равления, представляющий установку для нанесения фоторезиста на стеклянную заготовку. Задатчшс 1 формирует сигнал для управления приводом, перемещающим контрольную линейку и заготовку. Запаздывание между формированием сигнала и контролем толщины слоя фоторезиста имитирует в системе посредством звена, имеющего память
291
ОЗУ 8, До достижения номинальной толщины слой, измеряемой датчиком, в ОЗУ 8 записьшается текущее значение скорости. При совпадении заданного и измеренного значений скорости система формирует сигнал, переводящий ОЗУ 8 в режим чтения и коммутирующий напряжение, задающее, скорость привода. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Устройство для управления процессомНАНЕСЕНия жидКОСТи HA пОдлОжКу | 1979 |
|
SU840033A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| Устройство для определения параметров передаточных функций линейных динамических объектов | 1984 |
|
SU1215093A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Устройство для задания толщины гальванических покрытий | 1985 |
|
SU1298266A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Гидродинамический стенд для испытаний протезов клапанов сердца | 1985 |
|
SU1299586A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |

Изобретение относится к автоматическому управлению и регулированию И может быть использовано для организации систем управления технолоcfpac гическими объектами с переменным запаздыванием. Цель изобретения - расширение области применения системы при одновременном упрощении ее конструкции. В системе реализуется принцип синхронного запаздьшания. Система содержит задатчик 1 параметра, аналого-цифровой преобразователь 3 (АЦП)5 оперативное запоминающее устройство 8 (ОЗУ), преобразователь 39 код - напряжение, аналоговые ключи 2, 5, компаратор 22, преобразователь напряжение - частота 15., два управляющих триггера 10, 25, задатчики 16, 24, четыре одновибратора 11, 19, 20. 23, счетчик 14 адреса, элементы И 12, ИЛИ 13, ШШ-НЕ 9, датчик 18 параметра, инверторы 4, 21 и объект 17 упi СЛ СА 00 00 Ю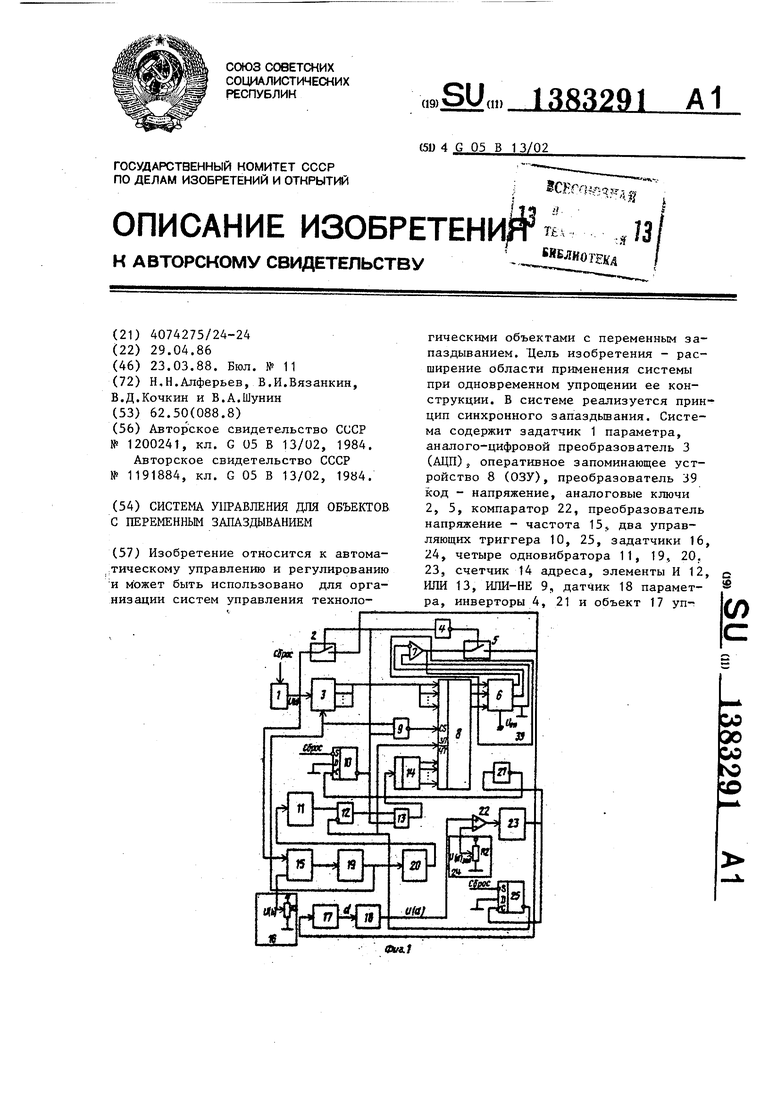
1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для организации систем управления технологи- ческими объектами с переменным запаздыванием.
Цель изобретения - расширение области применения системы при одновременном упрощении ее конструкции
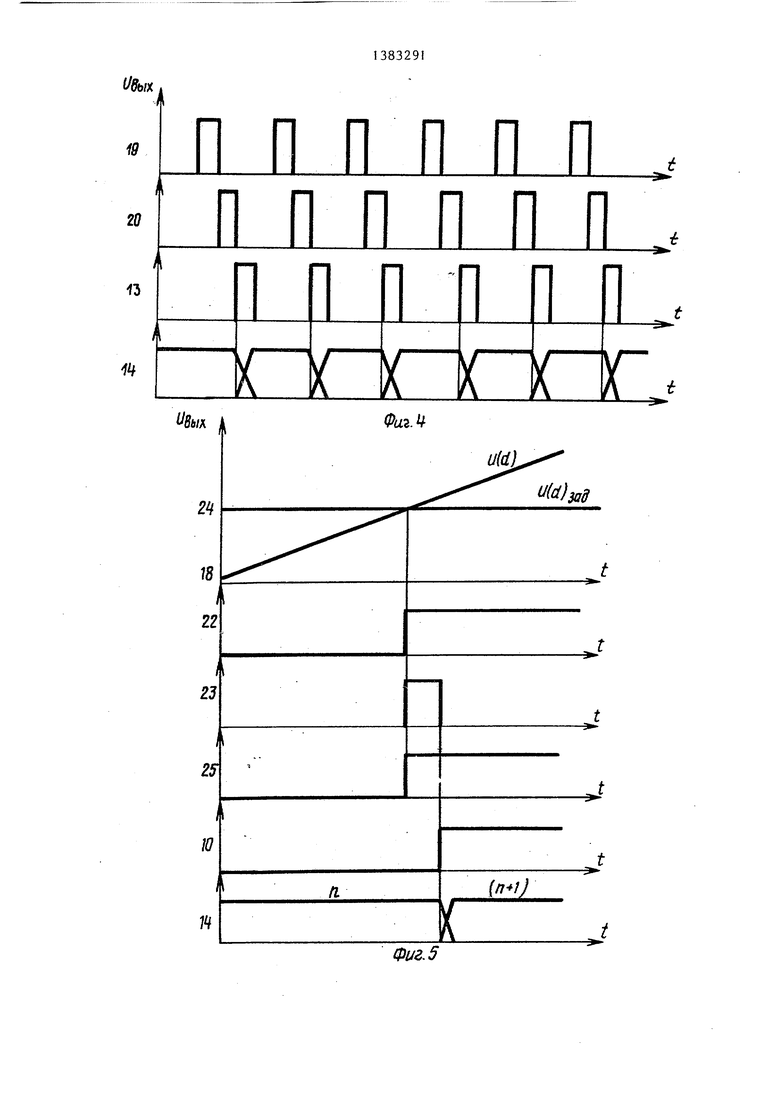
На фиг. 1 показана функциональная схема системы управления для объектов с переменным запаздьшанием на фиг. 2 - структурная схема объекта управленияj на фиг. 3 - графики за- висимости толщины наносимого фоторе зиста от времени на фиг. 4 - временные диаграммы работы системы в режиме записи в ОЗУ} на фиг. 5 - временные диаграммы работы системы в режиме перехода от записи в п-ю ячейку к чтению содержимого (п+1)-й ячейки ОЗУ.
Система управления для объектов с переменным запаздьшанием содержит задатчик 1 параметра, первый аналоговый ключ 2, аналого-цифровой преобразователь 3 (АЦП), первьй инвертор 4, второй аналоговьй ключ 5, циф роаналоговый преобразователь 6 (ЦАП) с преобразователем 7 ток - напряжение, оперативное запоминающее устройство 8 (ОЗУ), элемент ИЛИ-НЕ 9, управляющий триггер 10. третий одно- вибратор 11, элемент И 12, элемент ИЛИ 13, счетчик 14 адреса, преобразователь 15 напряжение - частота, первьй задатчик 16, объект 17 управления, датчик 18 параметра, первый одновибратор 19, второй одновибратор 20, второй инвертор 21, компаратор
22, четвертый одновибратор 23, второй задатчик 24, второй управляющий триггер 25. стабилизированный электропривод 26 постоянного тока, электродвигатель 27 постоянного тока, передачу 28 винт-гайка, рычаг 29, кронштейн 30, держатель 31 контрольной линейки, контрольную линейку 32, держатель 33 заготовки, заготовку 34, бак 35, н аполненный фоторезистом 36, редуктор 37. измерительную систему 38 (датчика 18 параметра), преобразователь 39 код - напряжение.
Задатчик 1 генерирует на выходе функциональную зависимость линейного нарастания параметра (напряжения задающего скорость) во времени с возможностью регулирования скорости нарастания и установки произвольного начального уровня. Электродвигатель 27 объекта 17 управления через ре- д уктор 37 с передаточным отношением
Сиг
м,
и передачу 28 винт - гайка соединен с рычагом 29, на котором жестко закреплен кронштейн 30. На кронштейне закреплены держатель 31 с контрольной линейкой 32 и держатель 33 с заготовкой 34. Держатели 31 и 33 размещены в баке 35 с фоторезистом 36. В зоне контроля размещена измерительная система 38 датчика 18.
Система управления предназначена для определения оптимальной скорости движения заготовки при нанесении фоторезиста на заготовку методом окунания в установку для нанесения фоторезиста. Технологический процесс нанесения фоторезиста при условии контроля выходного параметра (толщины наносимого слоя фоторезиста) в силу его специфики невозможно осуществить таким образом, чтобы формирование существенного параметра и его контроль осуществлялись одновременно. Особенно большие трудности в управлении объектом возникают при условии влияния входного (управляющего) параметра на величину запаздывания сГ . Однако в некоторых случаях непрерывный контроль параметра не является обязательным вследствие малой скорости изменения возмущающих воздействий. В этих случаях на определенный цикл работы (например, нане iсение слоя фоторезиста на одну заготовку или небольшую партию заготовок достаточно однократного определения значения оптимального управляющего параметра. При нанесении слоя фоторезиста на заготовку методом окунания толщина формируемого слоя зависит от скорости -у движения заготовки. Возмущающими воздействиями являются температура и вязкость раствора фоторезиста, атмосферное давление Однако так как цикл нанесения длится несколько минут в данном случае нет необходимости в непрерывном контроле толщины пленки наносимого фоторезиста. Зависимость толщины d наносимой пленки от скорости v движения заготовки определяется выражением
где К - коэффициент, определяемый
свойствами фоторезиста и материала заготовки.
Система управления перед привод 26 сигнал о скорости но с подходом соответствующ ка пленки фоторезиста, нане на данной скорости. Таким о несмсЯгря на наличие запаздь каждый момент времени имеет о толщине слоя, в зоне конт информации в ОЗУ 8 о величи рости движения заготовки, н этот слой наносился. Пусть изменения толщины d фоторез времени, определяемой скоро мируемой задатчиком изображ d(t) (фиг. 3), тогда измене щины слоя в зоне контроля б ражаться кривой d(t - С ) т рой будут иметь запаздывани тельно соответствующих точе мости d(t) на величину, раз для разных d и убывающую с толщины, так как большей то технологии нанесения соотве большая скорость нанесения. d - толщина, соответствующ ной скорости задатчика 1, а щина, соответствующая его н ной скорости, то пересечени мостей d4 и d(t -г) в мом мени t, соответствует на за d(t), определяемой задатчик
jlrt ЛЛ .-1Х/Г1| ,J 4. tA X .ДХ
Скорость движения заготовки (соот-; щине слоя (d „ + id), т.е. в
ветственно и скорость привода) изменяется по закону, определяемому задатчиком 1. При этом датчик 18 параметра (толщина слоя фоторезиста) выдает сигнал, который сравнивается с опорным. При совпадейии сигналов привод переключается на задание той скорости, на которой был нанесен данный участок. Для определения этой
45
-50
обнаружения в зоне контроля нальной толщины в установке ния формируется более толсть отличньй от номинального н ну ud. Поэтому для формиров номинальной толщины d н в мом мени t, привод 26 необходимо чить на задание той скорости торой бьша нанесена номиналь щина. Определение этой скоро ществляется в системе управл причем задержка сигнала цифр тодом моделируется по тому ж ну, каким определяется и зап ние на объекте. Имитация пер запаздьшания о реализуется п вом звена, имеющего память, ности ОЗУ 8. Информация зада
скорости реализуется принцип синхрон ного запаздывания. Система управления имитирует запаздьшание, зависящее от скорости движения заготовки, т.к.
.
где h - конструктивный параметр, определяемый расстоянием от зоны
(фиг. 2) формирования слоя до зоны о контроля толщины слоя, т.е. запаздывание t обусловлено перемещением участков контрольной линейки 32 от зоны нанесения к зоне контроля на некоторое конструктивно-заданное расстояние Кис конкретной скоростью V.
Система управления передает на привод 26 сигнал о скорости синхронно с подходом соответствующего участка пленки фоторезиста, нанесенной на данной скорости. Таким образом, несмсЯгря на наличие запаздьшания, в каждый момент времени имеется сигнал о толщине слоя, в зоне контроля и информации в ОЗУ 8 о величине скорости движения заготовки, на которой этот слой наносился. Пусть график изменения толщины d фоторезиста во времени, определяемой скоростью,формируемой задатчиком изображен линией d(t) (фиг. 3), тогда изменение толщины слоя в зоне контроля будет изображаться кривой d(t - С ) точки которой будут иметь запаздывание относительно соответствующих точек зависимости d(t) на величину, различную для разных d и убывающую с ростом толщины, так как большей толщине по технологии нанесения соответствует большая скорость нанесения. Если d - толщина, соответствующая начальной скорости задатчика 1, а d - тол- щина, соответствующая его номинальной скорости, то пересечение зависимостей d4 и d(t -г) в момент времени t, соответствует на зависимости d(t), определяемой задатчиком, ЛЛ .-1Х/Г1| ,J 4. tA X .ДХ
щине слоя (d „ + id), т.е. в
момент
45
50
55
обнаружения в зоне контроля номинальной толщины в установке нанесения формируется более толстьй слой, отличньй от номинального на величину ud. Поэтому для формирования слоя номинальной толщины d н в момент времени t, привод 26 необходимо переключить на задание той скорости, на которой бьша нанесена номинальная толщина. Определение этой скорости осуществляется в системе управления, причем задержка сигнала цифровым методом моделируется по тому же закону, каким определяется и запаздывание на объекте. Имитация переменного запаздьшания о реализуется посредством звена, имеющего память, в част- ности ОЗУ 8. Информация задатчика 1,
51383
предварительно преобразованная в цифровой код, записывается в ОЗУ 8. Переход от одной ячейки ОЗУ к следующей происходит с частотой f (периодом- Т), зависящей от входного сигна
ла, пропорционального задаваемой скорости привода
Адреса ячеек формируются счетчиком 14 адреса. Период поступления импульсов на его счетный вход связан с величиной входного сигнала, пропорционального скорости, соотношением
т - , U(h) RG
где U(v) - напряжение задатчика 1,
формирующее величину v
U(h) - напряжение на задатчике
16, формирующее величину
Ь; R,C - элементы, определяющие
постоянную времени интегратора, на базе которого реализован преобразователь 15 напряжение - частота. Текущая информация о величине скорости в виде кода с выхода АЦП 3 обновляется с частотой преобразования АЦП 3. Схема перебора ячеек ОЗУ работает в автономном цикле и непрерьш- но. инкрементирует адрес ОЗУ с частотой, пропорциональной скорости, формируемой задатчиком 1, Входные данные постоянно находятся на входах данных ОЗУ 8 и смена их во время записи запрещена. В режиме записи сигнал ЗП/4Т постоянно установлен на Запись. Импульсом одновибратора 19 через элемент ИЛИ-НЕ 9 по входу CS Выбор кристалла записывается текущая информация, после чего с задержкой, определяемой одновибратором 20, импульсом одновибратора 11 через элементы ИЛИ 12 и И 13 меняется адре в счетчике (увеличивается на единицу инкрементируется) , следующий цикл записи происходит аналогично, но уже по вновь установившемуся адресу. Модель преобразования скорости в частоту реализована в системе управления и дискретном виде. Если в память бесконечной величины при исполь зовании ОЗУ с циклической адресацией ячеек
0
5
0
5
35 50 55
40
записывать коды текущих значений скорости, увеличивая через каждый шаг номер ячейки памяти на 1, а считывать информацию одновременно из ячеек, номера которых меньше на число п, то считываемая информация будет запаздывать относительно записанной на время
,
/ де п - число номеров, на которое
ячейка, принимающая информацию, предшествует ячейке, выдающей информацию.
Таким образом, время запаздывания сигнала обратно пропорционально частоте счетчика адреса, которая моделирует скорость движения заготовки V, т.е. сигнал, пропорциональный скорости, преобразуется в частоту импульсов, которые управляют счетчиком 14 адреса.
Сигнал с задатчика 1 через анало- говьй ключ 2 поступает на злектопри- вод 26, обеспечивающий стабильную скорость вращения электродвигателя 27. Скорость вращения электродвигателя со, посредством редуктора 37 (сд) и передачи 28. винт - гайка передается на рычаг 29, которьй обеспечивает линейное перемещение кроншт ейна 30. При движении кронштейна вверх одновременно с ним перемещается держатель 31 контрольной линейки 32, а после установления скорости, соответствующей номинальной толщине d фоторезиста, перемещается вверх и держатель 33 со стеклянной заготовкой 34. Задержку перемещения держателя 33 обеспечивает паз, выполненный в месте взаимодействия держателя 33 с кронштейном 30. В процессе перемещения заготовки 34 вверх на нее наносится слой фоторезиста 36 из бака 35.
До тех пор, пока сигнал с датчика 18 не достиг номинального значения, схема работает в режиме записи в ОЗУ 8 текущих значений скорости, так как код текущей скорости постоянно находится на выходном регистре АЦП 3. Преобразователь 15 напряжение - частота формирует импульсы, запускающие первьй одновибратор 19. (фиг..4). По сигналам одновибратора 19 через элемент ИЛИ-НЕ 9 сигналом CS (выбор кристалла) в ОЗУ записывается теку- щее значение кода скорости. Для исключения искажения информации на время записи в ОЗУ сигналом с одновиб- ратора 19 на АЦП 3 запрещается запись информации в выходные регистры АЦП, По спаду импульса первого одно- вибратора 19 запускается второй од- новибратор 20, по спаду импульса которого запускается третий одновибра- тор 11. Импульсы с третьего одновиб- ратора 11 через элементы 12 и 13 поступают на счетньм вход адресного счетчика 14. Второй задатчик 24 формирует U(d),д .
В момент достижения U(d) UCd).,. (фиг. 5) компаратор 22 опрокидывается и запускается четвертый одновиб- ратор 23, фронтом импульса которого перебрасывается управляющий триггер 25. Сигнал этого триггера переводит ОЗУ по входу ЗП/4Т в режим чтения, блокируя при этом при помощи элемента И 12 приход импульсов с третьего одновибратора 11 на адресньм счетчик 14. По спаду импульса с четвертого одновибратЬра 23 перебрасывается управляющий триггер 10, выходным сигналом которого счетчик 14 адреса переводится на вьщачу адреса следующей ячейки, а через элемент ИЛИ-НЕ 9 формируется сигнал CS для ОЗУ 8. Одновременно посредством инвертора 4 коммутируется задающее напряжение U(v).
По адресу (п+1)-й ячейки ОЗУ 8 выдает содержимое ячейки с номером (п+1), т.е. ячейки, запись в которую была произведена ранее за п шагов адресного счетчика 14. С выходов ОЗУ 8 код скорости поступает на входы преобразователя код - напряжение 39. состоящего из ЦАП (6), имеющего токовый выход, и операционного усилителя 7 для преобразования тока в напряжение. Восстановленный сигнал задатчика 1 через аналоговый ключ 5 подается на привод 27 объекта 17 управления, задавая необходимую скорость.
Реализация принципа синхронного запаздьшания позволяет решить задачу определения номинального управляющего воздействия для объектов с переменным запаздыванием небольшими ап- па ратурными затратами.
Формула изобрет
е н и я 55
Система управления для объектов с переменным запаздыванием, содержа0
5
0
5
0
5
0
5
0
5
.щая объект управления, подключенньй выходом к входу датчика параметра, задатчик параметра, отличающаяся тем, что, с целью расширения области применения системы при одновременном упрощении ее конструкции, в нее введены оперативное запоминающее устройство, аналого-цифровой преобразователь, счетчик адреса, первьй и второй аналоговые ключи, преобразователь код - напряжение, первьй и второй инверторы, элемент ИЛИ-НЕ, элемент ИЛИ, элемент И, первьй и - второй управляющие триггеры, преобразователь напряжение - частоты, первьй и второй задатчики, компаратор, первьй, второй, третий и чет- вертьй одновибраторы, причем выход задатчика параметра соединен с информационным входом первого аналогового ключа, с входом аналого-цифрового преобразователя и с информационным входом преобразователя напряжение - частота, подключенного опорным входом к выходу первого задатчика, а йыхо- дом - к входу первого одновибратора, выход которого соединен с входом запрета аналого-цифрового преобразователя, с первым входом элемента ИЛИ-НЕ и с входом второго одновибратора, выход которого подключен через третий одновибратор к первому входу элемента И, подключенного выходом к первому входу элемента ИЛИ, выход которого соединен со счетным входом счетчика адреса, разрядные выходы которого подключены соответственно к адресньгм разрядным входам оперативного запоминающего устройства, разрядные выходы которого соединены соответственно с разрядными входами преобразователя код - напряжение, подключенного выходом к информационному входу второго аналогового ключа, выход которого соединен с входом объекта управления и с выходом первого аналогового ключа, управляющий вход которого соединен через первьм инвертор с управляющим входом второго аналогового ключа и непосредственно - с. вторым входом элемента ИЛИ, с выходом первого управляющего триггера и с вторым входом элемента ИЛИ-НЕ, подключенного выходом к входу выбора кристалла оперативного запоминающего устройства,; информационные разрядные входы которого соединены соответственно с раз-.
91383291
рядными выходами аналого-цифрового преобразователя, а вход записи-чтения соединен с вторым входом элемента И и с выходом второго управляющего триггера, тактовьй вход которого подключен через второй инвертор к тактовому входу первого управлянщего
10
триггера, а непосредственно - к выходу четвер гого одновибратора, вход которого соединен с выходом компара тора, подключенного опорным входом к выходу второго задатчика, а информационным входом - к выходу датчика параметра.
/7
/
30
15
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
