Изобретение относится к способу транспортирования изделий шагающим конвейером, а именно транспортным средством для перекладки обрабатываемых изделий с позиции на позицию, конкретнее конвейер встраивается в моечное оборудование (машины, автоматы, устройства), устанавливаемое в поточных и автоматических линиях механической обработки валов для струйной межоперационной и окончательной обработки деталей (валов) моющими растворами.
Цель изобретения - повышение производительности и расширение технологических возможностей способа путем обеспечения поворота изделий в процессе транспортирования.
Способ транспортирования изделий с цилиндрическими опорными поверхностями
шагающим конвейером включает подъем изделий посредством подвижной рамы с опорными призмами для изделий и горизонтальными участками между опорными призмами относительно неподвижной рамы с опорными призмами для изделий и горизонтачь- ными участками между опорными призмами, перемещение изделии на подвижной раме в прямом продольном направлении, опускание подвижной рамы ниже неподвижной рамы и перемещение подвижной рамы в обратном продольном направлении, при этом при перемещении подвижной рамы в прямом продольном направлении осуществляют поворот изделий при взаимодействии их цилиндрических опорных поверхностей с горизонтальными участками неподвижной рамы На фиг. 1 изображен шагающий конвейер, встроенный в моечную машин) в исО
со со
N3 N5
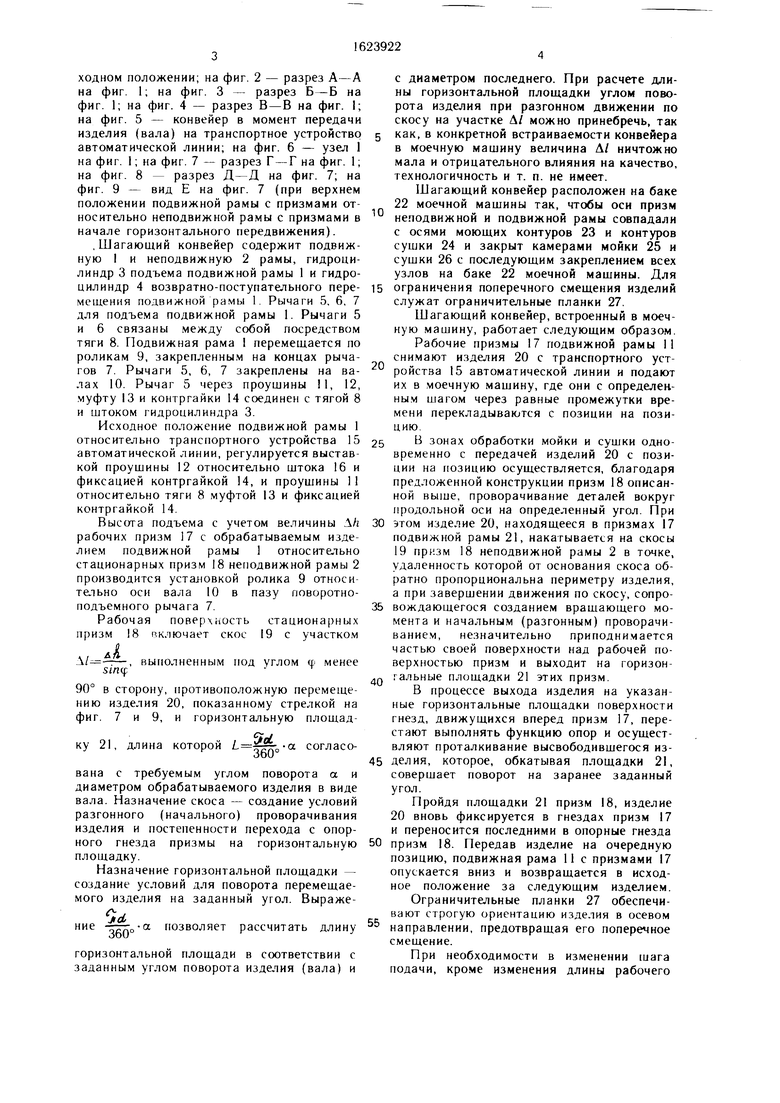
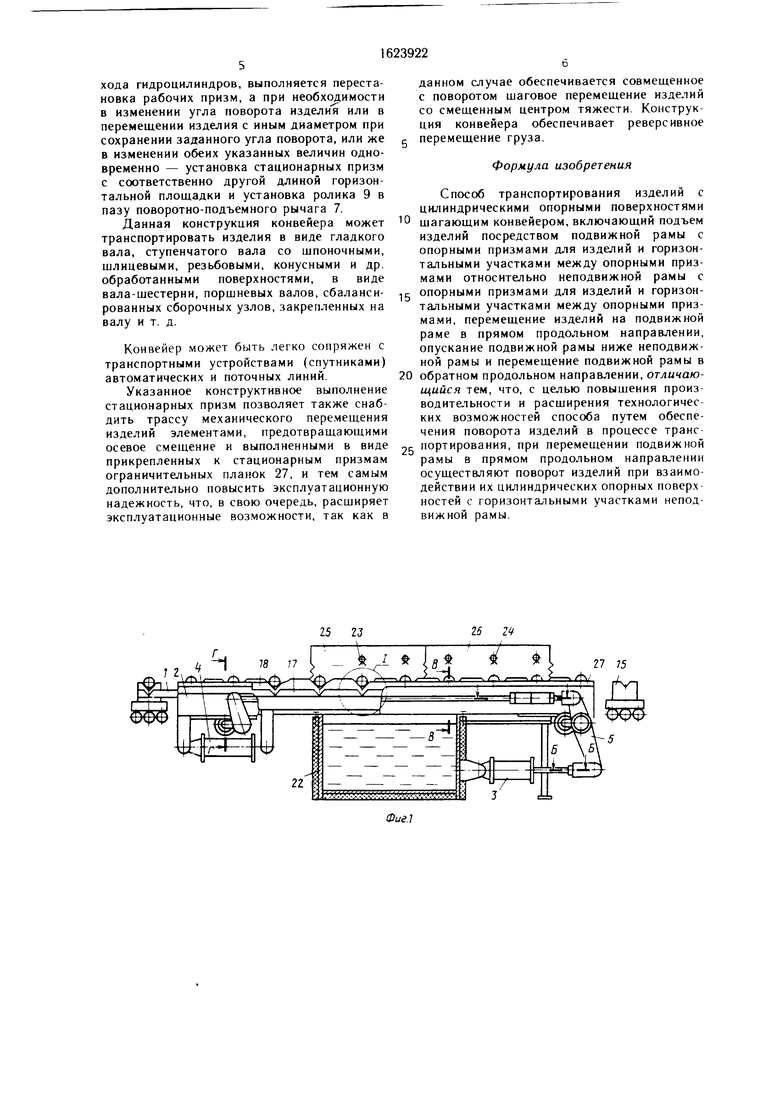
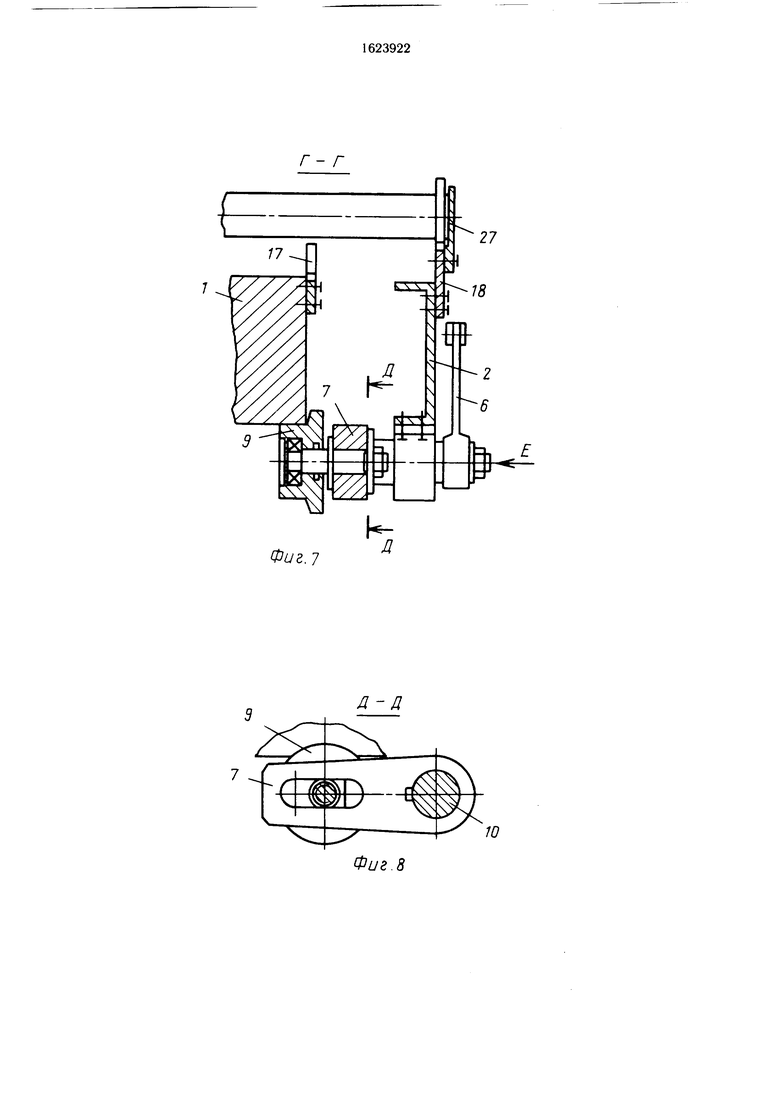
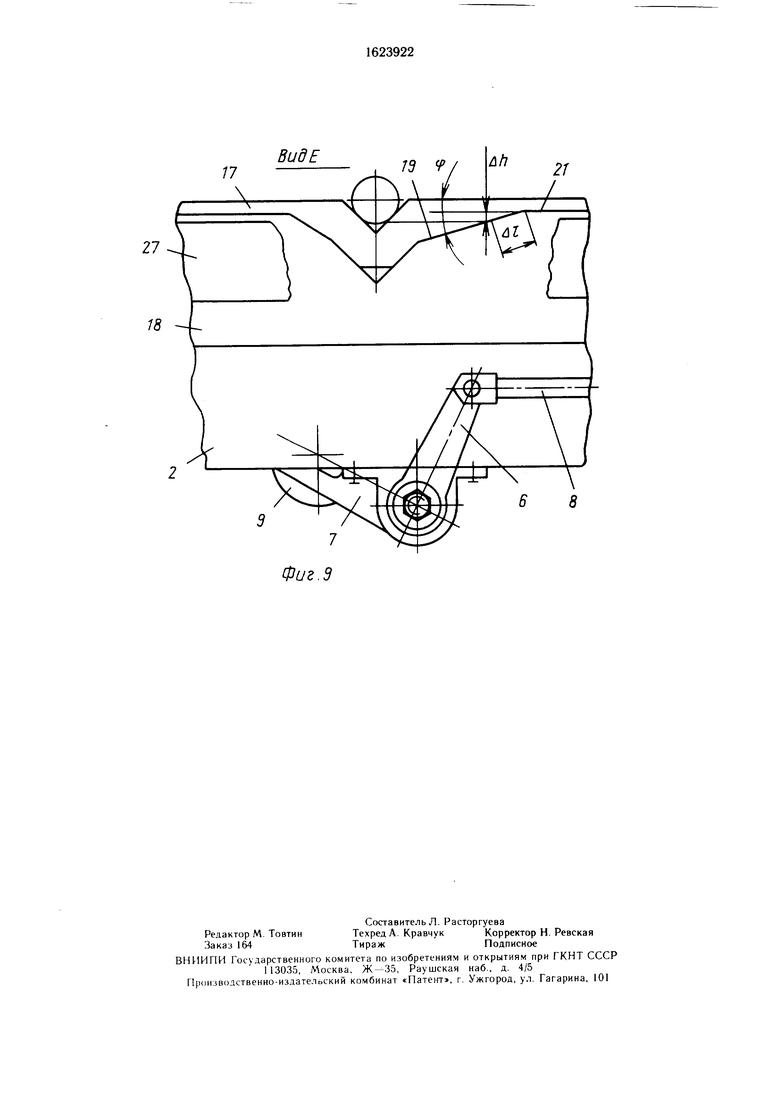
ходном положении, на фиг 2 - разрез А-А на фиг 1, на фиг 3 - разрез Б-Б на фиг 1, на фиг 4 - разрез В-В на фиг 1, на фиг 5 - конвейер в момент передачи изделия (вала) на транспортное устройство автоматической линии, на фиг 6 - узел 1 на фиг 1, на фиг 7 - разрез Г - Г на фиг 1, на фиг 8 - разрез Д-Д на фиг 7, на фиг 9 - вид Е на фиг 7 (при верхнем положении подвижной рамы с призмами от носительно неподвижной рамы с призмами в начале горизонтального передвижения)
Шагающий конвейер содержит подвижную 1 и неподвижную 2 рамы, гидроцилиндр 3 подъема подвижной рамы 1 и гидроцилиндр 4 возвратно-поступательного перемещения подвижной рамы 1 Рычаги 5, 6, 7 для подъема подвижной рамы 1 Рычаги 5 и 6 связаны между собой посредством тяги 8 Подвижная рама 1 перемещается по роликам 9, закрепленным на концах рычагов 7 Рычаги 5, 6, 7 закреплены на валах 10 Рычаг 5 через проушины 11, 12, муфту 13 и контргайки 14 соединен с тягой 8 и штоком гидроцилиндра 3
Исходное положение подвижной рамы 1 относительно транспортного устройства 15 автоматической линии, регулируется выстав кой проушины 12 относительно штока 16 и фиксацией контргайкой 14, и проушины 11 относительно тяги 8 муфтой 13 и фиксацией контргайкой 14
Высота подъема с учетом величины h рабочих призм 17 с обрабатываемым изде лием подвижной рамы 1 относительно стационарных призм 18 неподвижной рамы 2 производится усталовкой ролика 9 относи тельно оси вала 10 в пазу поворотно- подъемного рычага 7
Рабочая неверность стационарных призм 18 пключает скос 19 с участком а
1-, выполненным под углом и. менее
90° в сторону, противоположную перемеще нию изделия 20, показанному стрелкой на фиг 7 и 9, и горизонтальную площад
Ж- „j .., w,,.,.u ,,„к„,. - -а согласоoOU
вана с требуемым углом поворота а и диаметром обрабатываемого изделия в виде вала Назначение скоса - создание условий разгонного (начального) проворачивания изделия и постепенности перехода с опорного гнезда призмы на горизонтальную площадку
Назначение горизонтальной площадки - создание условий для поворота перемещаемого изделия на заданный угол Выраже
О
ние позволяет рассчитать длину
горизонтальной площади в соответствии с заданным углом поворота изделия (вала) и
с диаметром последнего. При расчете длины горизонтальной площадки углом поворота изделия при разгонном движении по скосу на участке Д/ можно принебречь, так
как, в конкретной встраиваемости конвейера в моечную машину величина Л/ ничтожно мала и отрицательного влияния на качество, технологичность и т. п не имеет
Шагающий конвейер расположен на баке 22 моечной машины так, чтобы оси призм неподвижной и подвижной рамы совпадали с осями моющих контуров 23 и контуров сушки 24 и закрыт камерами мойки 25 и сушки 26 с последующим закреплением всех узлов на баке 22 моечной машины. Для
5 ограничения поперечного смещения изделий служат ограничительные планки 27
Шагающий конвейер, встроенный в моечную машину, работает следующим образом Рабочие призмы 17 подвижной рамы 11 снимают изделия 20 с транспортного уст
0 ройства 15 автоматической линии и подают их в моечную машину, где они с определенным шагом через равные промежутки времени перекладываются с позиции на позицию
5 В зонах обработки мойки и сушки одно временно с передачей изделий 20 с позиции на позицию осуществляется, благодаря предложенной конструкции призм 18 описанной выше, проворачивание деталей вокруг продольной оси на определенный угол При
0 изделие 20, находящееся в призмах 17 подвижной рамы 21, накатывается на скосы
19призм 18 неподвижной рамы 2 в точке, удаленность которой от основания скоса обратно пропорциональна периметру изделия, а при завершении движения по скос, сопро
5 вождающегося созданием вращающего момента и начальным (разгонным) проворачиванием, незначительно приподнимается частью своей поверхности над рабочей поверхностью призм и выходит на горизон
Q гальные площадки 21 этих призм
В процессе выхода изделия на указан ные горизонтальные площадки поверхности гнезд, движущихся вперед призм 17, перестают выполнять функцию опор и осуществляют проталкивание высвободившегося из5 делия, которое, обкатывая площадки 21, совершает поворот на заранее заданный угол
Пройдя площадки 21 призм 18, изделие
20вновь фиксируется в гнездах призм 17 и переносится последними в опорные гнезда
0 призм 18 Передав изделие на очередную позицию, подвижная рама 11 с призмами 17 опускается вниз и возвращается в исходное положение за следующим изделием
Ограничительные планки 27 обеспечивают строгую ориентацию изделия в осевом направлении, предотвращая его поперечное смещение
При необходимости в изменении шага подачи, кроме изменения длины рабочего
5
хода гидроцилиндров, выполняется перестановка рабочих призм, а при необходимости в изменении угла поворота изделия или в перемещении изделия с иным диаметром при сохранении заданного угла поворота, или же в изменении обеих указанных величин одновременно - установка стационарных призм с соответственно другой длиной горизонтальной площадки и установка ролика 9 в пазу поворотно-подъемного рычага 7.
Данная конструкция конвейера может транспортировать изделия в виде гладкого вала, ступенчатого вала со шпоночными, шлицевыми, резьбовыми, конусными и др. обработанными поверхностями, в виде вала-шестерни, поршневых валов, сбалансированных сборочных узлов, закрепленных на валу и т. д.
Конвейер может быть легко сопряжен с транспортными устройствами (спутниками) автоматических и поточных линий.
Указанное конструктивное выполнение стационарных призм позволяет также снабдить трассу механического перемещения изделий элементами, предотвращающими осевое смещение и выполненными в виде прикрепленных к стационарным призмам ограничительных планок 27, и тем самым дополнительно повысить эксплуатационную надежность, что, в свою очередь, расширяет эксплуатационные возможности, так как в
данном случае обеспечивается совмещенное с поворотом шаговое перемещение изделий со смещенным центром тяжести. Конструкция конвейера обеспечивает реверсивное перемещение груза.
Формула изобретения
Способ транспортирования изделий с цилиндрическими опорными поверхностями шагающим конвейером, включающий подъем изделий посредством подвижной рамы с опорными призмами для изделий и горизонтальными участками между опорными призмами относительно неподвижной рамы с
опорными призмами для изделий и горизонтальными участками между опорными призмами, перемещение изделий на подвижной раме в прямом продольном направлении, опускание подвижной рамы ниже неподвижной рамы и перемещение подвижной рамы в
0 обратном продольном направлении, отличающийся тем, что, с целью повышения производительности и расширения технологических возможностей способа путем обеспечения поворота изделий в процессе транс(- портирования, при перемещении подвижной рамы в прямом продольном направлении осуществляют поворот изделий при взаимодействии их цилиндрических опорных поверхностей с горизонтальными участками неподвижной рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер для перемещения труб | 1991 |
|
SU1838218A3 |
| Конвейерная моечная машина | 1988 |
|
SU1593715A1 |
| Шаговый конвейер автоматической линии | 1984 |
|
SU1234311A1 |
| Шагающий конвейер | 1977 |
|
SU716920A1 |
| Шагающий конвейер | 1980 |
|
SU948797A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Шагающий конвейер-перегружатель | 1980 |
|
SU929513A1 |
| Шагающий конвейер | 1978 |
|
SU742287A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
Изобретение относится к способу транспортирования изделий шагающим конвейером. Конвейер встраивается в моечное оборудование и используется в поточных и автоматических линиях механической обработки валов моющими растворами. Цель повышение производительности и расширение технологических возможностей способа путем обеспечения поворота изделий (И) в процессе транспортирования. Для этого осуществляют подъем И посредством подвижной рамы с опорными призмами (ОП) для И и горизонтальными участками между ОП относительно неподвижной рамы с ОП для И и горизонтальными участками межд) ОП Затем производят перемещение И на подвиж ной раме в прямом продольном направлении. При этом осуществляют поворот И при взаимодействии их цилиндрических опорных поверхностей с горизонтальными участками неподвижной рамы После этого опускают подвижную раму ниже неподвижной рамы и перемещение подвижной рамы в обратном продольном направлении 9 ил 1C (Л
25 ZJ
26 24
27 75
Фиг.1
Б-Б
1В
Щ
Фиг.З
Фиг. Ц
Г - Г
Фиг.7
д-д
Фиг.8
77
ВидЕ
18
Фиг. 9
2Г
8
| Устройство для загрузки шагового конвейера | 1981 |
|
SU988687A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
