Изобретение относится к области автоматического управления и может быть использовано для управления объектами, параметры которых меняютс в широком диапазоне, в частности для управления электроприводом постоянного тока.
Цель изобретения - улучшение качества и повьш1ение точности регулирования.
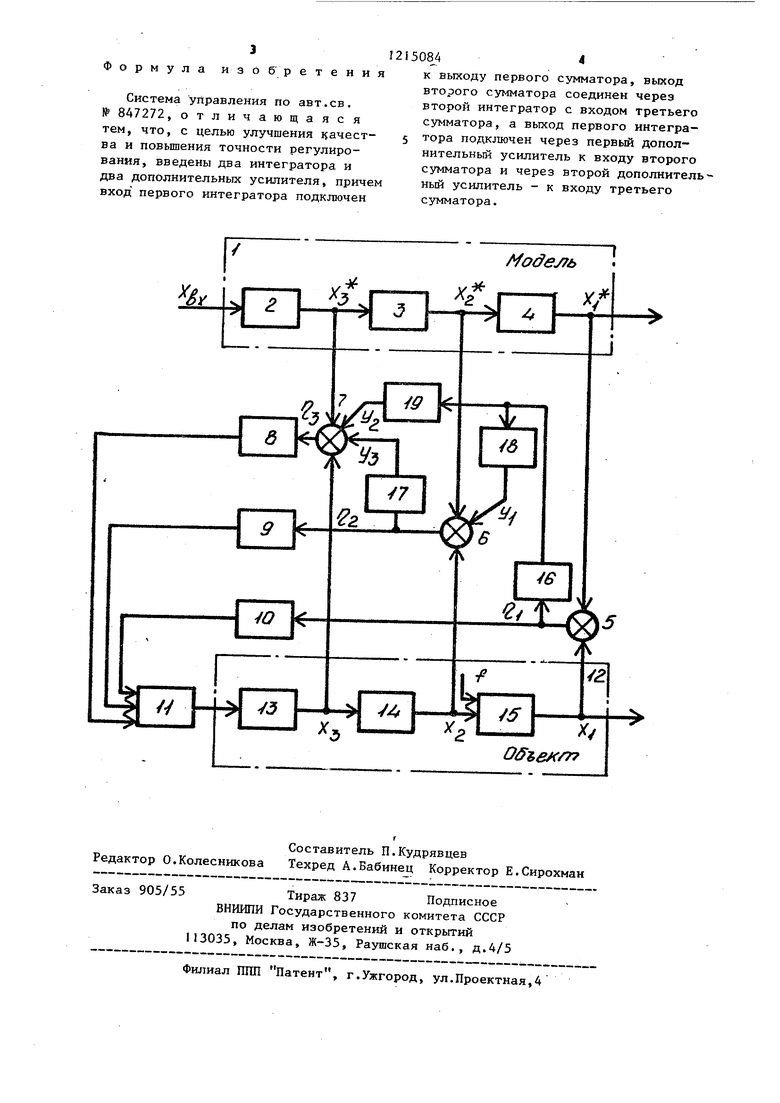
На чертеже представлена блок- схема системы управления.
Система содержит модель 1, состоящую из последовательно соединенных первого - третьего инер1даонных звеньев 2 - 4, первый - третий сумматоры 5 - 7, первый - третий усилители 8 - 10, релейный элемент 11, объект регулирования 12, состоящий и последовательно .соединенных четвер- того - шестого инерционных звеньев 13 - 15, первый и второй интеграторы 16 и 17, первый н второй дополнительные усилители 18 и 19.
Рассмотрим предварительно работу системы по основному изобретению при отработке внешнего возмущения -1, приложенного к третьему входу объекта, т.е. к входу блока 1.5. Пусть до момента приложения i систе- ма находилась в состоянии равновесия т.е. обеспечивалось примерное равен .....
СТВО X , S X
Х, X,
}
(за счет скользящего режима при ис- ;-пользовании релейного элемента 11 или достаточно большого коэффициента усиления при использовании линейного усилителя 1). После приложения возм тцения i выходная координата с, объекта начнет уменьшаться, что приведет к формированию положительной ошибки х - X, . Стремясь отработать эту ошибку, релейный (jrviH линейный элемент 11 увеличивает воздействие на вход объекта, что приведет к увеличению координат Х , Х объекта и, следовательно, к формированию отрицательных ошибок gj
- з J противоречивая информация способствует увеличению длительности переходных процессов и образованию статических ошибок по всем координатам в установившемся режиме.
Система работает следующим образом.
После подачи входного сигнала Хд в модели I формируются желаемые значения
0
5 0
5 о
5
5
X х фазовых координат объекта на выходах звеньев 2-4, которые могут быть измерены. Текущие Гистинные значения фазовых координат X,- X j измеряются в объекте регулирования 13-15. В сумматорах 5-7 вычисляются отклонения {, текущих значений фазовых координат х, - х от их жела- емых значений jf х.
В течение всего времени переходного процесса в зависимости от величины ошибок f , , 2, идет непрерывная коррекция заданных значений X , х j за счет интеграторов 16,17 и усилителей 18,19 таким образом, что Ч %- X, , , Ч,+ У э- X,.
При помощи интеграторов 16,17 ликвидируется статическая ошибка по координатам X,- X в установившемся режиме, а параметры их и усилителей 18, 19 выбирают так, чтобы в течение всего времени переходного процесса обеспечивалось достаточно точное равенство , 0. Сигналы отклонений 1, д поступают на вход релейного элемента 11 . Поскольку на вход блока 11 под-, ключены только отклонения ,- , , то выбором параметров усилителей 8-10 обеспечивают работу релейного элемента 11 в скользящем режиме в течение всего времени переходного процесса. После подачи возмущения f -1 выходная координата х, объекта начнет уменьшаться, что приведет к формированию положительной ошибки , X - f, , которая посредством интегратора I6 и усилителей 18,19 поступает на входы сумматоров 6,7, что приводит к увеличению задания по координатам X , у
Следовательно, на выходах усилителей формируются положительные ошиб- ) 2 причем ошибка посредством интегратора 17 дополнительно увеличивает задание по координате . Теперь сформированы .все ошибки одного знака, поступающие на вход релейного элемента 11, который в скользящем режиме увеличивает воздействие на объект. Это приводит к увеличению координат )f , X и к компенсации влияния возмущения f .
Поскольку в системе устранены противоречия и все ошибки j имеют один знак, то переходный про- цесс затухает быстрее, чем в известной системе, и устраняется статическая ошибка.
Формула изобретения
Система управления по авт.св. № 847272, отличающаяся тем, что, с целью улучшения качества и повышения точности регулирования, введены два интегратора и два дополнительных усилителя, причем вход первого интегратора подключен
Составитель П.Кудрявцев Редактор О.Колесникова Техред А.Бабинец Корректор Е.Сирохман
905/55
Тираж 837 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий II3035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ШШ Патент, г.Ужгород, ул.Проектная,4
1215084
к выходу первого сумматора, выход второго сумматора соединен через второй интегратор с входом третьего сумматора, а выход первого интегратора подключен через первый дополнительный усилитель к входу второго сумматора и через второй дополнительный усилитель - к входу третьего сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Система управления | 1979 |
|
SU847272A1 |
| Система управления | 1984 |
|
SU1215085A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
Изобретение представляет собой усовершенствование технического решения по а.с. № 847272 и может быть использовано для управления электроприводом постоянного, тока. Цель изобретения состоит в улучшении качества и точности регулирования. Для этого синтезируется управление, обеспечивающее астатизм некоторой группы фазовых координат, и скользящий режим релейного блока. В систему дополнительно введены два синтезатора и два усилителя по числу фазовых координат, для которых необходимо обеспечить астатизм. Отсутствие больших отклонений сигнала на входе релейного блока позволяет избежать срывов скользящего режима. 1 ил. о
| Система управления | 1979 |
|
SU847272A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
