(54) УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Устройство наблюдения | 1982 |
|
SU1101790A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Устройство для определения частотных характеристик линейных систем регулирования | 1976 |
|
SU648951A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для идентификации объекта | 1985 |
|
SU1298718A1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
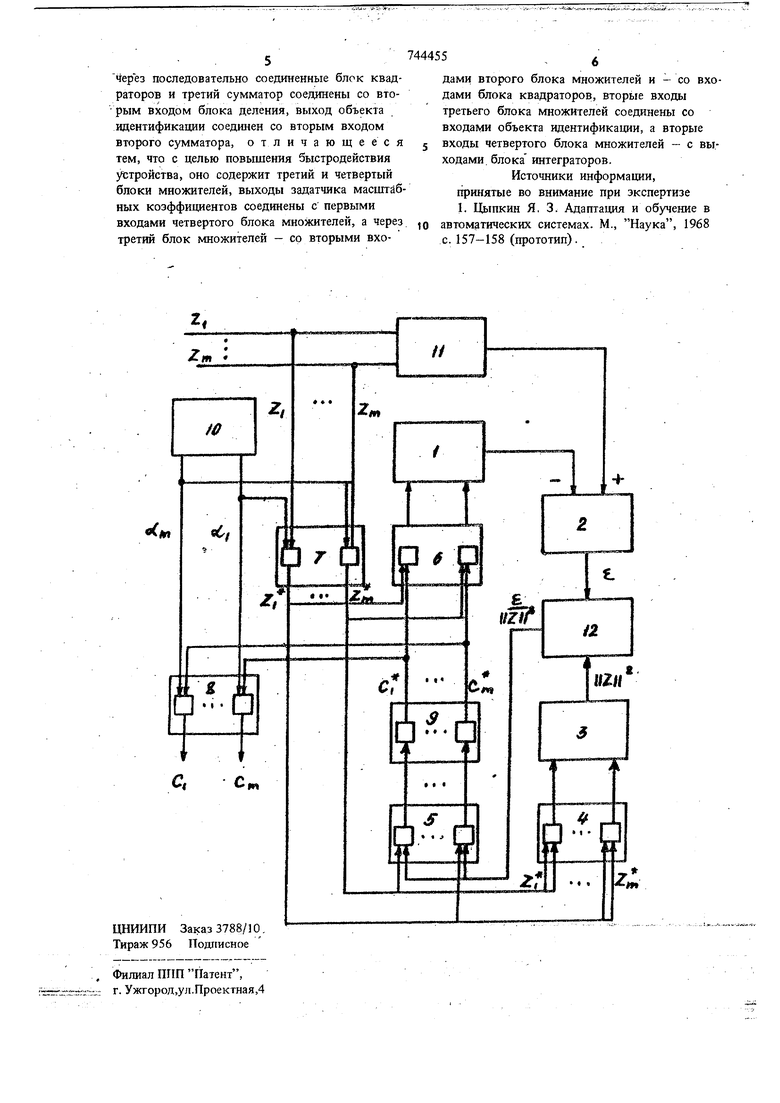
Изобретение относится к управлению нестационарными объектами и может найти широко применение при проектировании самонастраивающихся систем и испытаниях различных объектов. Наиболее близким техническим решением к предлагаемому является устройство для идентификации коэффициентов, последовательно соединенные первый блок множителей, бло интеграторов, второй блок множителей, первы сумматор, второй сумматор и блок деления, выход которого соединен с первыми входами первого блока множителей, вторые входы которого через последовательно соединенные блок квадраторов и третий сумматор соединены со вторым входом блока деления, выход объекта идентификации соединен со вторым входом второго сумматора 1. Недостаток устройства заключается в малом быстродействии. Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что устройство содержит третий и четвертый блоки Iмножителей, выходы задатчика масштабных коэффициентов соединены с первыми входами четвертого блока множителей, а через третий блок множителей - со вторыми входами второго блока множителей и - со входами блока квадраторов, вторые входы третьего блока множителей соединены со входами объекта идентификации, а вторые входь четвертого блока множителей - с выходами блока интеграторов. При этом идентификацию проводят по формулам (i) ,.,J (xCnj-c Cn-iJzen ZCn3 (2) кгспзи ,C,, Здесь дополнительно введено линейное масштабирование входных сигналов, т.е. умножение текущих значений фазовых координат На постоянные коэффициенты ff, g ,,.. ,C(I,. В результате идентификации (2) компоненты вектора параметров с, получаются уменьшейными no сравненгао с их истинными значениями, а именно: С, гг( (Л. S.A/ И поэтому подвергаются аналогичному преобра зователю (3)... Коэффициенты (сА2,,..гп Щ епепяюгся на основе априорной информации о диапазонах, изменения фазовых координат. При этом некоторый коэффициент Л при фазовой координате, модуль которой в некоторый момен времени имеет наибольшее значение на интервале идентификации можно принять равным единице, тогда остальные коэффициенты рассчитываются по формулам i tlmoix. . I i imqx . jm lltnoiX t almax Если известно, что фазовые координаты им одиночные, резко выраженные максимумы, це лесообразнее вычисления проводить по усреднённым значениям O ll iUoiKJ , J maxJ . , где к - зависит от длины выборки и характе ра изменения фазовых координат и в большинстве принимаются (3-10). Линейное масштабирование (1) повышает быстродействие идентификации, так как эквипотенциальные .пинии квадратичного показател Качества J(c) хотя и деформируются от итера ции к итерации, но в среднем более приближа ются к концентрическим окружностям (если рассматривать плоскость двух параметров) чем при отсутствии масштабирования. На чертеже изображена функциональная схе . ма предлагаемого устройства. Устройство содержит первый, второй и третий сумматоры 1, 2 и 3, блок квадратов 4, первый, второй, третий и четвертый блоки множителей 5-8, блок 9 интеграторов. Входные сигналы (фазовые координаты) объекта 11 подключены к первым входам третьего блока 7 умножителей, вторые входы которых соединены .с выходами задатчика 10 масштабных коэффициентов, третьего блока 7 умножителей соединены с первыми входами второго блока 6 умножителей, на вторые вхо ды которых подключены выходы блока 9 ин тегратора. Первый сумматор 1 на выходе второго блока 6 умножителей подключен к вычитаюидему входу второго сумматора 2 вторым входом соединенного с вы.чодом объекта 11, а его выход к первому входу |Ьлока 12 деления вторым входом подключен i ,,--,-i,.,.-.-.. ного к третьему сумматору 3 на выходе блока 4 квадраторов, входы которого соединены с выходами третьего блока 7 умножителей, одновременно подключенных к входам первого блока 5 умножителей, входами соединенных с выходом блока 12 деления, а выходы первого блока 5 множителей подключены ко входам блока 9 интеграторов, выходы которых подключены ко входам второго блока умножителей 6 и четвертого блока 8 множителей, на вторыевходы которых подаются масштабные коэффициенты задаваемые устройством 2, а на выходах четвертого блока 8 множителей получают искомые параметры. Дополнительно введенные третий и четвертый блоки 7 и 8 множителей существенно повышают быстродействие идентификации. Работа устройства заключается в следуюшем. Фазовые координаты объекта 11 во втором блоке 7 множителей умножаются на масштабные коэффициенты, вырабатываемые в задатчике 10 масштабных коэффициентов на основе априорной информации, и поступают на первый и второй сумматоры 5 и 6, и на , блок 4 квадраторов, в котором преобразованные фазовые координаты возводятся в квадрат и в третьем сумматоре 3 суммируются. На полученную сумму квадратов 4 делится разность между выходом объ.екта 11, и модели, полученная во втором сумматоре 2. Результат деления, получаемый в блоке 12 деления, умножается в первом блоке 5 множителей на преобразованные координаты. Результаты умножения поступают на блок 9 интеграторов. С выхода блока 9 интеграторов сигналы поступают на четвертый блок 8 множителей, где умножаются на масштабные коэффициенты, вырабатываемые задатчиком 10 масштабных коэффициентов, в результате, на выходе четвертого сумматора 8 получаются оценки очередного шага вычислений. Введение линейного преобразования фазовых координат в устройстве позволяет получить оптимальные оценки параметров за меньшее число итерации, что позволит сократить время на получение оценок или с большей эффективностью производить управление объектом. Формула изобретения Устройство для идентификации линейного объекта, содержащее задатчик масштабных коэффиодентов; последовательно соединенные первый блок множителей, блок интеграторов, второй блок множителей, первый сумматор, второй сумматор и блок деления, выход которого соединен с первыми входами первого блока множителей, вторые входы которого
