР | 2001 |
|
RU2198834C2 |
| Шаговый конвейер | 1980 |
|
SU1023748A1 |
| Шаговый конвейер-накопитель | 1980 |
|
SU960098A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Роликовый стенд | 1976 |
|
SU679362A1 |
| Способ транспортирования изделий с цилиндрическими опорными поверхностями шагающим конвейером | 1988 |
|
SU1623922A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| СПОСОБ СОЕДИНЕНИЯ КОЛЕЙНОГО МОСТА С МЕХАНИЗМОМ УКЛАДКИ МОСТОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2063495C1 |
| Устройство для межоперационного транспортирования детален к станкам | 1941 |
|
SU66996A1 |
| Устройство для монтажа и демонтажа деталей | 1984 |
|
SU1291351A1 |

Фиг..5
w
5 чй Г{гъ v
т
Гfl-ttui
//
4
/
V /
Фиг.1
Г-Г
Фиг,§
ВивЛ
Фиг. 9
