(54) СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Система управления | 1984 |
|
SU1215085A1 |
| Релейная система управления | 1980 |
|
SU1001005A1 |
| Система управления | 1984 |
|
SU1215084A2 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Система автоматического управления траекторным движением транспортного средства с функцией курсовой устойчивости | 2019 |
|
RU2724008C1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
Изобретение относится к автоматическому управлению и может быть использовано для управления объектами, параметры которых меняются в широком диапазоне и изменяются условия внешней среды. Требуемое количество регулирования в этих условиях и независимость его от переменных параметров и внешних возмущений достигается за счет организации в системах регулирова1«я скользящего режима. Известны релейные системы автоматического регулирования, в которых обеспечивается скользящий режим. Дви жение их в скользящем режиме не зави сит ни от меняю1цихся параметров объек та, ни от приложенных к объекту внеш них возмущений Г13 Недостаток таких систем заключается в трудности измерения информаци необходимой для организации скользящего режима. Наиболее близкой по технической сущности к предлагаемой является самонастраивающаяся система (СНс) с моделью, содержащая сумматоры, первые входы которых сое/91нены с соответствукащми выходами модели объекта управ ления вторые входы - с соответствующими выходами объекта управления, а выходы - со входами соответствующих усилителей настройки, нелинейной функции и объекта, причем сигнал задания подается одновременно на вход модели и основного контура, а выход репейного злемента и сигнал ошибки основного контура подключены на вход нехшиейной функ1щн Г2. Однако в указанной системе при больших входных сигналах и широком диапазоне изменения коэффициента усиления систем возникает необходимость в стабилизации алгоритма настройки, что тфиводит к малой точности системы, при этом использование СНС с эталонной моделью и комбинированной
настройкой приводит к усложнению системы. Кроме того, при широком диапазоне изменения параметров объекта не удается обеспечить требуемую степень инвариантности к параметрическим возмущениям, система весьма чувствительна к внешним возмущениям, действукгщим на объект регулирования.
Цель изобретения - обеспечение скользящего режима в течение всего времени переходного процесса и инвариантности к параметрическим и внешним возмущениям и упрощение системы регулирования при доступности измерению всех фазовых координат объекта и к повышению точности системы.
Эта цель достигается тем, что система управления содержит релейный эле мент, входы которого соединены с выходами усилителей, а выход подключен ко входу объекта управления.
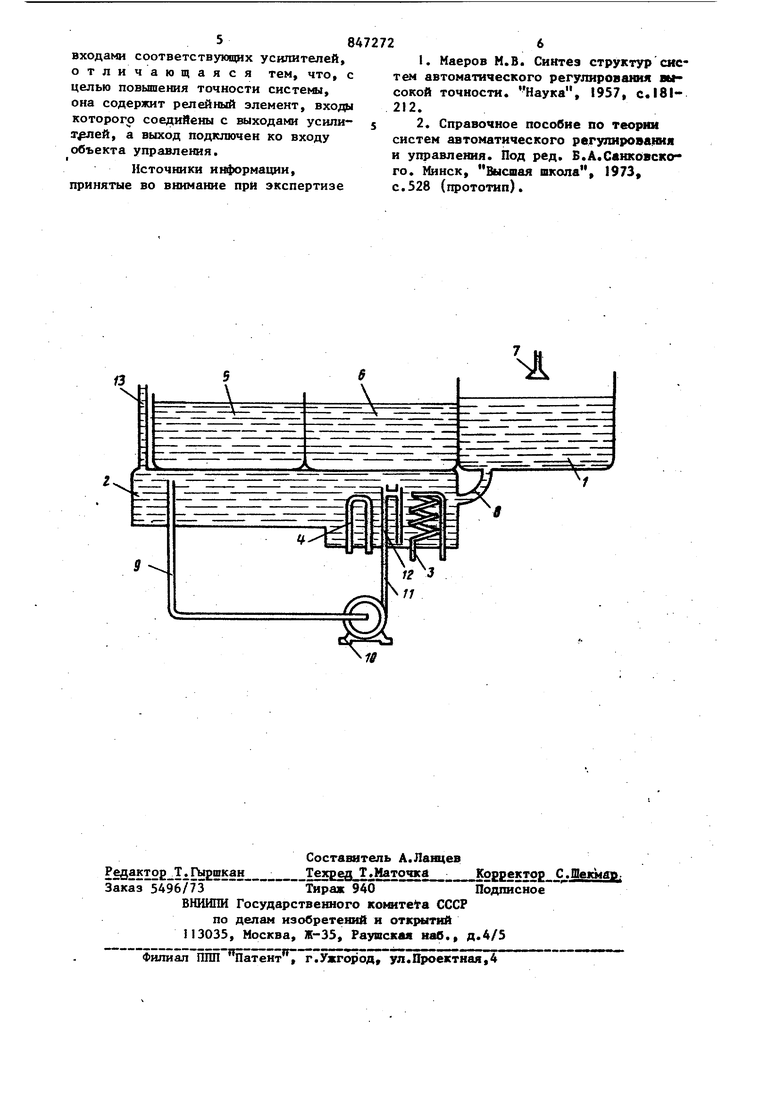
На чертеже представлена предлагаемая схема управления для третьего порядка.
Система содержит модель 1, включающую последовательно соединенные инерционные звенья 2-4, модулирующие свойства объекта, сумматоры 5-7, на входы которых поданы фазовые координаты X, и объекта Х Х, а выходы,представляющие собой отклонения Ч -4,3 через усилители 8-10 подключены ко входу релейного элемента 11, последовательно соединенного с объектом регулирования, включающим инерционные звенья 12 и 13. При этом входной сигнал (сигнал задания) поступает на вход модели, формируя желаемые значения X , фазовых координат объекта
Система работает следукядим обра-зом.
До подачи входного сигнала на модель 1 желаемые значения Х Фазовых координат звеньев 2-4 равных нулю, следовательно, на вход релейного элемента 11 поступает суммарный нулевой сигнал и релейный элемент работает в скользящем режиме. После подачи входного сигнала в модели формируются желаемые значения Х Х фазовых координат объекта, которые могут быть изменены. Текущие (истинные значения фазовыхкоординат Х измеряются в объекте регулирования, В сумматорах 5-7 вычисляются отклонения 1,-г i текущих значений фазо№1х
координат Х от их желаемых значений Хз, т.е.
З э ЗСигналы отклонений 1-,- 4j , усиленные в усилителях 8-10, поступают на вход релейного элемента 11. Поскольку на вход объекта регулировани не подключен входной сигнал, а подключен только выход релейного элемента, то выбором параметров усилителей В - 10 обеспечивают работу релейного элемента 11 при любом входном сигнале. Подачей входного сигнала только на вход модели и исключением главной обратной основного Контура устраняются большие ощибки на входе объекта, а введением дополнительных сумматоров 8 и 9 обеспечивется использование всех фазовьш координат ч , что позволяет при любом входном сигнале, имеющихся параметрах объекта и внешних возмущений, обеспечить практически нулевой сигнал на входе релейного элемента, т.е. обеспечить его работу в скользящем режиме.
Предлагаемая система позволяет обеспечить независимость выходной координаты объекта Х от переменных параметров объекта и внешних возмущений, приложенных к объекту за счет того, что система автоматического регулирования всегда работает в скользящем режиме, строить высококачест,венные системы автоматического регулирования, инвариантные к переменным параметрам объекта и внешним возмущения приложенным к объекту и может найти широкое применение для построения систем стабилизации и следящих систем, работающих в условиях меняющихся воздействий внешней среды, например, 6 системах управления электроприводом, тепловыми процессами, летательными аппаратами.
Формула изобретения
Система управления, содержащая сумматоры, первые входы которых соединены с соответствующими выходами модели объекта управления, вторые входы - с соответствуюошми выходами объекта управления, а выходы - со
входами соответствующих усилителей, отличающаяся тем, что, с целью повьшения точности системы, она содержит репейный элемент, входы которого соединены с выходами усилит лей, а выход подключен ко входу объекта управления.
Источники информации, принятые во внимание при экспертизе
с.528 (прототип).
