(54) СЛЕД}ПЦАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU999014A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
I
Изобретение относится к автоматике и может быть использовано в радиотехнике и приборостроении.
Известна следящая система, содержащая измеритель угла рассогласоваиия,, усилитель, двигатель, тахогенератор постоянного тока Г3
Недостатком известной следящей системы является низкая надежность.
Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая элемен сравнения, первый вход которого соединен кинематически со входом системы, второй вход - через редуктор с выходом двигателя и со входом синхронного тахогенератора, а выход - со входом датчика полярности сигнала и с первым входом суммирующего усилителя, второй вход которого соединен с выходом умножителя, а выход - со входом двигателя, и выпрямитель, вход которого подключен к выходу синхронного тахогенератора Г21.
Недостатком следящей системы является малая точность.
Цель изобретения - повьшение точности системы.
Эта цель достигается тем, что в следящую систему введен элемент задержки, причем первый вход умножителя подключен через злемент задержки к выходу датчика полярности сигнала, а второй вход - к выходу вьшрямителя.
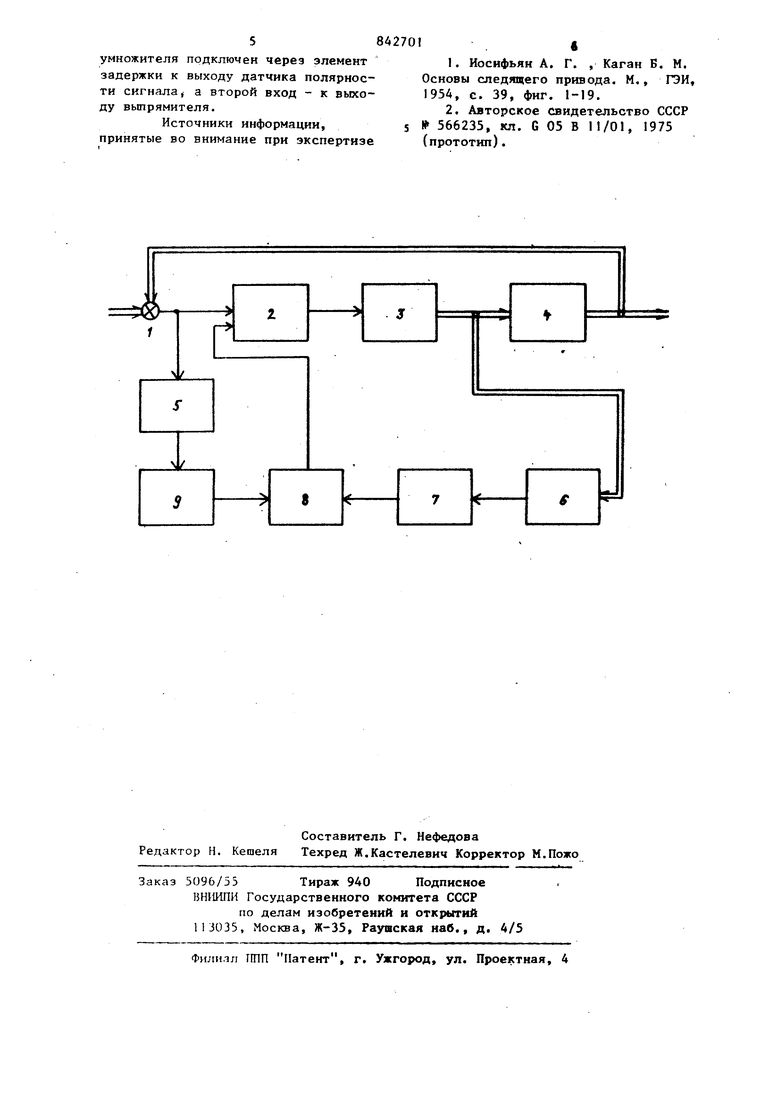
На чертеже приведена функциональная схема следящей системы.
Система содержит злемент I сравнения (измеритель угла рассогласования) , суммирушций усилитель 2, двигатель 3, редуктор 4, датчик 5 полярности сигнала, синхронный тахогенератор 6, выпрямитель 7, умножитель 8,элемент 9 задержки.
Следящая система работает следую-( :щим образом. Иэмеритеяь 1 угла р ссогласоьания выявляет разность между входны и выходным углами следящей системы, преобразует ее в напряжение, которо усиливается суммирукмцим усилителем 2,управляющим скоростью двигателя 3,который через редуктор 4 связан с измерителем 1 угла рассогласования. Скорость двигателя 3 измеряется синхронным тахогенератором 6, выходное напряжение которого выпрям ляется выпрямителем 7. Напряжение с выхода выпрямителя 7 поступает на вход умножителя 8, Датчик 5 поляриости сигнала ввдает напряжение, сдвигаемое по времени элементом задержки 9 на определенную вепичинуТ. Напряжение с выхода злемента 9 задержки поступает на другой вход умножителя 8. Умножитель 8 формируе напряжение, пропорциональное скорос ти вращения двигателя 3. Полярност напряжения с выхода умножителя 8 определяется полярностью сигнала ра согласования с выхода измерителя угла рассогласования. Сигнал с выхода умножителя 8 действует как отрицательная обратная связь по ско рости, обеспечивая устойчивость сле дящей системы. Рассмотрим работу следящей систе мы при скачкообразном входном воздействии. Под действием сигнала рассогласо вания с выхода измерителя 1 угла рассогласования, усиленного суммирующим усилителем 2, двигатель 3 разгоняется . При смене полярности сигнала рассогласования двигатель 3-начинает тормозиться, но по инерц делает выбег, и его скорость уменьшается до нуля только по прошествии некоторого времени. Пр зтом на вхо суммирующего усилителя 2 сигнал рассогласования уже имеет значитель ную величину другого знака, и двига тель 3 начинает вращаться в другую сторону, стремясь свести сигнал рассогласования к нулю, и в момент времени, когда он станет равен нулю, двигатель по инерции проходит нужное положение и т. д. Таким образом, переходный процес получается колебательным и время переходного процесса значительно. 14 Действие сигнала обратной связи аключается в следующем. В момент времени, когда сигнал рассогласования меняет свою полярность, датчик 5 полярности сигнала формирует напряжение, которое сдвигается элементом 9 задержки на время Z . Напряжение с выхода элемента 9 :задержки служит для коммутации полярности сигнала, снимаемого с выхода выпрямителя 7. В результате на выходе умножителя 8 получается сигнал, который суммируется в суммирукицем усилителе 2 с сигналом рассогласования. Действие сигнала обратной связи приводит к значительному улучшению переходного процесса следящей системы за счет того, что торможение двигателя 3 начинается в более ранний момент времени, и к положению согласования, когда сигнал рассогласования равен нулю, следящая.система подходит с меньшей скоростью. 8результате этого торможение двигателя 3 происходит за более короткое время м переходный процесс затухает значительно быстрее. Элемент 9задержкн обеспечивает эффективное торможение двигателя 3. Положительный эффект от использования изобретения состоит в том, что при сохранении положительных свойств известной следящей системы (простота и эффективность коррекции, предлагаемая следящая система обеспечивает повьшгение надежности. Формула изобретения Следящая система, содержащая элемент сравнения, первый вход которого соединен кинематически со входом системы, второй, вход - через редуктор с выходом двигателя и со входом синхронного тахогенератора, а выход - со входом датчика полярности сигнала и с первым входом суммирующего усилителя, второй вход которого соединен с выходом умножителя, а выход - со входом двигателя, и выпрямитель, вход которого подключен к выходу синхронного тахогенератора, отличающаяс я тем что, с целью повышения точности системы, она содержит элемент задержки, причем первый вход умножителя подключен через элемент задержки к выходу датчика полярности сигнала( а второй вход - к выходу вьтрямителя. Источники информации, принятые во внимание при экспертизе 84270 5 1( 1.Иосифьян А. Г. , Каган Б. М. Основы следяцего привода. М., ГЭИ, 1954, с. 39, фиг. 1-19. 2.Авторское свидетельство СССР 566235, кп. G 05 В 11/01, 1975 (прототип).
