1
Изобретение относится к сельскохозяйственной технике и предназначено для механизации сбора ягод, преимущественно облепихи.
Известны рабочие органы ягодоуборочных машин, включающие барабан с пальцами и механизм возбуждения механических колебаний 1.
Наиболее близким по технической сущности и достигаемому результату к изобретению является рабочий орган ягодоуборочной машины, содержащий дебалансный вибратор для возбуждения крутильных колебаний и жестко закрепленный на корпусе вибратор, строго по его оси вращения, вал с полухомутами, в теле которых в радиальных отверстиях по посадке с натягом установлены круглые пальцы 2.
Недостаток известных рабочих органов при сборе ягод облепихи - низкая долговечность исполнительных элементов, т. е. полухомутов с пальцами.
При колебаниях рабочего органа под действием знакопеременных нагрузок со стороны пальца происходит релаксация напряжений сжатия, вызванных пластическим деформированием поверхности отверстия в теле полухомута при посадке пальца с натягом.
Релаксация напряжений сжатия, удерживавших пальцы рабочего органа в теле полухомута, приводит к выпаданию пальцев, а значит и к поломке рабочего органа. Подобное явление происходит при работе известного рабочего органа уже на частотах 18-20 Гц и при амплитудах 30-50мм в течение 2-6 ч. Для осуществления сбора ягод облепихи
из-за специфических свойств этой культуры (малого веса ягод - 0,2-0,4 г и большего усилия отрыва 140-210 г), необходимо приложение вибрационного воздействия с частотой около 60 Гц и амплитудой 20-
40 мм, что в 3-4 раза больше, чем частота колебаний рабочих органов, предназначенных для сбора других ягодных культур. С увеличением частоты колебаний рабочего органа до 60 Гц рабочий орган машины быстрее выходит из строя.
Цель изобретения - повышение долговечности рабочего органа.
Это достигается тем, что каждый из полухомутов выполнен в виде двух плоских
полуколец, на расположенных друг напротив друга боковых поверхностях которых выполнены полукруглые радиальные канавки, образующие отверстия, в которых установлены круглые пальцы, причем полукольца установлены с зазором относительно друг друга, а отйЬшёНйе величины заделки пальца по всей его длине равно отношению величины зазора- между полукольцами к общей толщине полухомута и равно 1/11.
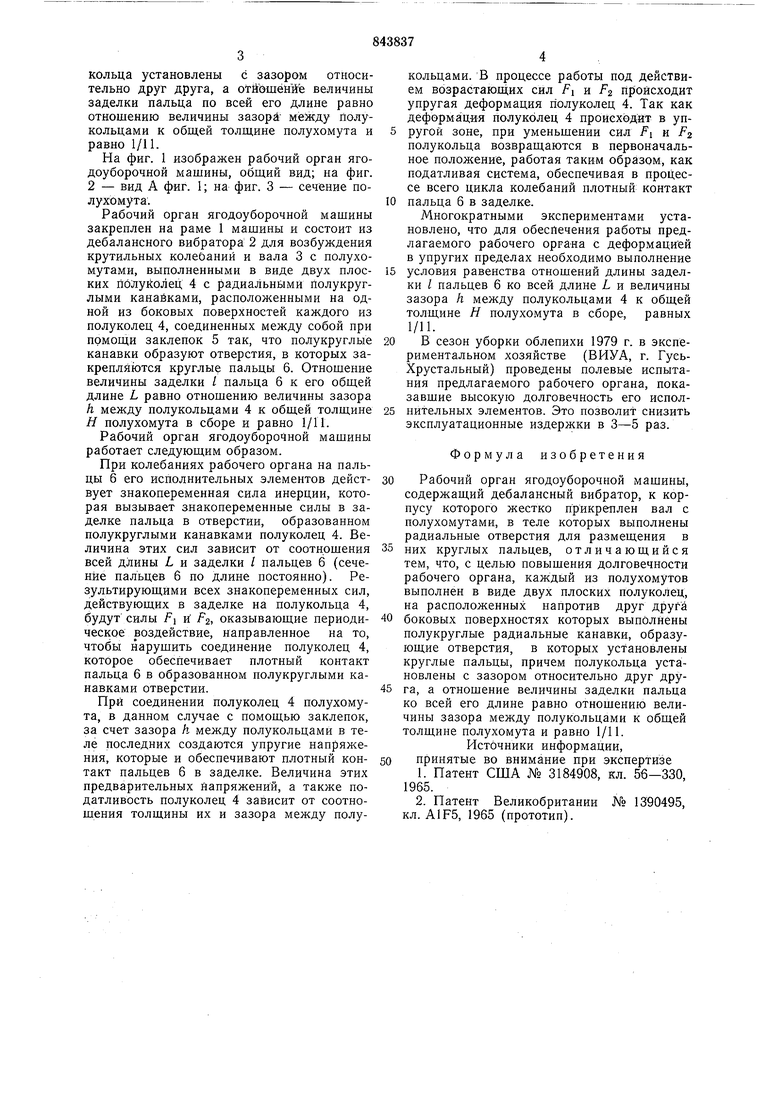
На фиг. 1 изображен рабочий орган ягодоуборочной машины, общий вид; на фиг. 2 - вид А фиг. 1; на фиг. 3 - сечение полухомута.
Рабочий орган ягодоуборочной машины закреплен на раме 1 машины и состоит из дебалансного вибратора 2 для возбуждения крутильных колебаний и вала 3 с полухомутами, выполненными в виде двух плоских полуколец 4 с радиальными йолукруглыми канайками, располол ;енными на одной из боковых поверхностей каждого из полуколец 4, соединенных между собой при помощи заклепок 5 так, что полукруглые канавки образуют отверстия, в которых закрепляк)тся круглые пальцы 6. Отношение величины заделки / пальца 6 к его общей длине L равно отношению величины зазора h между полукольцами 4 к общей толщине Я полухомута в сборе и равно 1/11.
Рабочий орган ягодоуборочной машины работает следующим образом.
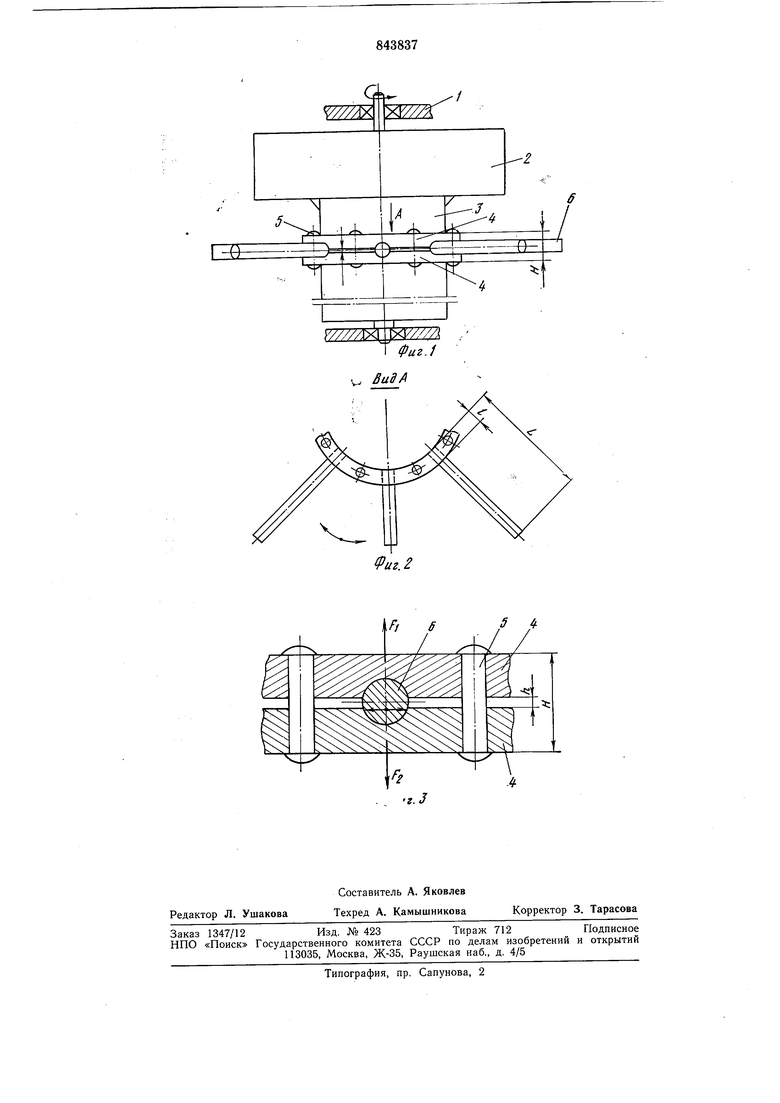
При колебаниях рабочего органа на пальцы 6 его исполнительных элементов действует знакопеременная сила инерции, которая вызывает знакопеременные силы в заделке пальца в отверстии, образованном полукруглыми канавками полуколец 4. Величина этих сил зависит от соотношения всей длины L и заделки / пальцев 6 (сечение пальцев 6 по длине постоянно). Результирующими всех знакопеременных сил, действующих в заделке на полукольца 4, будут силы F и FZ, оказывающие периодическое воздействие, направленное на то, чтобы нарушить соединение полуколец 4, которое обеспечивает плотный контакт пальца 6 в образованном полукруглыми канавками отверстии.
При соединении полуколец 4 полухомута, в данном случае с помощью заклепок, за счет зазора h между полукольцами в теле последних создаются упругие напряжения, которые и обеспечивают плотный контакт пальцев 6 в заделке. Величина этих предварительных Напряжений, а также податливость полуколец 4 зависит от соотношения толщины их и зазора между полукольцами. В процессе работы под действием возрастающих сил FI и F, происходит упругая деформация полуколец 4. Так как деформация полуколец 4 происходит в упругой зоне, при уменьшении сил FI и FZ полукольца возвращаются в первоначальное положение, работая таким образом, как податливая система, обеспечивая в процессе всего цикла колебаний плотный контакт
пальца 6 в заделке.
Многократными экспериментами установлено, что для обесйечения работы предлагаемого рабочего органа с деформацией в упругих пределах необходимо выполнение
условия равенства отношений длины заделки / пальцев 6 ко всей длине L и величины зазора h между полукольцами 4 к общей толщине Я полухомута в сборе, равных 1/11.
В сезон уборки облепихи 1979 г. в экспериментальном хозяйстве (ВИУА, г. ГусьХрустальный) проведены полевые испытания предлагаемого рабочего органа, показавшие высокую долговечность его исполнительных элементов. Это пoзвoлиt снизить эксплуатационные издержки в 3-5 раз.
Формула изобретения
Рабочий орган ягодоуборочной машины, содержащий дебалансный вибратор, к корпусу которого жестко прикреплен вал с полухомутами, в теле которых выполнены радиальные отверстия для размещения в
них круглых пальцев, отличающийся тем, что, с целью повышения долговечности рабочего органа, каждый из полухомутов выполнен в виде двух плоских полуколец, на расположенных напротив друг друГа
боковых поверхностях которых выполнены полукруглые радиальные канавки, образующие отверстия, в которых установлены круглые пальцы, причем полукольца установлены с зазором относительно друг друга, а отношение величины заделки пальца ко всей его длине равно отношению величины зазора между полукольцами к общей толщине полухомута и равно 1/11. Источники информации,
принятые во внимание при экспертизе
1.Патент США № 3184908, кл. 56-330, 1965.
2.Патент Великобритании № 1390495, кл. A1F5, 1965 (прототип).
Фиг.1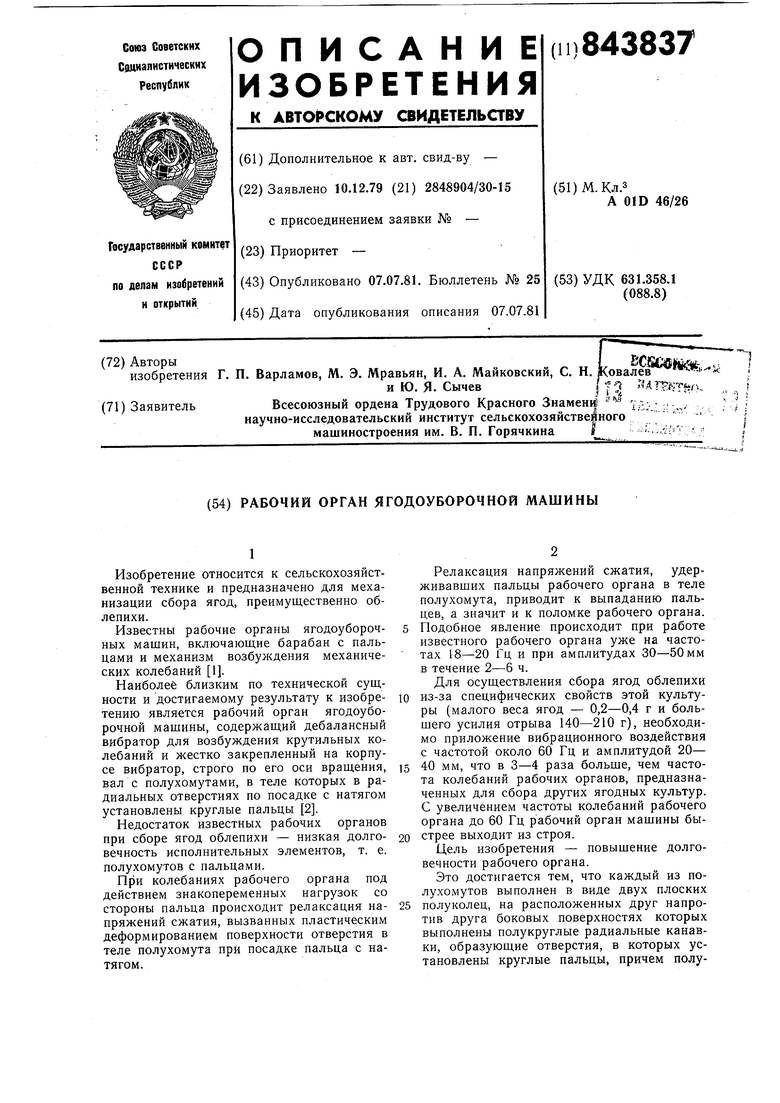
5 4
// 6
.«
