1
Изобретение относится к погрузочно-разгрузочным устройствам и может использоваться при разгрузке насыпных грузов из крытых железнодорожных вагонов.
Известна машина для выгрузки насып- 5 ных материалов из крытых железнодорожных вагонов, содержащая платформу, несущую поворотные в вертикальной плоскости заборный орган и желоб (1.
Однако эта машина обладает относитель- Ю но низкой производительностью, которая обусловлена значительной продолжительностью каждого цикла разгрузки.
Цель изобретения - повышение производительности машины.15
Достигается это тем, что машина снабжена подъемной и поворотной в вертикальной плоскости емкостью, связанной с приводом и размещенной между заборным органом и желобом, и механизмом синхронизации дви- 20 жения заборного органа, емкости и желоба.
Кроме того, указанный механизм синхронизации может содержать полиспаст, соединяющий заборный орган с емкостью, и рычаг, одно плечо которого шарнирно свя- 25 зано с желобом, а другое установлено с возможностью взаимодействия с емкостью.
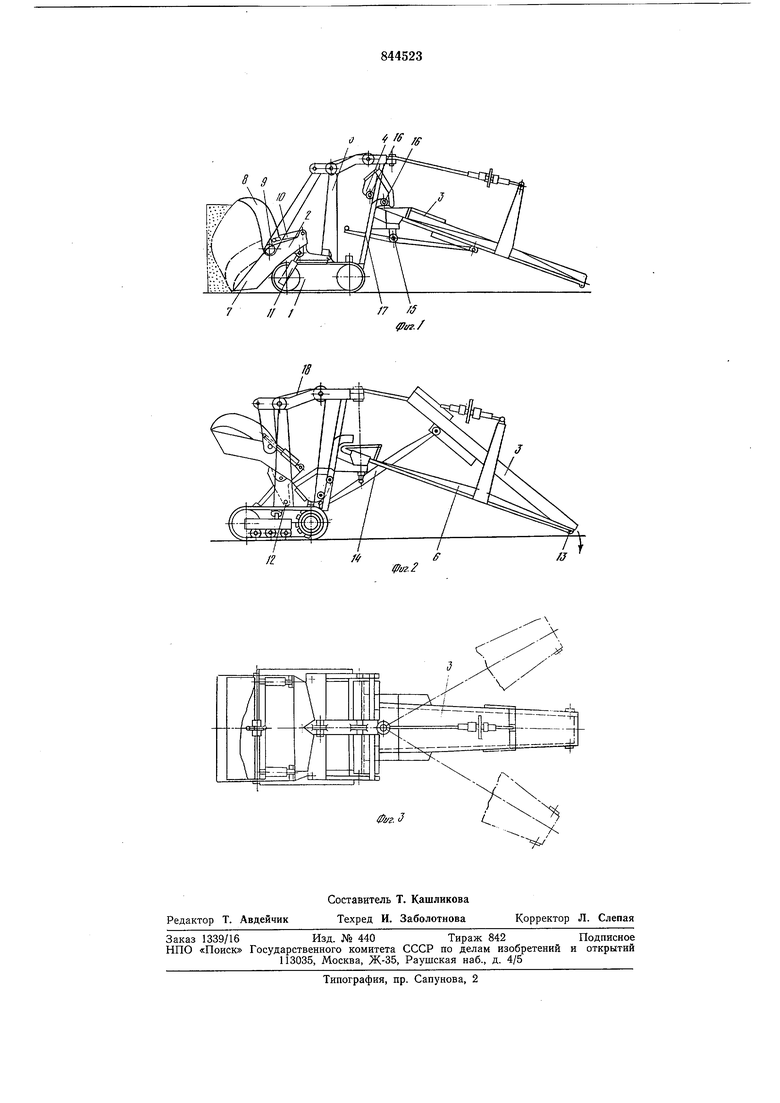
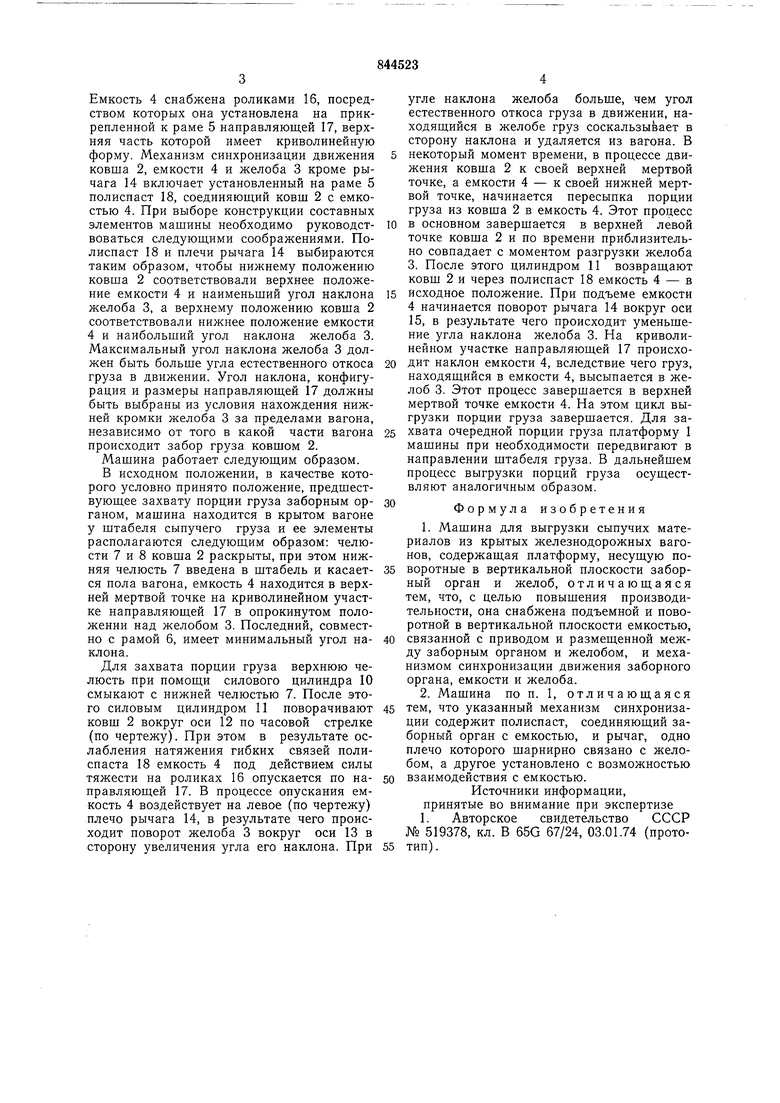
На фиг. 1 изображена мащина для выгрузки сыпучих материалов из крытых железнодорожных вагонов в процессе забора 30
груза ковшом и перегрузки из емкости в желоб, на фиг. 2 - то же, вид сбоку в процессе перегрузки груза из ковша в емкость и разгрузки желоба; на фиг. 3 - то же, вид сверху.
Машина для выгрузки сыпучих грузов из крытых железноророжных вагонов включает платформу 1, несущую заборный орган, выполненный в виде двухчелюстного поворотного ковша 2, желоб 3, подъемную и поворотную в вертикальной плоскости емкость 4, размещенную между ковшом 2 и желобом 3, и механизм синхронизации движения ковша 2, емкости 4 и желоба 3. На платформе 1 смонтирована рама 5 с поворотной вокруг вертикальной оси рамой 6. Ковш 2 содержит нижнюю и верхнюю челюсти 7 и 8, при этом верхняя челюсть 8 установлена с возможностью поворота вокруг горизонтальной оси 9 посредством силового цилиндра 10. Ковш 2 шарнирно опирается на силовой цилиндр 11 и закреплен на раме 5 с возможностью поворота вокруг горизонтальной оси 12. Желоб 3 шарнирно закреплен на раме 6 посредством горизонтальной оси 13 и опирается на правое (по чертежу) плечо рычага 14, установленного на оси 15 рамы б, при этом левое плечо рычага 14 установлено на пути перемещения емкости 4 из одного крайнего положения в другое.
Емкость 4 снабжена роликами 16, посредством которых она установлена на прикрепленной к раме 5 направляющей 17, верхняя часть которой имеет криволинейную форму. Механизм синхронизации движения ковша 2, емкости 4 и желоба 3 кроме рычага 14 включает установленный на раме 5 полиспаст 18, соединяющий ковш 2 с емкостью 4. При выборе конструкции составных элементов машины необходимо руководствоваться следующими соображениями. Полиспаст 18 и плечи рычага 14 выбираются таким образом, чтобы нижнему положению ковша 2 соответствовали верхнее положение емкости 4 и наименьший угол наклона желоба 3, а верхнему положению ковша 2 соответствовали нижнее положение емкости 4 и наибольший угол наклона желоба 3. Максимальный угол наклона желоба 3 должен быть больше угла естественного откоса груза в движении. Угол наклона, конфигурация и размеры направляющей 17 должны быть выбраны из условия нахождения нижней кромки желоба 3 за пределами вагона, независимо от того в какой части вагона происходит забор груза ковшом 2.
Машина работает следующим образом.
В исходном положении, в качестве которого условно принято положение, предшествующее захвату порции груза заборным органом, машина находится в крытом вагоне у штабеля сыпучего груза и ее элементы располагаются следующим образом: челюсти 7 и 8 ковша 2 раскрыты, при этом нижняя челюсть 7 введена в штабель и касается пола вагона, емкость 4 находится в верхней мертвой точке на криволинейном участке направляюшей 17 в опрокинутом положении над желобом 3. Последний, совместно с рамой 6, имеет минимальный угол наклона.
Для захвата порции груза верхнюю челюсть при помощи силового цилиндра 10 смыкают с нижней челюстью 7. После этого силовым цилиндром 11 поворачивают ковш 2 вокруг оси 12 по часовой стрелке (по чертежу). При этом в результате ослабления натяжения гибких связей полиспаста 18 емкость 4 под действием силы тяжести на роликах 16 опускается по направляющей 17. В процессе опускания емкость 4 воздействует на левое (по чертежу) плечо рычага 14, в результате чего происходит поворот желоба 3 вокруг оси 13 в сторону увеличения угла его наклона. При
угле наклона желоба больше, чем угол естественного откоса груза в движении, находяшийся в желобе груз соскальзывает в сторону наклона и удаляется из вагона. В
некоторый момент времени, в процессе движения ковша 2 к своей верхней мертвой точке, а емкости 4 - к своей нижней мертвой точке, начинается пересыпка порции груза из ковша 2 в емкость 4. Этот процесс
в основном завершается в верхней левой точке ковша 2 и по времени приблизительно совпадает с моментом разгрузки желоба 3. После этого цилиндром 11 возвращают ковш 2 и через полиспаст 18 емкость 4 - в
исходное положение. При подъеме емкости 4 начинается поворот рычага 14 вокруг оси 15, в результате чего происходит уменьшение угла наклона желоба 3. На криволинейном участке направляющей 17 происходит наклон емкости 4, вследствие чего груз, находящийся в емкости 4, высыпается в желоб 3. Этот процесс завершается в верхней мертвой точке емкости 4. Па этом цикл выгрузки порции груза завершается. Для захвата очередной порции груза платформу 1 машины при необходимости передвигают в направлении штабеля груза. В дальнейшем процесс выгрузки порций груза осушествляют аналогичным образом.
Формула изобретения
1.Машина для выгрузки сыпучих материалов из крытых железнодорожных вагонов, содержащая платформу, несущую поворотные в вертикальной плоскости заборный орган и желоб, отличающаяся тем, что, с целью повышения производительности, она снабжена подъемной и поворотной в вертикальной плоскости емкостью,
связанной с приводом и размещенной между заборным органом и желобом, и механизмом синхронизации движения заборного органа, емкости и желоба.
2.Машина по п. 1, отличающаяся тем, что указанный механизм синхронизации содержит полиспаст, соединяющий заборный орган с емкостью, и рычаг, одно плечо которого щарнирно связано с желобом, а другое установлено с возможностью
взаимодействия с емкостью.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 519378, кл. В 65G 67/24, 03.01.74 (прототип).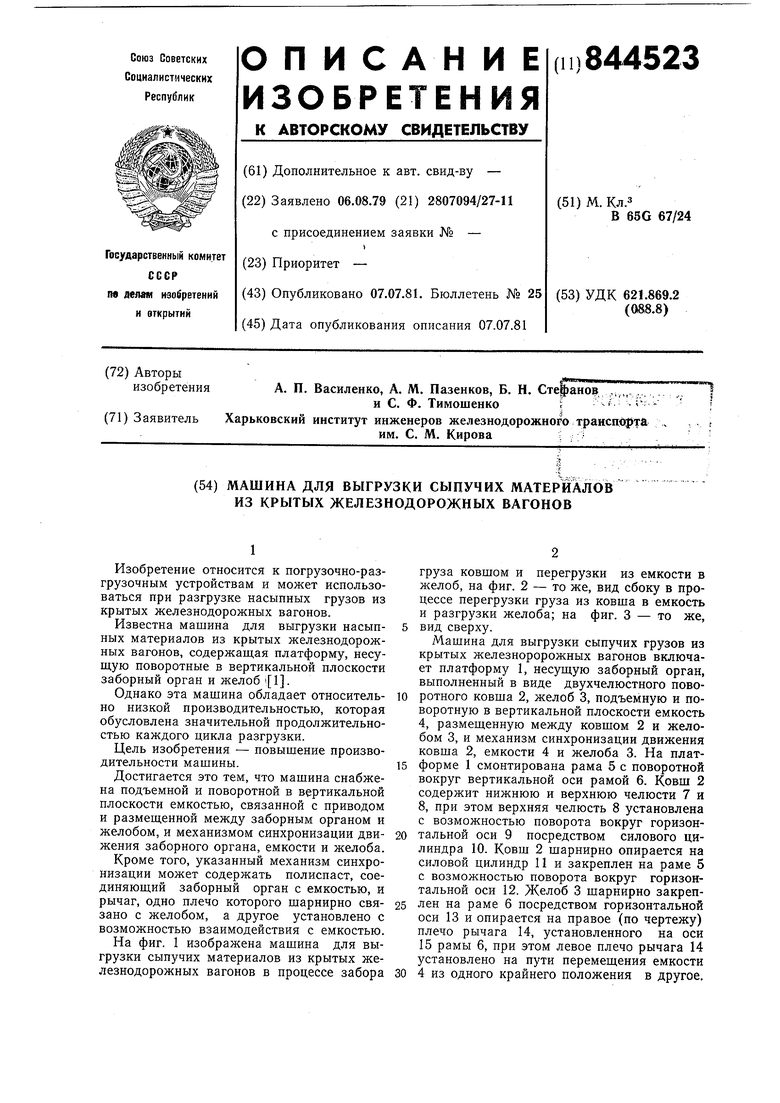
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для выгрузки слежавшихся сыпучих грузов из крытых железнодорожных вагонов | 1979 |
|
SU863497A1 |
| Устройство для выгрузки слежавшихся сыпучих грузов из крытых железнодорожных вагонов | 1982 |
|
SU1074784A2 |
| МАШИНА ДЛЯ РАЗГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ ПОЛУВАГОНОВ | 2005 |
|
RU2279396C1 |
| Устройство для погрузки и разгрузки штучных грузов | 1983 |
|
SU1152905A1 |
| Устройство для выгрузки сыпучих грузов из крытых железнодорожных вагонов | 1983 |
|
SU1081103A1 |
| Устройство для выгрузки сыпучих грузов из крытых железнодорожных вагонов | 1990 |
|
SU1782897A1 |
| Передвижная самоходная машина для перегрузки сыпучих материалов, предназначенная преимущественно для разгрузки крытых железнодорожных вагонов | 1957 |
|
SU111080A1 |
| Устройство для выгрузки грузов из вагонов | 1987 |
|
SU1516435A1 |
| МАШИНА ДЛЯ РАЗГРУЗКИ СЫПУЧЕГО ГРУЗА ИЗ ПОЛУВАГОНОВ | 2006 |
|
RU2318717C2 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ СЫПУЧИХ и КУСКОВЫХ МАТЕРИАЛОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 1968 |
|
SU213684A1 |