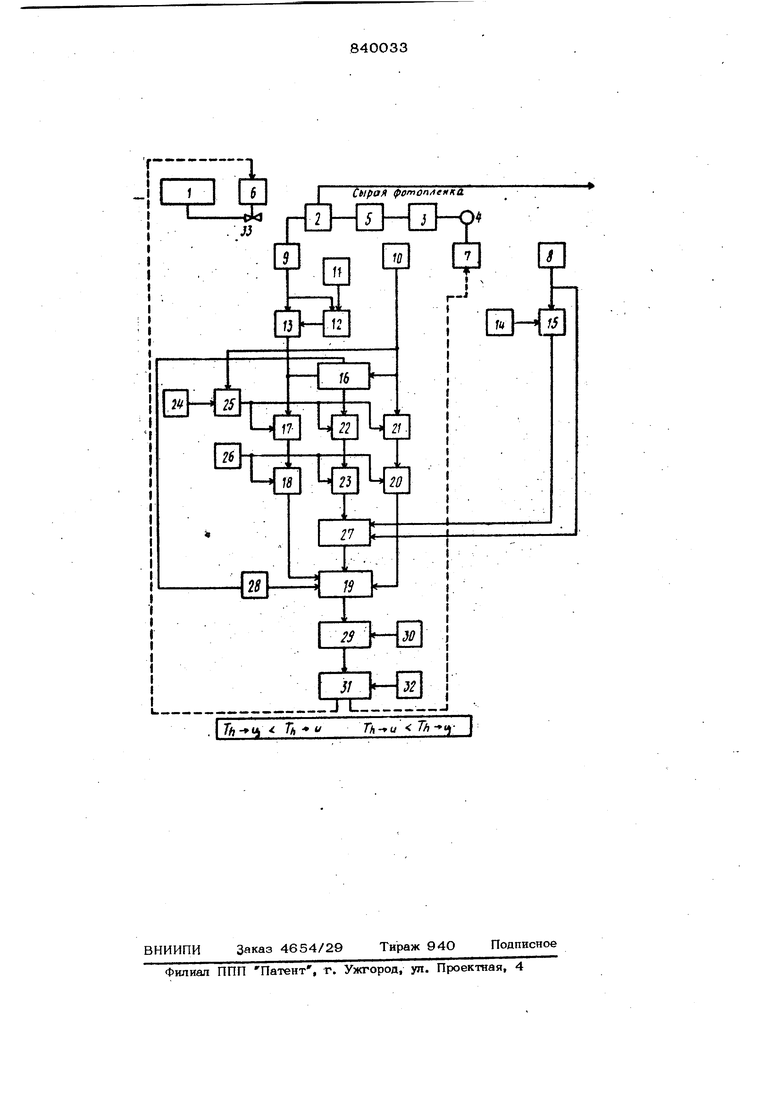
Изобретение относится к технике автоматического управления технологическими процессами, в частности процессом нанесения фотоэмульсии на движущуюся основу кинофотоматериалов. Устройство может быть использовано в бумажной промышлен ности и полиграфии, а также в других отраслях, где Требуется наносить жидкостные слои с высокой точностью. В известном устройстве для нанесения равномерных по высоте слоев .жидкости на гибкие движущиеся подложки, обеспечивающее жесткую функциональную связь (синхронизацию) между мгнсюенными значениями расхода жидкости, подаваемсА не подложку, скорости протяжки подложки в точке нанесения и содержание контроп1фуемой компоненты жишсости в единице площади ее наноса на гибкую подложку 1 в 2 Это содержание контролируемой компоненты жидкости, в конечном счете, определяет качество наносимого слоя на гнбкую подложку. Однако устройства не обеспечивают такой синхронизации, поскольку имеют элементы, управляющие отдельно скоростью движения подложки и расходом жидкости и не связанные между собой. Наиболее близким по технической сущности к предлагаемому изобретению является устройство, включающее термостат для хранения жидкости, соединенный с клапаном подачи жидкости, связанный с исполнительным механизмом жидкости, датчик расхода жидкости, узел протяжки гвбкой подложки, связанный с механизмом регул1фования скорости протяжки, датчик контроля нанесения жидкости на подложку, блок задания объема тракта жидкости, блок запаздывания, блок отклонения, блок задания ширины слоя, блок задания высоты слоя, логический блок, выходы которого подсоединены к исполнительному механизму подачн жидкости и механизму регулирования скорости протяжки, а входы подсоединены к входам датчика нанесения жидкости на подложку, к блоку отклсжений и датчику скоростк протяжки, соединенным между собой, блок задания ширины слоя и блок задания высоты слоя соединены с блоком отклонений, к которому подключен датчик расхода жидкости через блок запаздывания, соединенный с блоком задания объема тракта жидкости З}. Недостатком этого устройства является низкая точность, обусловленная тем, что управление процессом нанесения жидкости на гибкую подложку осуществляется посредством не связанных между собой кон- тзфов стабилизации основных управляемых параметров с одновременным автоматическим контролем содержания контролируемо компоненты жидкости. В случае, если содержание контролируемой компоненты отличается от требуемого значения, оператор вручную изменяет величину задания величины основного управляемого параме ра. Такое устройство не позволяет получить даже в пределах одной партии полива емой фотоэмульсии одинаковое в пределах одной партии содержание серебра в единице площади наноса фотоэмульсии на основу, т.е. не позволяет получить заданные однородные фотосвойства кинофотоматери- алов. Цель изобретения - повышение точности устройства. Поставленная цель достигаете тем, что в устройство, содержащее последовательно соеаиненные датчик расхода жидкости, первый и второй функциональные преобразователи, первый интегратор, третий функциональный преобразователь, формирователь и сумматор, выходы которого подключены к входам регуляторов расхода жидкости и скорости движения подложки, соответственно, последовательно соединенные задатчик объема жидкости и пер вый блок определения времени транспфтного запаздьшания, выходом подключенный к второму входу первого функционального преобразователя, а вторым входом - к , Датчику расхода жидкости, последовательно соединенные датчик скорости движения подложки, четвертый функциональный прео образователь и второй интегратор, въ1ходом подключенный к второму входу третьего функционального преобразователя, задатчик времени интеграторов, последов тельно соединенные задатчик дл|гаы подло жки и BTqac блок определения времени транспортного запаздывания, входом подключенный к датчику скорости движения подложки, а выходом - к вторым входам второго и четвертого функциональных преобразователей, датчик содержания конголируемой компоненты жидкости, задатчик нечувствительности, подключенный к второму входу формирователя, задатчик управляемого параметра, подключенный к второму входу сумматсра, и задатчик ширины слоя жидкости, соединенный с третьим входом третьего функционального преобразователя, введены последовательно со единенные задатчик содержания контролируемой компоненты жидкости и блок сравнения, а также последовательно соединенные блок определения высоты слоя жидкости, пятый функциональный преобразователь, третий интегратор, блок определения эквивалентного отклонения высоты слоя жидкости, выходом подключенный к четвертому входу третьего функционального преобразователя, а вторым и третьим входом соответственно к выходу блока сравнения и к выходу Датчика содержания контролируемой компоненты жидкости, соединенному со вторым входом блока сравнения, причем второй вход третьего интегратфа подключен к задатчику времени интегрирования, второй вход пятого функционального преобразователя соединен с выходом второго блока определения времени транспфтного запаздывания, а датчик скорости движения подложки соединен с первым входом блока определения высоты слоя жидкости, второй вход которого подключен к выходу первого функционального преобразователя, а третий вход - к задатчику ширины слоя жидкости. На чертеже представлена блок-схема предлагаемого устройства. Устройство содержит термостат 1 для хранения жидкости, экструзионное поливное, устройство ( ЭЦУ) 2, поливной валик 3, электродвигатель 4, гибкую подложку 5, регулятор 6 расхода жидкости, регулятс 7 скорости движения подложки, датчик 8 содержания контролируемой компшенЬ1 жидкости, датчик 9 расхода жидкости, датчик Д.О скорости движения подложки, задатчик 11 объема жидкости от точки измерения ее расхода до точки нанесения на подложки, первый блок 12 определения времени транспортного запаздывания, определяющий время движения жидкости от точки измерения ее расхода до точки нанесения на подложку, первый функциональный преобразователь 13, задатчик 1Л. содержания ксягррпируемой компоненты жидкости, блок 15 сравнения, блок 16 определения высоты слоя жидкости, второй функциональный преобразователь 17, первый интегратор 18, третий функциональный преобразователь 19, второй интегратор 20, четвертый функциональный преоб разователь 21, пятый функциоиальньй ip образователь 22, третий интеграто(з 23, задатчик 24 длины подложки, второй бло 25 определения времени транспортного запаздьшания, задатчик 26 времени ингегр рования, блок 27 определения эквивалент ного отклонения высоты слоя жидкости, задатчик 28 ширины слоя жидкости, формирователь 29, задатчик ЗО нечувствительности 30, сумматор 31, задатчик 32 управляемого параметра, клапан 33, регу лирующий подачу жидкости. Устройство работает следующим образом. Определяется мгновенное значение высоты наноса жидкости на гибкую подложк в точке полива. Из-за конструктивных особенностей ЭПУ 2 датчики 9 и 1О устанавливаются в разных точках. Первый до ЭПУ, а второй в точке полива. С выхода датчика 9 сигнал 3 (f), nponqjuHoнальный величине расхода, подается на один из входов первого функционального преобразователя 13, реализующего функцию переменного запаздывания 3 (t -t ). учитывающую время движения измеренного мгновенного значения расхода жидкости 0(t) от точки его измерения До точки нанесения на гибкую подложку 5. Для это го задатчик 11 вырабатьшает сигнал V , пропорциональный объему тракта подачи жидкости на полив ог точки измерения его расхода до точки нанесения на гибкую подложку. Этот сигнал поступает на один из входов блока 12. Одновременно на второй вход блока 12 подается сигнал пропорциональный величине 3 (t). На основе этих двух входных сигналов V и 3 (t) блок 12 определяется время t транспортного запаздывания жидкости от ДО точки наточки измерения ее расхода несения ее на гибкую подложку, как отношение(-ь}(1) с выхода блока 12 сигнал, пропорциональ ный величине Ъ, поступает на второй вхо функционального преобразователя 13, на выход которого снимается сигнал, пропорциональный величине 3 (fc-t) . Этот сигнал появится на выходе блока 13, тогда, когда измеренный элементарный объем жидкости d(t) достигает точки полива. При этом изменение мгновенных значений величины 3 (t-) учитывается переменным врюменем трансп ртного запаздьшания 1Г посредством блока 12. Датчиком 10 измеряется мгновенное значение скорости протяжки гибкой подложки 5 в точке нанесения lj(t). Приведенные в одну точку нанесения жидкости на подложку сигналы, пропорциональные мгновенному расходу жидкости и скорости протяжки подложки поступают на оба входа блока 16, который по известному соотношению f,/t). в и (г) где h (t) - мгновенное значение высоты нанесения жидкости на подложку в точке полива; В - ширина наносимого слоя, которую практически можно считать постоянной, определяет величину h (t) Для этого на третий вход блока 16 с выхода задатчика 28 подается сигнал, пропорциональный величине ширины наносимого слоя В. Так как величина содержания контролируемой компоненты жидкости в единице площади ее наноса на подложку является среднеинтёгральной характеристикой наносимого на подложку слоя жидкосто, измеряемой с постоянной времени измерения T(N, и используется, в вычислительных операциях по управлению рассматриваемым процессом совместна с величинами расхода жидкости на попив, скорости протяжки подложки и высоты наносимого слоя жидкости, то и эти величины также необходимо определять как среднеинтегральные с временем интегрирования - 1 , пртведенные в точку измерения контролируемой компоненты жидкости. Приведение ч этих величин в точку измерения контролируемой компоненты жидкости осуществляется следующим образом. Сигнал, пропорцио нальный мгновенному значению высоты наноса жидкости на подложку в точке нане- . сенияЬ(Ь), с выхода блока- 16 поступает на один из входов функционального преобразователя 22, который реализует функцию аеремс:шого запаздывания h (-Ь -ty), учитывающую ,время движения нанесенного слоя жидкости от точки нанесения до точи измерения содержания контролируемой омпоненты жидкости. Для этого задатчик 4 вьфабатывает сигнал, пропорциональый расстоянию & от точки измерения соержания контролируемой компоненты жидости до точки нанесения. Этот сигнал по/ ступает на .один из входов блока 25. Одновременно на вгфой вход блока 25 пода ется сигнал, гфопсрциональный fU(t). На основе этих двух сигналов блок 25 опред ляет время транспортного эапаадьшания tij как отношение )(3) с выхода блока 25 сигнал, пропорциональный I поступает на второй вход функционального преобразователя 22, на выходе котфого снимается сигнал, пропорциональный величине h (t/--Х о). Этот сигнал появляется на выходе блока 22 тогда, когда определенное расчетным путем в точке нанесения значения высоты наноса жидкости достигает точки измерения содержания контролируемой компоненты жидкости.. При этом изменение мгнове ных значений высоты учитывается переме ным временем запаздывания посредством блока 25. Аналогично осуществляется реа лизация функций переменного запаздывани d (Ь-ц- 1/,) и и (t-Trj), выполняемые соот ветственно функциональными преобразова1 телями 17 и 21. С выхода функционально го преобразователя 22 сигнал, пропорцио нальный h (t -t/j) поступает на один из выходов интегратора 23, на другой вход которого с выхода задатчика 26. поступает сигнал, пропорциональный времени интегрирования Т. Интегратор 23 определяет в точке измерения содержания кон тро/ифуемой компоненты жидкости средне интегральное значение высоты нанесенног слоя жидкости HQ . t b-Tt Аналогично интегратфы 18 и 20 определяю- в точке измерения содержания контролируемой компоненты жидкости среднеинтегральные значения расхода жид кости на полив Сс, и скорости протяжки гибкой подложки Up. 3,(t-VVcit(5) u, ud-tjdt При определении эквивалентного отклонения высоты нанесенного слоя жид кости на подложку и h исходим из того, что абсолютная высота наносимых на подложку слоев жидкости обычно не превосходит 100-150 мк, что, в свою очередь позволяет пренебречь градиентом ко1щентрааин содержания контролируемой компоненты по высоте слоя жидкости. Принятые допущения позволяют считать, что для элементарной площадки и6 между мгновенным значением вьюоты износа жидкости h (t) и содержанием контролируемой компоненты жидкости С- (t) существует линейная зависимость, &(t) .) h(.t) uh(tj А -с (t) - приращение содержания контролируемой компсненты жидкости на площадке Лр. ДК (t) - приращение (эквивалентное отклонение) высоты наноса жидкости, обусловившее приращение содержания контролируемой компоненты Л с (t) .Обычное содержание контролируемой компоненты относят к 1 м поверхности слоя жидкости на подложке, учитьшая то, что время наноса жидкости на 1 м подложки соответственно, при ширине и скорости полива 12ОО мм и 2О м/мин очень мало и составляет порядка 2,5 сек, можно принять.,градиент концентрации контролируемой компоненты по длине Полива равной нулю. С учетом принятого допущения вьфаженкя (7) можно записать где С - средне.интегральное значение содержания ксдатролируемсй компоненты жидкости, ЛО- отклонение среднеинтегрального значения содержания контролируемой компоненты от ег.о заданного значения, лЬо -среднеинтегральное значение эквивалентного отклонения высоты наноса жидкости. Из вьфажения (&) следует, что , и (9) На основании вьфажения (9) блок 2,7 определяет эквивалентное отклонение высоты наноса жидкости на подложку, для чего на его входы поступают соответственно с выходов блоков 23, 8, 15 сигналы, пропорциональные среднеинтегральным значениям высоты наноса жидкости h , содержания контролируемой компоненты жидкости С и ее отклонению Д С от заданного значения. Выработанный блоком 27 сигнал пропорциональный эквивалентному отклсиению высоты наноса жидкости на U Ь необходимо преобразовать в сигнал, пропорцншальный эквивалентному отклонению управляемого параметра 3 или &UL, имеющего меньшую постоянную времени по основному каналу управления. Из выражения (1) следует, что в качестве основных управляемых параметров при рассматрива мом экструэионнрм способе полива могут быть приняты расход жидкости на полив 3 и скорость протяжки гибкой подложки и , а основными каналами управления яв ляется: высота наноса жидкости h - расход жидкости на полив J и высота наноса жидкости h - скорость протяжки под-. ложки и . Проведенное исследование динамики су ществующих автоматических стабилизирующих систем расхода жидкости на попив и скорости протяжки показало следующее. Ввиду своих конструктивных особенностей эти системы, как правило, имеют различное время переходного процесса и, сле довательно, различные постоянные времени (Т) по основным каналам управления ЭПУ т.е. На одном экструзионном поливном уст ройстве могут быть скомпонованы автоматические стабилизирующие системы с различным соотношением постоянных времени по основным каналам управления Th 3 и Th - и , т.е. возможны случаи, когда и или 3 Th U7ThИз этого следует, что для повышения равномерности содержания контролируемо компоненты жидкости в качестве основного управляемого следует выбирать параметр, имеющий меньщую постоянную времени по основному каналу управления, а в данном случае необходимо в качестве возможных основных управляемых параметров рассматривать как 3 , так и U . Рассмотрим случай, когда в качестве основного управляемого параметра принято с . На основании выражения (2) можно записать. .. )±AU откуда-jj j -u(t) (ii) ди. (t) Вьфажая (lO) и (11) посредством функционального преобразователя 19, соответственно получаются сигналы, пропор циональные эквивалентным отклонениям ос новного управляемргоПараметра (йЗ 8 3310 или Д УС ), оусловленные соответствующими эквивалентными отклонениями высоты наноса жидкости на гибкую подложку. Для этого на входы функционального . преобразователя 19 с выходов блоков 27, 18,20 и 28 соответственно подают сигналы, пропорциональные эквивалентному отклонению высоты наноса жидкости на подложку hr . среднеинтегральнУм значениям расхода жидкости 3 и скорости протяжки подложки UQ В точке определения содержания контролируемся компо- ненты жидкости, а также щирине наносимого СЛОЯ В. С выхода функционального преобразователя 19 сигнал, пропорциональньй отклонению основного управляемого параметра подается на один из входов формирователя 24, который выполняет функции ПИДрегулятора. Изменением параметров формирователя 29 можно получать П-, И-, ПИ- или ПИД- законы управления. Задатчик 30 определяет величину эквивалентного отклонения основного управляемого параметра, на основе которой окончательно формируется корректирующий импульс величины задания одной из автоматическ1сс систем стабилизации. С выхода формирователя 29 окончательно сформированный в соответствии с принятым законом управления корректирующий сигнал для одной из автоматических систем стабилизации подается на один из входов сумматора 31, на второй вход которого с задатчика 32 подается сигнал, пропорциональный величине задания этой же автоматической системе стабилизации. С выхода сумматора 31 сигнал, пропорциональный окончательной величине изменения основного управляемого параметра, имеющего меньщую. постоянную времени по основному каналу управления, подается на вход регулятора 6 или на вход ре1улятора 7. После чего соответствующая автомагическая система стабилизации посредством регул1фующе-го клапана 33 изменяет подачу жидкости для нанесения ее на подложку или посредством .электродвигателя 4 изменяет скорость вращения поливного валика 3. Исиользование предлагаемого устройству а для автоматического управления процесом нанесения жидкости на гибкую подожку позволяет повысить точность автоатического управления нанесением жидкоси на подложку, что, в конечном счете, лучшает качество наносимого на гибкую одложку слоя жидкости, а для кинофото- атериалов - их качество. 1184 Формула нзобрегення Усгройсгво для управления процессоти нанесения жядкосги на подложку, содержащее последовательно соединенные да гчик расхода жвдкосш, первый и BTqpc функциональные преобраэовагели, первый ингеграгор, грегнй функциональный гфеобразовагель, формировагель и суммагор; выходы которого подключены к входам регуляторов расхода жидкости и скорости движения подложки соответственно/ последовательно соединенные задатчик обье-; ма жидкости и первый блеж щзаделения времени транспортного запаздьюания, выходом подключенный к второму входу первого функционального преобразователя, а вторым входом - к датчику расхода жидкости, последовательно соединенные датч чик скорости движения подложки, четвертый функциональный преобразователь и HHTeipaTop, выходом подключенный к второму входу третьего функционального преобразователя, задатчик времени интегрирования, подключенный к вторым вхо дам первсяго и второго интегратора, последовательно соединенные задатчик длнны подложки и второй блок определения времени транспортного запаздывания, входом подключенный к датчику скорости движения подложки, а выходом - к втфым вхо дам вт чэого и четвертого функциональных преобразователей, датчик содержания конт ролируемой компоненты жидкости, задатчик нечувствительности, подключенный к второму входу фсрмирователя, задатчик управляемого параметра, подключенньй к второму входу .сумматора, и зааатчик ширины слоя жидкости, соеднне шый с тре тьим входом третьего функцисяальнсго 3 преобразователя, отличающееся тем, что, с целью повышения точности устройства, сжо содержит последовательно соединенные задатчгик содержания контролируемой компоненты жидкости и блок сравнения, а также последовательно соединенные блсж определения высоты слоя жидкости, пятый функциональный преобразователь, третий интегратор, блок определения эквивалентного отклонения высоть слоя жидкости, выходом подключенный к четвертому входу функционального преобраз(жателя, а втсчзым и третьим входом соответственно к выходу блока сравнения и к выходу датчика содержания контропируемой компс«енты жидкости, соединенному со вторым входом блока сравнения, причем второй вход третьего интегратора подключен к задатчику времени интегрирования, второй вход пятого функционального преобразователя соединен с выходом второго блока определения времени транспортного запаздывания, а датчик скорости Движения подложки соединен с первым входом блока определения высоты слоя жидкости, второй вход которого подключен к вькоду первого функционального преобразователя, а третий вход - к задатчику ширины слоя жидкости. Источники информации, принятые во щимание при экспергизе 1.Щеберетов В. И. и др. Основы технологии светочувствительных фотоматериалов, М., Химия, 1977, с. 336-339. 2.Патент Великобритании № 1216233, кл, (3 050 5/03, 1968. 3.Авторское свидетельство СССР по заявке № 2560333, 18-24, кл. Q 05D 5/ОЗ„26.12.77 (прототип).
Ll
:JL.
I T/j ) I
дО


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления нанесением жидкости на подложку | 1977 |
|
SU734627A1 |
| Экструзионное устройство для нанесения жидкостных покрытий на гибкие подложки | 1987 |
|
SU1458855A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Устройство для управления процессом нанесения жидкости на подложку | 1982 |
|
SU1081624A1 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Способ управления установкой межклетевого охлаждения полосы в процессе непрерывной горячей прокатки и устройство для его реализации | 1980 |
|
SU1011289A1 |
| Система управления для объектов с переменным запаздыванием | 1986 |
|
SU1383291A1 |
| Устройство для контроля пропусков полива влагосодержащих фоточувствительных эмульсий и растворов для вспомогательных слоев на движущуюся подложку | 1987 |
|
SU1739358A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Способ управления загрузкой агломерационной ленты шихтой | 1989 |
|
SU1624036A1 |