() УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1978 |
|
SU782114A1 |
| Задатчик активного тока дляАСиНХРОННОй МАшиНы | 1978 |
|
SU847479A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод | 1978 |
|
SU797043A1 |
1
Изобретение относится к электротехнике, и может найти применение в электроприводах клетей прокатных станов.
Известно устройство для управления асинхронным двигателем, содержащем задатчики амплитуды и частоты напряжения статора двигателя и преобразователь частоты ПЗ- При этом задат- чик амплитуды напряжения статора связан с задатчиком частоты.
Недостатком этого устройства является невысокая точность управления скоростью асинхронного двигателя в переходных режимах работы.
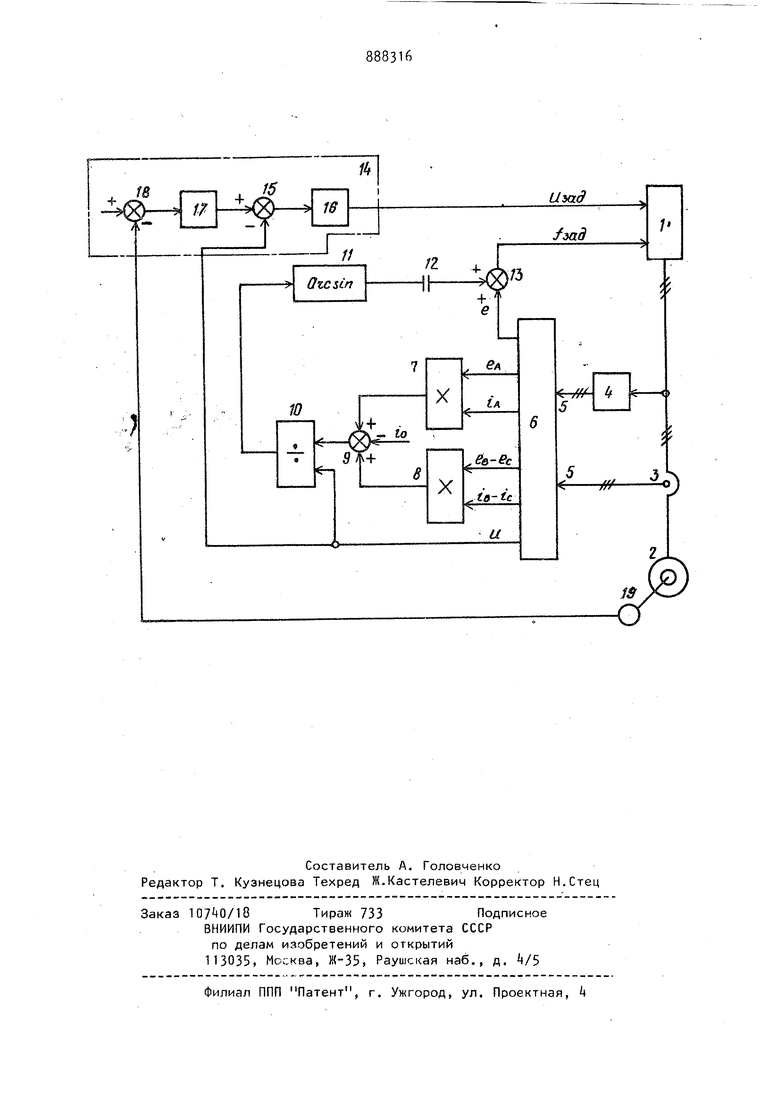
Наиболее близким техническим ре шением к изобретению является устройство управления асинхронным двигателем, содержащее преобразователь частоты, задатчики амплитуды и частоты напрях ения статора, датчики фазных токов и напряжений статора, блоки умножения, сумматоры, задатчик и регулятор потокосцепления ротора, блоки координатных преобразований, блок деления; и датчик частоты вращения ротора двигателя 12 ,
Это устройство управления является многоэлементным сложным электромеханическим устройством, что является его недостатком.
Целью изобретения является упрощение устройства управления асинхронным двигателем.
10
Цель достигается тем, что устройство управления асинхронным двигателем, которое содержит преобразователь частоты, один вход которого
,5 подключен к задатчику амплитуды, а другой - к задатчику частоты напряжения статора, датчики фазных токов и напряжений статора, два блока умножения, сумматор, задатчик потокосцеп2Q ления ротора и блок деления, снабжено блоками нелинейности, выделения переменной составляющей и сигналов обратной связи с выходами амплитуды напряжения .статора, двухфазных токов и ЭДС статора, индуктируемых потокосцеплением ротора, и амплитуды этой ЭДС статора, при этом входы блока сигналов обратной связи подключены к датчикам фазИых токов и напряжений статора, его выходы двухфазных токов и ЗДС статора соответственно попарно подключены к блокам умножения, его выход амплитуды ЭДС статора соединен с одним входом задатчика частоты напряжения статора, а выход амплитуды напряжения статора подключен ко входу делителя блока деления вход делимого которого через сумматор связан с выходами блоков умножения, при этом выход блока деления через последовательно включенные блоки нелинейности и выделения переменной составляющей соединен с другим входом задатчика частоты напряжения статора, а задатчик потокосцепления ротора подключен ко входу сумматора. На чертеже показана структурная схема устройства управления асинхронным двигателем. I Преобразователь 1 частоты подключен к статорным обмоткам двигателя 2 Измерители 3 и 4 фазных токов и напряжений статора соответственно двигателя 2 подключены ко входам 5 блок 6 сигналов обратной связи. Выходы дв фазных сигналов фазных токов i; , ( с) f()статора попарно подключены ко входам блоков 7 и 8 ум ножения, выходы которых подключены к суммирующим входам сумматора 9. К вы читающему входу сумматора 9 подключе выход задатчика потокосцепления рото ра (тока намагничивание i р) , Выход сумматора 9 соединен со входом делимого блока 10 деления, ко входу делителя которого подключен выход амплитуды напряжения статора блока 6 сигналов обратной связи. Выход блока 10 деления через блок 11 нелинейности и через блок 12 выделения перемен ной составляющей подключен к одному входу задатчика 13 ча ;:тоты напряжени статора, к другому входу которого по ключен выход амплитуды ЭДС статора блока 6 сигналов обратной связи. Выход задатчика 13 соединен со входом частоты напряжения статора преобразо теля частоты. Ко входу амплитуды напряжения статора преобразователя 1 частоты подключен выход задатчика 14 амплитуды напряжения статора. Задатчик амплитуды напряжения статора уст ройства управления асинхронным дви6,4 гателем может содержать блок 15 рассогласования напряжений статора, выход которого подключен к задатчику 16. Вычитающий вход блока 15 соединен с выходом амплитуды напряжения статора блока 6. Суммирующий вход блока 15 через регулятор 17 скорости подключен к выходу блока 18 рассогласования скоростей. Вычитающий вход блока 18 соединен с выходом тахогенератора 19, а суммирующий соединен с выходом заДатчика скорости. В рассмотренной блок-схеме устройства управления асинхронным двигателем в общем случае амплитуда напряжения статора определяется независимым сигналом Uga задания на входе преобразователя частоты 1. В частных случаях сигнал Ujj формируется задатчиком 1, выполняющим роль регулятора амплитуды напряжения задания, для которого может служить сигнал с выхода регулятора 17 скорости враще-ния . Сигнал задания частоты статора формируется в соответствии со следующей формулой для частоты tUg, вектора напряжения статора v. ()), где К, К,и К коэффициенты пропорциональности}& - амплитуда ЭДС статора, индуктируемая потокосцеплением ротора; фазные ЭДС Ч , тора; Ч Ч с. фазные токи статора;постоянная величина, зависящая от тока намагничивания 1д (потокосцепления ротора и - амплитуда напряжения статора. Устройство упрааления асинхронным двигателем в варианте с тахогенератором работает следуюи1им образом. Сигнал задания скорости сравнивается с сигналом обратной связи по скорости, поступающим от тахогенератора 19, в блоке 18 рассогласования скоростей. Сигнал рассогласования скорости преобразуется в регуляторе ско5рости 17 в сигнал задания амплитуды напряжения статора, который сравнивается в блоке 15 с сигналом обратной связи по амплитуде напряжения ст тора и, формируемым блоком 6. Сигнал .рассогласования амплитуды напряжения статора с выхода блока 15 через регулятор амплитуды в виде сигнала пает на один из входов преобразователя : 1 частоты,который в соответствии с сигналом изл1формирует требуемую величину фазных напряжений статора двигателя 2. В процессе работы привода непрерывно измеряются фазные токи и напряжения статора соответственно измерителями 3, Результата измерений напряжени и токов преобразуются в блоке 6 в си нал амплитуды напряжения статора U, в фазные ЭДС статора д , , с. дуктируемые потокосцеплением ротора (j и в амплитуду фазных ЭДС статора. Сигналы фазных ЭДС и токов статор преобразуются в двухфазные сигналы, затем перемножаются попарно с помощью блоков 7 и 8, результаты суммируются в сумматоре 9, а сумма уменьшается на величину, пропорциональную току 1Q (потокосцеплению ротора Выходной сигнал сумматора 9 уменьшаю путем деления его на сигнал амплитуд напряжения статора U в блоке 10 деления. Выходной сигнал блока 10 деления преобразуют с помощью блока 11 с нелинейной характеристикой типа аres in, из результата исключают постоянную составляющую с помощью блока 12 выделения переменной составляющей (конденсатора) и далее суммируют полученный, сигнал с сигналом е амплитуды ЭДС статора в задатчике 13 час.тоты напряжения статора. Выходной си нал этого сумматора является сигнало задания fag. частоты напряжения статора. Сигнал несет информацию об основной сЬставляющей частоты (фазы) напряжения статора, а сигнал после разделительного конденсатора 1. является корректирующим сигналом фазы напряжения статора. Из описания работы привода следуе что формирование основного и корректирующего сигналов фазы напряжения статора ведется по результатам измерения фазных напряжений и токов статора асинхронного двигателя без использования сигнала тахогенератора. Это обстоятельство упрощает техническую реализацию устройства управ166пения асинхронным двигателем согласно изобретению и расширяет область применения электропривода с асинхронным короткозамкнутым двигателем. Формула изобретения Устройство для управления асинхронным двигателем, содержащее преобразователь частоты, один вход которого подключен к задатчику амплитуды, а другой - к задатчику частоты напряжения статора, датчики фазных токов и напряжений статора, два блока умножения, сумматор,, задатчик потокосцепления ротора и блок деления, о тличающееся тем, что, с целью упрощения, оно снабжено блоками нелинейности, выделения переменной составляющей и сигналов обратной связи с выходами амплитуды напряжения статора, двухфазных токов и ЭДС статора, индуктируемых потокосцеплением ротора, и амплитуды этой ЭДС статора, при этом входы блока сигналов обратной связи подключены к датчикам фазных токов и напряжений статора, а его выходы двухфазных токов и ЭДС статора соответственно попарно подключены к блокам умножения, его выход амплитуды ЭДС статора соединен с одним вхрДОМ задатчика частоты напряжения статора, а его выход амплитуды напряжения статора подключен ко входу делителя блока деления, вход делимого которого через сумматор связан с выходами блоков умножения, при этом выход блока деления через последовательно .включенные блокйнёлинёйностй и выделения переменной составляющей соединен с другим входом задатчика частоты напряжения статора, а задатчик потокосцепления ротора подключен ко входу сумматора. Источники информации, принятые во внимание при экспертизе. 1.Сандлер А. С. Сарбатов Р.С. Автоматическое частотное управление асинхронными двигателями. М., Энергия, 197, гл. П. 2,Шрейнер Р. Г. Федоренко А. Л. Система автоматического управления асинхронным электроприводом с автономным инвертором напряжения. Сб. статей Динамика систем управления, (ишинев, Штиница, 1975, ч. 1.
