1
Изобретение относится к обработке металлов давлением, в частности к автоматам для навивки и разрезания на части многогранных проволочных спиралей, используемых в качестве насадки массообменных колонн.
Известен автомат для навивки многогранных проволочных спиралей, содержаЕций смонтированные на станине приводной механизм навивки с многогранной оправкой в виде трёхгранной иглы и с постоянным числом оборотов электродвигатель механизма резки, состоящего из неподвижного диска с отверстием и сегментного ножа, смонтированного на валу электродвигателя, и средство для натяжения проволоки при навивке ill.
Недостаток известного автомата в том, что его производительность мала из-за неравномерности процесса навивки при ручном регулировании натяжения проволоки.
Наиболее близким к предлагаемому по технической сущности является автомат для навивки многогранных проволочных спиралей, содержащий смонтированные на станине приводной механизм навивки с многогранной оправкой, подторможенный бухтодержатель
с проволокой, механизм резки с подвижным и неподвижным ножами и накопитель готовых изделий Г2 .
Недостаток известного автомата в том, что его производительность мала.
Цель изобретения - повышение производительности автомата.
Указанная цель достигается тем,
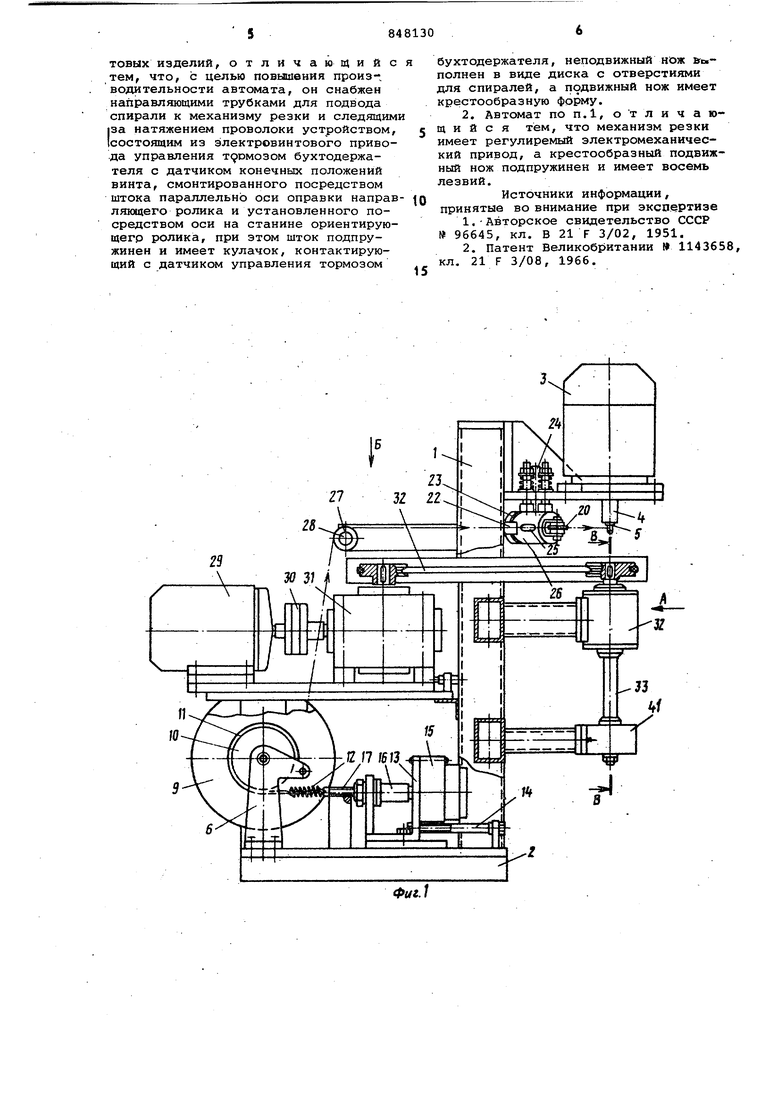
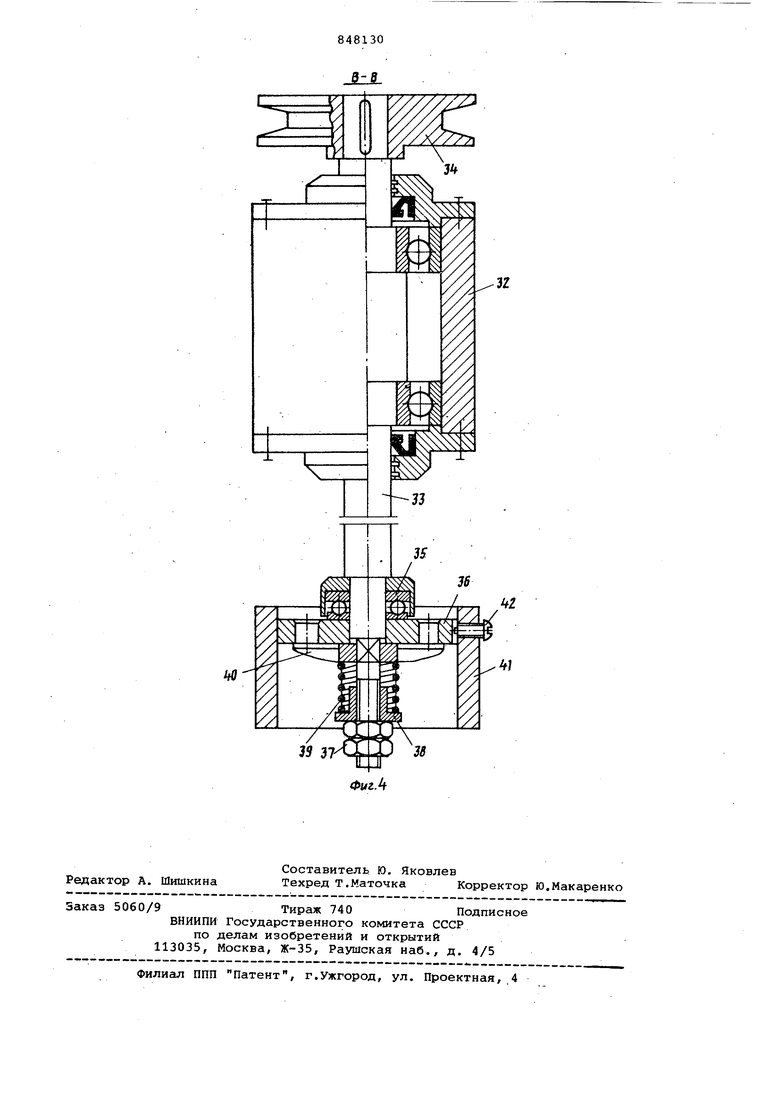
10 что автомат для навивки многогранных проволочных спиралей, содержащий смонтированные на станине приводной механизм навивки с многогранной оправкой, подторможенный бухтодер15жатель с проволокой, механизм резки с подвижным и неподвижным ножами и накопитель готовых изделий, снабжен направляющими трубками -для подвода спирали к механизму резки и следя20щим за натяжением проволоки устройством, состоящим из элейтровинтового привода управления тормозом бухтодержателя с датчиком конечнЕлх положений винта, смонтированного посред25ством штока параллельно оси на станине ориентирующего ролика, при этом шток подпружинен и имеет кулачок, контактирующий с датчиком управления тормозом бухтодержателя, неподвиж30ный нож выполнен в виде диска с отверстиями для спиралей, а подвижный нож имеет крестообразную форму. Кроме того, механизм резки имеет регулируемый электромеханический при вод, а крестообразный подвижный нож подпружинен и имеет восемь лезвий. На фиг. 1 показан предлагаемый автомат, общий вид; на фиг. 2 - вид А на фиг.1, на фиг. 3 - вид Б на фиг.1; на фиг., 4 - разрез В-В на фиг.1. На стойке 1 станины 2 установлен два фланцевых электродвигателя 3, на валах которых посажены оправки 4 с закрепленными в них многогранными иглами 5. На кронштейнах б в конусных шайбах 7 и 8 закреплен бухтодержатель 9 с .проволокой. Шайба 7 выполнена с тормозным шкивом 10, охваченным лентой 11 с пружиной 12. На ползуне 13 с регулировочным винтом 14 установлен элетродвигатель 15 следящего устройства, на валу которого посажена гайка 16 с натяжным винтом 17, соединенным с пружиной 12. На винте Г7 закреплен кулачок 18, .воздействующий на датчики 19 Направляющий ролик 20 следящего устройства смонтирован на подпружиненном штоке 21,установленном в ста кане 22 с гайкой 23 . Для возможности р гулировки шага навивки спирали стакан 22 закреплен к стойке 1 подпружиненно, а положение ролика 20 относительно иглы 5 по вертикали изменяется винтом 24. Кулачок 2,5, закрепленный на штоке 21, -проходит через прорезь в стакане 22, предохраняет ШТОК; от проворачивания и во действует на датчик 2б,Направляющий рюлик 27 имеет возможность перемеща ся по ширине бухтодержателя 9 вдоль оси 28. Механизм .резки спирали на мерные длины состоит из электродвигателя 29 с регулируемым числом обо ротов, соединенного муфтой 30 с червячным редуктором 31. Редуктор соединен клиноременной передачей,с закрепленным на стойке 1 в стакан 32 на подшипниках качения валом 33, на верхнем конце которого закреплен шкив 34. На нижнем конце вала свободно посажен опирающийся на упорный подшипник 35 режущий диск 36 с крнцентрично расположенными отверстиями для прохождения и резки навиптой спирали. Размеры и число (8-lb). отверстий на диске 36 зависят от диаметра спирали. К диску 36 гайками 37 через втулку 38 и пружин 39 прижимается посаженный на квадратную часть вала 33 восьмилезвийны крестообразный нож 40. Диск 36 свободно входит в закрепленный к стойке 1 стакан 41 и удерживается от пр ворачивания винтом 42. К стакану 32 прикреплены две направляющие трубки 43 для подвода спи.рали к механизку резки. Автомат работает следующим образом. Проволока с бухтодержателя 9 через ролики 27 и 20 поступает на трехгранную иглу 5. Навитая спираль про ходит через направляющую трубку 43 и одно из отверстий в диске 36. На выходе из отверстия она разрезается на мерные длины вращакяцимся восьмилезвийным крестообразным ножом 40. Длина отрезаемой спирали определяется частотой вращения ножа 40. отрезанные части спира-ли падают в короб, установленный под стаканом 41. При запуске автомата винт 17 тормоза следящего устройства вьвдвинут вправо. Необходимое натяжение проволоки, обеспечивающее равномерный шаг навивки и угол смещения витков, устанавливается перемещением ползуна 13 вправо с помощью винта 14 и натяжением пружины штока 21 гайкой 23. При этизм датчик 26 устанавливается в такое пол&жение, что;на него не воздействует кулачок 25. Шаг навивки спирали устанавливается перемещением по вертикали ролика 20 относительно иглы 5 винтом 24. По мере сматывания проволоки с бухтодержателя уменьшается диаметр бунта, и поэтому при первоначально установленном т.ормозном моменте увеличивается натяжение проволоки, вследствие чего шток 21 с роликом 20 сжимает пружину и вдвигается в стакан 22. Кулачок 25 воздействует на датчик 26, который дает импульс на включение электродвигателя 15. При этом винт 17 перемещается влево и ослабляет натяжение пружины 12, вследствие чего уменьшается тормозной момент и натяжение проволоки уменьшается до заданного. .Шток 21 с роликом 20 под действием пружины выдвигается из стакана 22 до тех пор, пока кулачок 25 не перестанет воздействовать на датчик 26, который при этом дает импульс на остановку электродвигателя 15. Конечные положения винта 17 определяются датчиками 19, связанными с электродвигателем 15. При износе режущих кромок отверстий в диске 26 или ножей 40, диск поворачивают до совмещения нового отверстия с осью направляющей трубки 43, а направление вращения ножа изменяется на обратное. Формула изобретения 1. Автомат для навивки многогранных проволочных спиралей, содержащий смонтированные на станине приводной механизм навивки с многогранной оправкой, подторможенный бухтодержатель с проволокой, механизм резки с подвижным и неподвижным ножами и .накопитель готовых изделий, отличающийс тем, что, с целью повышения производительности автомата, он снабжен направляющими трубками для подвода спирали к механизму резки и следящим |за натяжением проволоки устройством, состоящим из электровинтового привода управления тромозом бухтодержателя с датчиком конечных положений винта, смонтированного посредством штока параллельно оси оправки направ ляницего ролика и установленного посредством оси на станине ориентирующегр ролика, при этом шток подпружинен и имеет кулачок, контактирующий с датчиком управления тормозом
бухтодержателя, неподвижный нож втыполнен в виде диска с отверстиями для спиралей, а подвижный нож имеет крестообразную форму.
2. Автомат по п.1, о т л и ч а ющ и и с я тем, что механизм резки имеет регулиремый электромеханический привод, а крестообразный подвижный нож подпружинен и имеет восемь лезвий.
Источники информации, принятые во внимание при экспертизе
1,-Авторское свидетельство СССР 96645, кл. В 21 F 3/02, 1951.
2. Патент Великобритании О 114365 кл, 21 F 3/08, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Автомат для навивки проволочныхСпиРАлЕй и РАзРЕзАНия иХ HA чАСТи | 1979 |
|
SU846007A1 |
| Автомат для навивки пружин | 1987 |
|
SU1576220A1 |
| Устройство для навивки спирали | 1980 |
|
SU925492A1 |
| Автомат для навивки пружин | 1990 |
|
SU1818168A1 |
| Полуавтомат для изготовления многотраверсных цилиндрических сеток типа "беличьего колеса | 1973 |
|
SU720566A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ НЕТКАНОГО МАТЕРИАЛА МР НА ПРОВОЛОЧНОЙ ОСНОВЕ И СТАНОК ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2001 |
|
RU2195381C2 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |


6 19 )8П19 IS 13 15 / LH Виде
Фиг. 3 lit
1Л
32
