Изобретение относится к автоматическому управлению и может быть использовано для управления объектами,, параметры которьк меняются в широком диапазоне и изменяются в условиях внешней среды, а также при невозможности -измерения промежуточных фазовых координат объекта.
Цель изобретения - повышение точности регулирования.
На чертеже представлена блок-, схема системы для частного случая п 3.
Система содержит релейный регулятор 1, объект управления 2, состоящий из п инерционных звеньев 3(5 3 , ,. 3 ., модель 4 объекта управления, И -ь1 сумматор 5j , 5
, VI +1, усилитель ,,.6„
и обратную модель 7 объекта.
Модель 4 состоит из последовател но соединенных инерционных звеньев
8 о о ., э о 2 . «о (.
Обратная модель 5 состоит из п последовательно соединенных диффе-. ренцир ующих звеньев 9,, Э --Система работает следующим образом .- . До подачи задающего сигнала X
9ад
на вход модели 4 желаемые значения
фазовых координат X . - X , равны ,, )(
Hyjno. Фазовые координаты Х « ЗД
обратной модели также равны нулю, так как выходной сигнал с выхода объекта управления 2 равен нулю. Следовательно, на входы релейного регулятора 1 поступают с выходов усилителей 6 , - 6 ц. нулевые сигналы я релейный регулятор работает,в скользящем режиме. После подачи задающего сигнала X д. в Модели 4
формируются желаемые значения фазо-
вых координат х,
- X.
объекта. Текутцее значение выходной координаты объекта к измеряется на выходе объекта регулирования. Этот сигнал поступает на сумматор 5,, где срав- нивается с выходной координатой модели 4 х. 5 а также на вход обратной модели 7, в которой формируются фазовые координаты х , и обратной модели. Сигналы х и соответствуют промежуточным фазовым координатам объекта X, и х, В сх ыматорах 5, и 5 вычисляются отклонения ( -х)и()( -х), которы через усилители 6 . и 6 поступают на вхо,цы релейного регулятора 1 .
2
На вход релейного регулятора 1 через усилитель 6, с выхода сумматора 5 поступает отклонение(х Х.,). Кроме того, на выходе обратной моде5 ли 7 формируется сигнал звд представляющий собой такой задающий сигнал, который необходимо было бы подать на вход модели 4, чтобы на ее выходе был сигнал х, равный выходtO ной координате объекта х „,. Сигнал
,
,-if
BblX
X ад несет информацию как о возмущениях, действующих на объект 2, так и
0производных от них. Этот сигнал
в сумматоре сравнивается с задаю- 15 щим сигналом х ,ад и через усилитель 6 поступает на вход регулятора 5 выход которого подключен на вход объекта 2. При таком построении системы управления увеличивается на 20 единицу число фазовых координат, несущих информацию о состоянии объекта 2.На вход регулятора I поступают как отклонения текущих значений фазовых координат объекта, так и отклонение 25 дополнительной фазовой координаты
л-V- ,
X ,о,д , несущей информацию о возмущениях, действующих на объект от задающего сигнала Такое формирование сигнала управления релейным
30 регулятором 1 обеспечивает неболь- 5пие отклонения текущих значений фазовых координат объекта как от параметрических, так и от внешних возму- щений ограниченной амплитуды, дей35 ствуюпщх на звенья объекта регулирования. На входе релейного регулятора
1практически обеспечивается нулевой сигнал, что обусловливает его работу в скользящем режиме.
40
Формула изобретения
Система управления, содержащая
релейный регулятор, подключенный )
45 к входу объекта управления, состоящего из П последовательно соединен- , ных инерционных звеньев, модель объекта управления, f сумматоров, первые входы которых соединены с со50 ответствзгюпщми fi выходами модели объекта управления, а выходы подключены к входам соответствующих п усилителей, вход модели объекта управления соединен с первым входом
55 {п+1)-го сумматора, подключенного выходом к входу ( h+1)-го усилителя, выходы И + усилителей соединены ,с соответствующими входами релейнего регулятора, отличающаяся тем, что, с целью повьше- ния точности регулирования, введена обратная модель объекта, вход которой соединен с выходом объекта
Составитель П.Кудрявцев Редактор О.Колесникова Техред А.Бабинец Корректор Л.Пилипенко
905/55
Тираж 837Подписное
ВНИИПИ Государственного комитета СССР
по дела изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ШШ Патент, г.Ужгород, ул.Проектная,4
управления и с вторым входом первого сумматора, а каждый г -и из п выходов обратной модели объекта соединен с вторым входом (i +1)-го сумматора.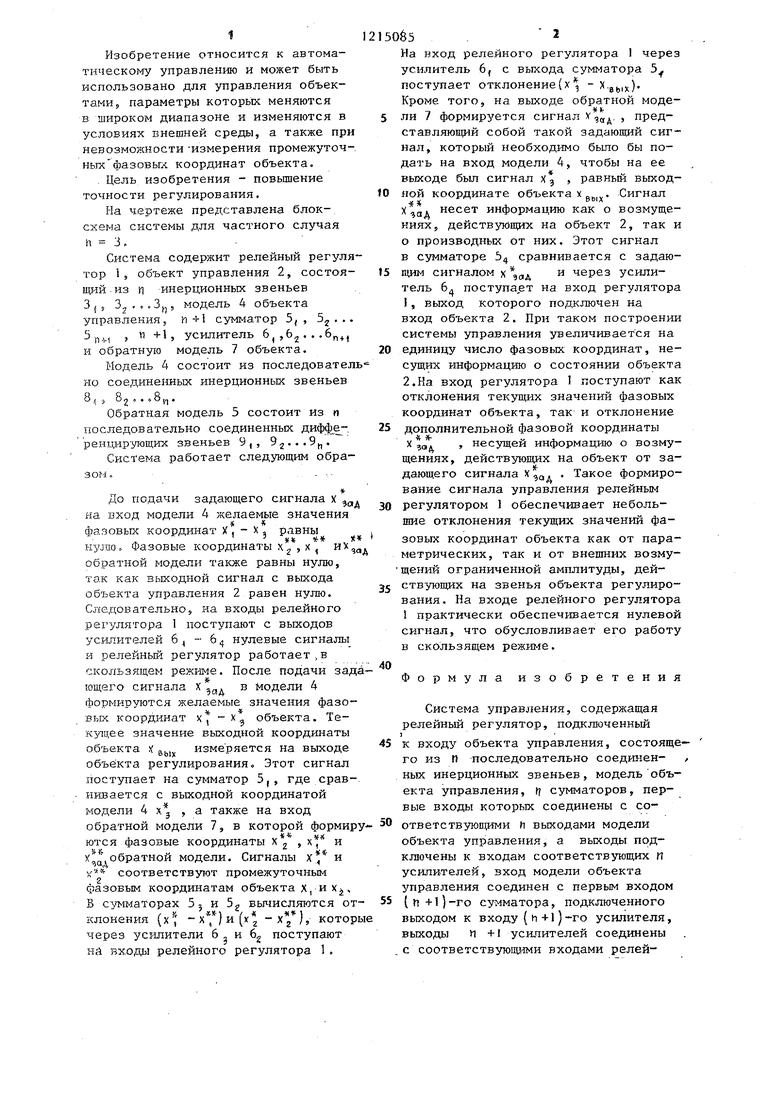
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1979 |
|
SU847272A1 |
| Система управления | 1984 |
|
SU1215084A2 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
Изобретение относится к области систем автоматического управления. Изобретение позволяет повысить точность регулирования при управлении объектами, у которых невозможно измерить промежуточные фазовые координаты. Для этого в систему введена обратная модель объекта, вход которой соединен с выходом объекта управления, каждый i -и из п. выходов обратной модели объекта соединен со вторым входом ( +1)-го сумматора, первый вход которого подключен к, 1-му выходу прямой модели объекта управления. Наличие в системе двух моделей - прямой и обратной - позволяет восстановить все фазовые координаты и обеспечить скользящий режим релейного регулятор 1 ил. i (Л
| Справочное пособие по теории систем автоматического регулирования и управления | |||
| Под ред | |||
| Б.А.Санковс- кого | |||
| Минск: Высшая школа, 1973, с.528 | |||
| Система управления | 1979 |
|
SU847272A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
