(54) ПРИВОДНОЙ ВИНТОВСЙ РОЛИК РОЛЬГАНГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводной винтовой ролик рольганга (его варианты) | 1979 |
|
SU854831A1 |
| Приводной винтовой ролик рольганга | 1982 |
|
SU1114599A1 |
| Ролик рольганга | 1977 |
|
SU695912A1 |
| Приводной винтовой ролик рольганга | 1979 |
|
SU796102A1 |
| Узел приводного рольганга | 1983 |
|
SU1143672A1 |
| Рольганг | 1979 |
|
SU796093A1 |
| Ролик рольганга для сбрасывания грузов | 1984 |
|
SU1221104A1 |
| Приводной винтовой ролик рольганга | 1977 |
|
SU630156A1 |
| Ролик рольганга | 1983 |
|
SU1155531A1 |
| Узел приводного рольганга | 1980 |
|
SU931604A1 |
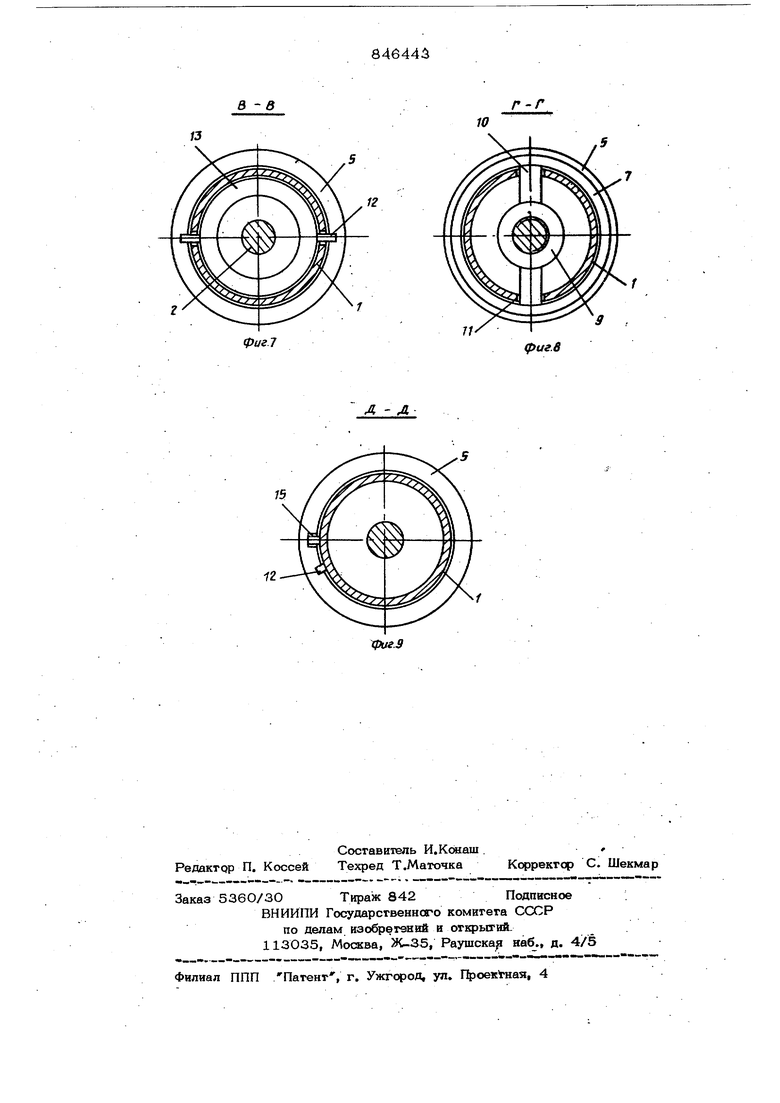
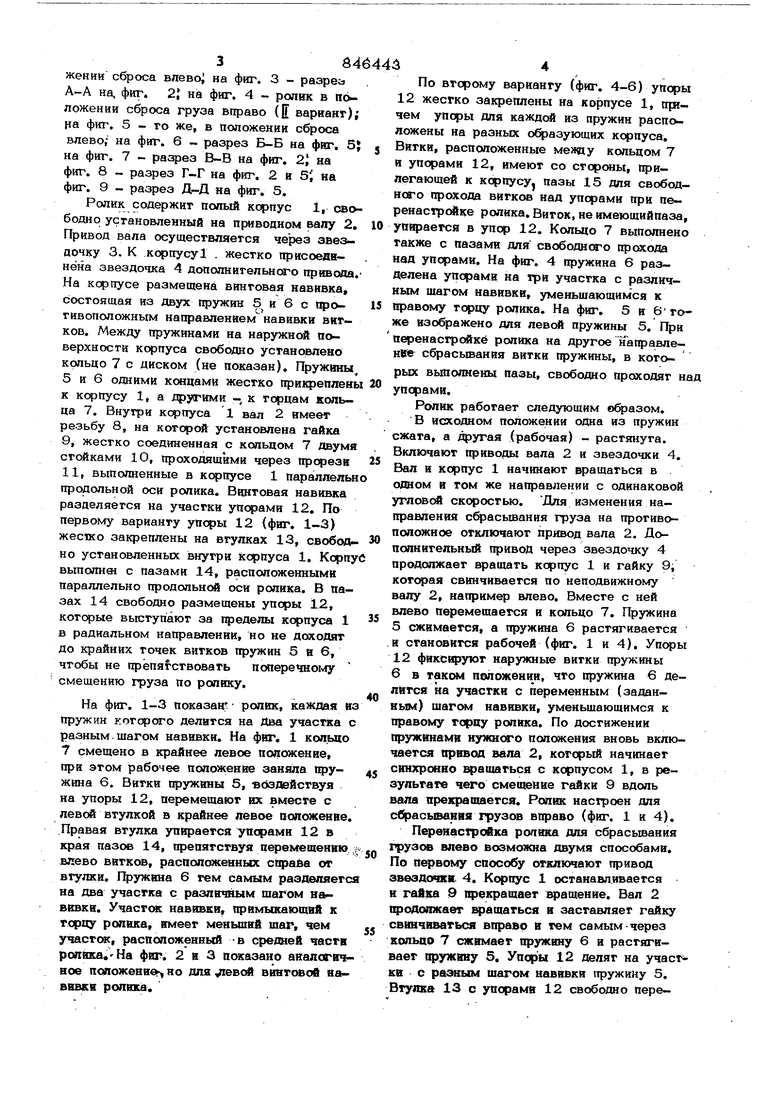
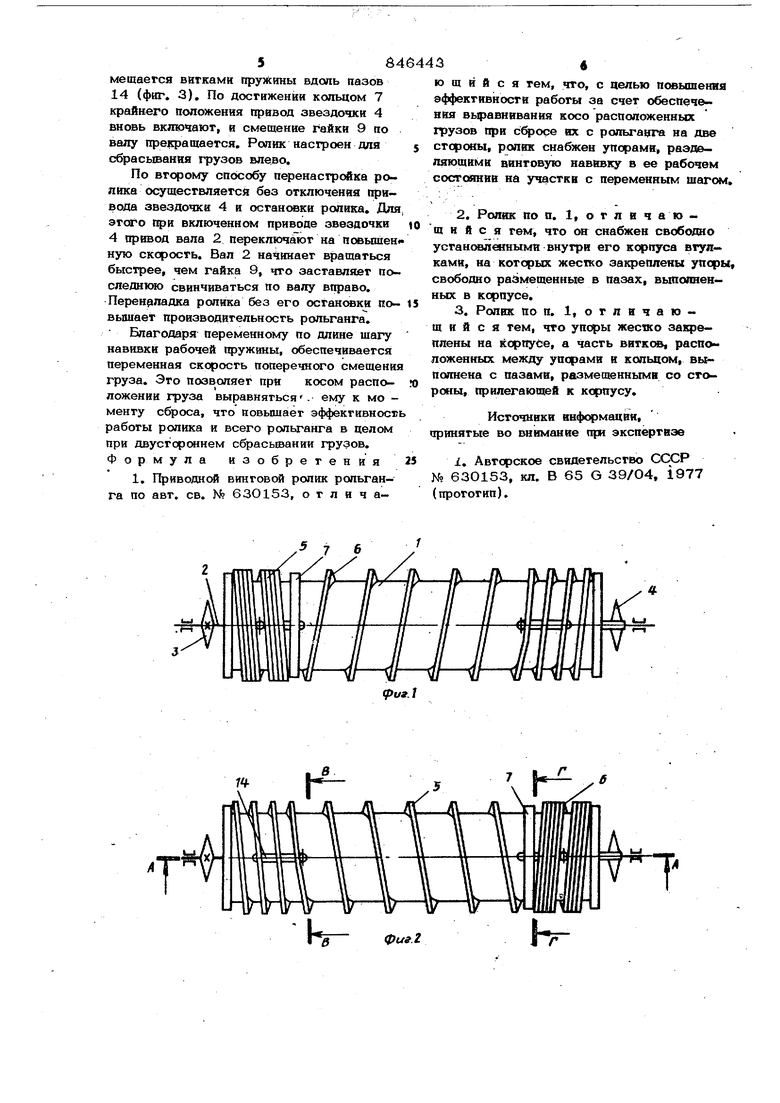
Изобрегение огносигся к промьгшлен-. ному транспорту, а именно к приводным винтовым роликам рольгангов. По основному авт. св. № 630153 из вестен приводной винтовой ролик рольганг содержащий приводной вал, полый корпус винтовой навивкой, выполненной из двух; пружин с противоположным расположение витков, кольцо, свободно установленное на наружной поверхности корпуса между пружинами, установленный внутри корпуса диск, жестко соединенньй с кольцом причем пружины одними концами жестко прикреплены к корпусу, а другими - к трэдам кольца, где ролик снабжен допол нительным цепным приводом, звездочка которого жестко закреплена на корпусе, а приводной вал в средней част выполнен резьбовым и на нем размешена гайка, связанная с корпусом и жестко соединен- ная с кольцом ролика l. Однако указанная конструкция ролика не обеспечивает выравнивание косо расположенных грузов при сбросе юс с рольганга на две стфоны, что снижает эффективность его работы. Целью изобретения является повьппение эффективности работы ролика за счет обеспечения выравнивания косо располо- женных грузов при сбросе их с рольганга на две стороны. Эта цель достигается тем, что ролкк снабжен упорами, разделяющими винтовую навивку в ее рабочем состоянии на участки с переменным шагом. По одному из вариантов ролик снабжен свободно установленными внутри его корпуса втулками, на которых жестко закреплены упоры, свободно размещенные в пазах, выполненных в корпусе. По второму варианту упоры жестко закреплены на корпусе, а часть витков, расположенных между упорами и кольцом выполнена с пазами, размещенными со стороны, тфилегающей к корпусу, На фиг. 1 изображен ролик в положении сброса груза вправо, общий вид (1 вариант); на фиг. 2 - то же, в положении сброса влево на фиг, 3 - разреа А-А на. фиг. 2J на фиг. 4 - ролик в положении сброса груза вправо (Е вариант); на фиг, 5-го же, в положении сброса влево; на фиг. 6 - разрез Б-Б на фиг. 5} на фиг. 7 разрез В-В на фиг. 2) на фиг. 8 - разрез Г-Г на фиг. 2 и Si на фиг. 9 - разрез Д-Д на фиг. 5.
Ролик содержит полый корпус 1, свободно установленный на приводном валу 2, Привод вала осуществляется через звезаочку 3. К корпусу . жестко присоединена звездочка 4 дополнительного привода. На корпусе размещена винтовая навивка, состоящая из двух пружин 5 и 6 с ttpoтивоположным направлением навивки витков. Между пружинами на наружной поверхности корпуса свободно установлено кольцо 7 с диском (не показан). Пружины 5 и 6 одними ксжцами жестко прикреплены к 1, а другими -, к торцам кольца 7. Внутри корпуса 1 вал 2 имеет резьбу 8, на которой установлен а гайка 9, жестко соединенная с кольцом 7 двумя стойками 1О, проходящими через прорези 11, выполненные в корпусе 1 параллельн продольной оси ролика. Винтовая навивка разделяется на участки упорами 12, По первому варианту упоры 12 (фиг. 1-3) жестко закреплены на втулках 13, свободно установленных 1внутри корпуса 1. Корпу выпопнш с пазами 14, расположенными параллельно продольной оси ролика. В пазах 14 свободно размещены упоры 12, выступают за пределы корпуса 1 в радиальном направлении, но не доходят до крайних точек витков пружин 5 и 6, чтобы не препятствовать попере4HOivfy
смещению груза по ролику. На фиг. 1-3 показан ролик, каждая из
пружин которого делится на Два участка с разным.шагом навивки. На фиг« 1 коп.ьцо 7 смещено в крайнее левое положение, при этом рабочее положение заняла пружина 6. Витки пружины 5, воздействуя на упоры 12, перемещают их вместе с левой втулкой в крайнее левое положение. Правая втулка упирается упорами 12 в края паз(ж 14, препятствуя перемешению влево витков, расположенных С1фава от втушси. Пружина 6 тем самым разделяетс на два участка с различным шагом навивки. Участсж навивки, примыкающий к торцу ролика, имеет меньший шаг, чем участок, расположенный -в средней частв ропика.На фиг. 2 и 3 показано аналогичное попожени€ но для евсЛ винтовой навнвкв ролика.
По второму варианту (фиг. 4-6) упоры 12 жестко закреплены на корпусе 1, причем упоры для каждсй из пружин расположены на разных о азуюших корпуса. Витки, расположенные кольцом 7 и упорами 12, имеют со стороны, прилегающей к корпусу пазы 15 для свободного прохода витков над упфами при перенастрЫ1ке ролика. Виток, не имеющийпаза, упирается в упор 12. Кольцо 7 выполнено также с пазами для свободного прохода над упорами. На фиг. 4 пружина 6 разделена упорами на три участка с различным шагом навивки, уменьшающимся к правому торцу ролика. На фиг. 5 и 6 тоже изображено для левой пружины 5. При перенастрс кё ролика на другое направлеHBfe сбрасьтания витки пружины, в которых выполнены пазы, свободно проходят н упчэами.
Ролик работает следующим офазом.
В исходном положении одна из пружин сжата, а другая (рабочая) - раст5гаута. Включают приводы вала 2 и звездочки 4. Вал и корпус 1 начинают вращаться в одном и том же направлении с одинаковой угловсЛ скоростью. Для изменения направления сбрасьюания груза на противоположное отключают привод вала 2. Дополнительный привод через звездочку 4 продолжает вращать корпус 1 и гайку 9, которая свинчивается по неподвижному валу 2, например влево. Вместе с ней влево перемещается и кольцо 7. Пружина
5сжимается, а пружина 6 растягивается ,И становится рабочей (фиг. 1 и 4). Упоры
12 фиксируют наружные витки пружины
6в таксм положении, что пружина € делится на участки с переменным (заданным) шагом навивки, уменьшающимся к правому торцу ролика. По достижении пружинами нужного положения вновь включается вривод вала 2, который начинает синхронно решаться с корпусом 1, в результате чего смещение гайки 9 вдоль вала прекращается. Ролик настроен для сбрасывания грузов вправо (фиг. 1 и 4).
Перенастройка ролика для сбрасывания грузсф влево возможна двумя способами. По первому способу отключают привод эвездочкя 4. Корпус 1 останавливается и гайка 9 прекращает вращение. Вал 2 продолжает 1фащаться и заставляет гайку свинчиваться вправо и тем самым-через кольоо 7 сжимает пружину 6 и растягивает пружвну 5. Упоры 12 делят на учасгKB с разным шагом навивки пружину 5. Втулка 13 с упорами 12 свободно пере56мешаегся вигками ггрут сины вдоль пазов 14 (фнг. 3). По досгижении кольцом 7 крайнего положения прввод звездочки 4 вновь включают, и смешение гайки 9 по валу прекращается. Рояик настроен для сбрасьюания грузов влево. По втсчэому способу перенастрЫ1ка ролика осуществляется без отключения привода звездочки 4 и остановки ролика. Для этого при включенном приводе звезаочкн 4 привод вала 2 переключают на повьпиен ную скорость. Вал 2 начинает вращаться быстрее, чем гайка 9, что заставляет последнюю свинчиваться по валу вправо. Перенрладка ролика без его остансшки повьоиает производительность рольганга Благодаря переменному по длине шагу навивки рабочей пружины, обеспечивается переменная скорость поперечного смещени груза. Это позволяет при косом расположении груза выравняться. ему к моменту сброса, что повьшает эффективност работы ролика и всего рольганга в делом при двустороннем сбрасьюании грузов. Формула изобретения 1. Приводной винтовой ролик рольганга по авт. св. № 63О153, отлича3ющийся тем, что, с целью повышения эффективности работы за счет обеспечения выравнивания косо расположенных грузов при сбросе их с рольга1лга на две стсршы, ролик снабжен упорами, разделяющими винтовую навивку в ее рабочем состоянии на участки с переменным шагом. 2.Ролик по п. 1, отличающий с я тем, что он снабжен свободно установленными внутри его корпуса втулками, на которых жестко закреплены упоры, свободно размещенные в пазах, выполненных в корпусе. 3.Ролик по п. 1, о т л и ч а ю щ и и с я тем, что упоры жеспсо закреплены на корпусе, а часть витке, расположенных между упорами и кольцом, Bbtполнена с пазами, размещенными со стороны, прилегающей к корпусу. Источники информации, принятые во внимание щя экспертизе 1. Авторское свидетельство СССР № 630153, кл. В 65 G 39/О4, 1977 (прототип).
7 6 7 5 7 . .6. Г
фиг
(риг.В
Л - Л
