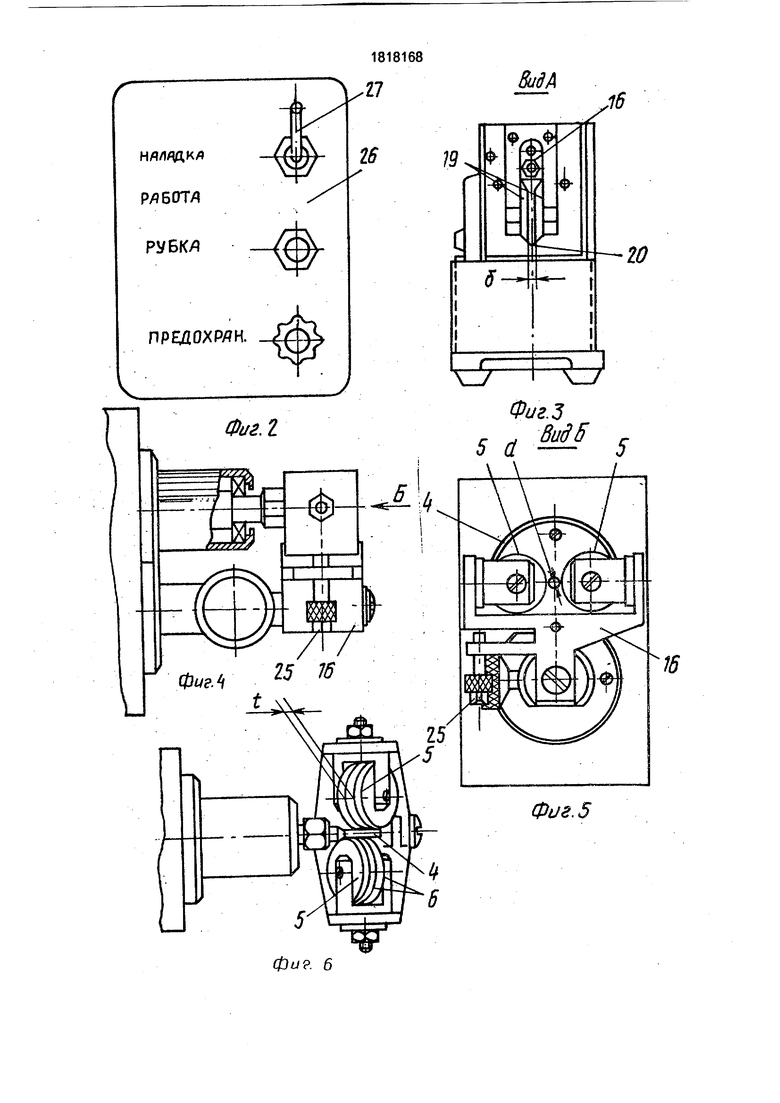
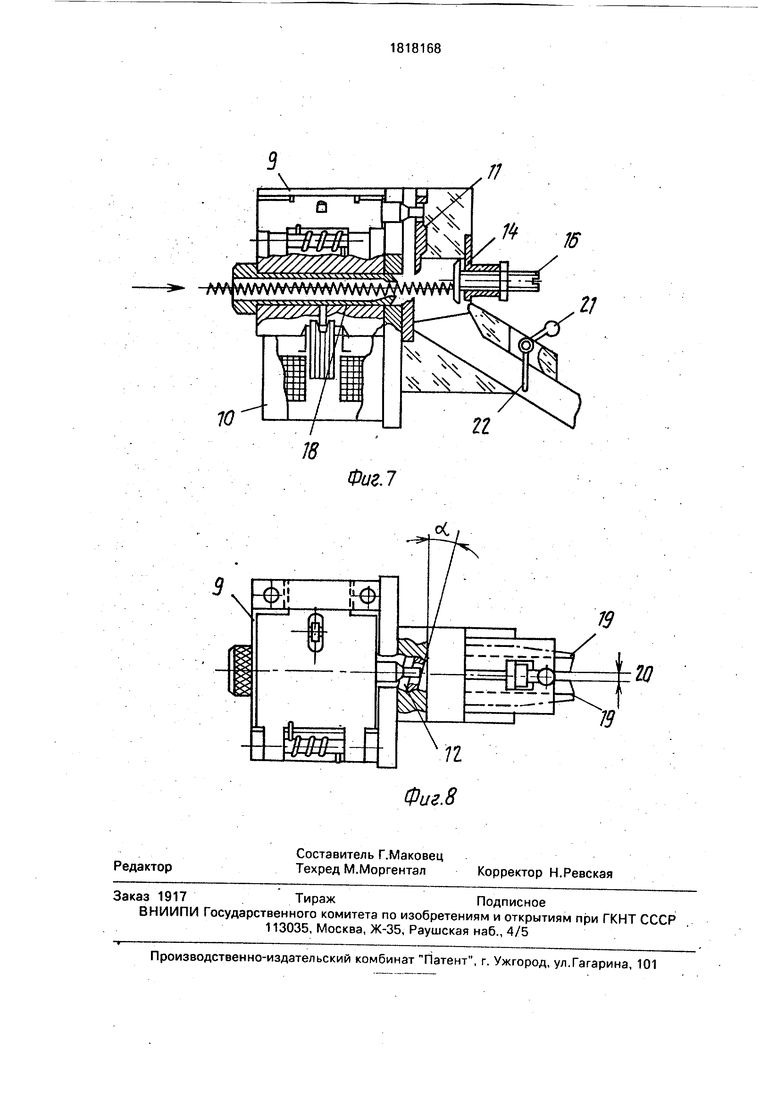
оппозитно относительно оси оправки А двух обкатных роликов 5 с выполненными на их поверхности канавками 6, шаг которых t равен шагу навиваемой спирали, механизм подачи проволоки 7 с регулируемым узлом натяжения проволоки 8, установленным между бухтодержателем 2 и механизмом формообразования спирали 3, механизм резки пружины-9, включающий кинематически связанный с электромагнитом 10 подвижной нож п, неподвижный нож 12 и направляющий насадок 13, а также меха- низм блокировки автоматического останова 14, блок программного управления 15 и регулируемый упор 16.
Автомат снабжен шарнирно установленным в корпусе 1 коромыслом 17, на котором закреплены обкатные ролики 5, закрепленным на механизме резки пружины 9 поворотным относительно своей оси направляющим винтовым каналом 18 с шагом, равным шагу канавок 6 обкатных роликов 5, закрепленными на направляющем насадке 13 двумя электродами 19, установленными с зазором 20, не превышающим диаметр оправки 4, и соединенными с блоком программного управления 15, а также установленной на направляющем насадке 13 свободно на оси и уравновешенной противовесом 21 заслонкой 22. Подвижный 11 и неподвижный 12 ножи установлены под углом к оси направляющего винтового канала 18, равным углу наклона витков направляющего винтового канала 18. Блок программного управления 15 снабжен емкостью 23, подключаемой к электромагниту 10.
В качестве привода для вращения оправки 4 используется электродвигатель 24, с выходным валом которого соединена оправка 4. Для фиксации коромысла 17с обкатными роликами 5 автомат снабжен винтом 25. На боковой панели корпуса 1 выполнен пуль наладки 26(фиг.2), содержащий переключатель 27 режимов работы автомата. Для включения и выключения автомата выполнен пульт управления с кнопками включения сети, пуска автомата в работу и останова его. Автомат снабжен контейнером 28 для сбора изготовленных пружин.
Угол р наклона витков спирали с шагом t, наружным диаметром DH и внутренним диаметром DB равен
агаЗя(Рн-Вь)
Угол наклона витков направляющего винтового канала 18, имеющего шаг, равный шагу канавок 6 обкатных роликов 5,
также равен углу р наклона витков спирали. Режущие кромки подвижного 11 и неподвижного 12 ножей установлены в плоскости, расположенной под углом ак оси направляющего винтового канала 18, равным углу р наклона витков направляющего винтового канала и наклона витков спирали.
Автомат работает следующим образом. В процессе подготовки к работе установить переключатель на пульте наладки 26 в положение Наладка. Проволока из бухто- держателя 2 закрепляется через механизм подачи проволоки 7 и регулируемый узел натяжения проволоки 8 между обкатными
5 роликами 5. Вращая вручную вал электродвигателя 24, навиваются несколько витков спирали. Обкатные ролики 5 подводятся к оправке так, чтобы проволока вошла в канавки б обкатных роликов 5, после чего по0 следние закрепляются винтом 25.. Посредством вращения вручную вала электродвигателя 24 навиваются еще несколько витков спирали. Нажимается кнопка Сеть, при этом загорается лампочка Сеть и за5 Тем нажимается кнопка Рубка, при этом срабатывает электромагнит 10 узла отрезки пружин. Переключатель на пульте наладки устанавливается в положение Работа. : После подготовки автомата к работе
0 нажимается кнопка Пуск на пульте управления, включается электродвигатель 24, вращающий оправку 4, сформированная пружина сползает с оправки 4 и перемещается к направляющему винтовому каналу 18.
5 Шаг намотки обеспечивается шагом кана- вок 6 на обкатных роликах 5. По направляющему винтовому каналу 18 пружина доходит до регулируемого упора 16. При электрическом контакте пружины с упором 16 подает0
0
ся команда на включение электромагнита
10, который перемещает нож 11, отрезающий пружину. Регулировкой упора 16 достигается требуемая длина пружины. Отрезанная пружина падает на направляю- 5 щий насадок 12, замыкает электроды 18 и, скользя по электродам 19, поступает в контейнер 28. При нормальной работе автомата происходит падение пружины на электроды 18 с определенным интервалом (2 с). Если
не происходит падение пружины на электроды 18 с указанным интервалом, то через установленное время Ј-5 с) блоком программного управления 15 выделяется команда на выключение электродвигателя 24. Тем са- 5 мым обеспечивается автоматическая остановка работы автомата в случае израсходования проволоки из бухтодержа-- теля 2, в случае задержки подачи проволоки в механизме подачи проволоки 7 и возникновения большего натяжения, чем создаваемое регулируемым узлом натяжения 8, а также в случае образования петли из спирали между оправкой и направляющим винтовым каналом 18 из-за торможения в винтовом канале 18 или из-за плохой рубки спирали ножами 11 и 12, а также в других случаях отклонения работы автомата от нормального режима.
Предложенное устройство позволяет повысить надежность работы автомата за счет снабжения его поворотным относительно своей оси направляющим винтовым каналом 18 с шагом, равным шагу канавок обкатных роликов. Путем поворота направ- ляющего винтового канала 18 выбирается такое его положение; когда нижняя часть витка спирали располагается над кромкой неподвижного ножа 12. Тем самым обеспечивается надежная отрезка пружины. Для этой же цели блок программного управления снабжен емкостью, подключенной к электромагниту 10. Этим обеспечивается импульсный режим питания электромагнита 10 и более быстрое перемещение по- движного ножа 11.
Увеличение ресурса работы автомата достигается за счет снабжения его закрепленными на направляющем насадке 13 двумя электродами 19, установленными с зазором 20 и соединенными с блоком про- граммного управления 15, а также установленной на направляющем насадке 13 свободно на оси и уравновешенной противовесом 21 заслонкой 22. Тем самым конт- ролируется нормальное протекание процесса работы автомата по равномерному выходу пружины с направляющего насадка 13. Заслонка 22 исключает пролет пружины после отрезки над электродами 19. В случае задержки выхода пружин подается команда на останов автомата, вследствие этого исключается износ оправки, роликов и других деталей автомата.
Установка подвижного 11 и неподвижного 12 ножей под углом а к оси направляющего винтового канала 18, равным углу уэнаклона витков направляющего винтового канала 18, обеспечивает отрезку пружины в сечении, близком к нормальному по отношению к ее оси, тем самым уменьшается
усилие, необходимое для резки пружины, и износ ножей 11 и 12, а также обеспечивается непрерывная подача вращающейся спирали между ножами 11 и 12 и сводится к минимуму торможения или задержки подачи спирали в направляющем винтовом канале 18 при нормальной резке пружин. Этим достигается повышение ресурса работы автомата.
Формула изобретения
1. Автомат для навивки пружин, содержащий корпус, бухто держатель, механизм формообразования спирали, выполненный в виде Сменной приводной оправки и расположенных оппозитно относительно оси оправки двух обкатных роликов с выполненными на их поверхности канавками, шаг которых равен шагу навиваемой спирали, механизм подачи проволоки с регулируемым узлом натяжения проволоки, установленным между бухтодержателем и механизмом формообразования спирали, механизм резки пружины, включающий кинематически связанный с электромагнитом, подвижный нож, неподвижный нож и направляющий насадок, а также механизм блокировки автоматического останова, блок программного управления и регулируемый упор, отличающийся тем, что, с целью повышения надежности и увеличения ресурса его работы, он снабжен шарнирно установленным в корпусе коромыслом, на котором закреплены обкатные ролики, закрепленным на механизме резки пружины поворотным относительно своей оси направляющим винтовым каналом с шагом витков, равным шагу канавок обкатных роликов, закрепленными на направляющем насадке двумя электродами, установленными с зазором, не превышающим диаметр оправки, и соединенными с блоком программного управления, а также установленной на направляющем насадке свободно на оси и уравновешенной противовесом заслонкой, причем подвижный и неподвижный ножи установлены под углом к оси направляющего винтового канала, равным углу наклона его витков.
2. Автомат по п.1,отличающийся тем, что блок программного управления снабжен емкостью, подключаемой к электромагниту.
TIT
24 8
} г-k
ЗЕ
Пето/1 ППУСК
Ф-ПсЕТь
00
«А
со
А
о
00
€.
15
28
няледкд РЛБОТЛ
РУБКЛ
8идА
/
16
-20
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1987 |
|
SU1576220A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Автомат для навивки многогранныхпРОВОлОчНыХ СпиРАлЕй | 1979 |
|
SU848130A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Автомат для непрерывного изготовления колец из проволоки | 1988 |
|
SU1593761A1 |
| Автомат для изготовления пружинных шайб | 1983 |
|
SU1161217A1 |
| Устройство для навивки цилиндрических пружин с переменным шагом | 1983 |
|
SU1650310A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН ПРЕИМУЩЕСТВЕННО С МАЛЫМ ИНДЕКСОМ | 1990 |
|
RU2010652C1 |
| Автомат для изготовления плоских спиральных пружин | 1980 |
|
SU880585A1 |
| Устройство для изготовления винтовых пружин | 1985 |
|
SU1268260A1 |
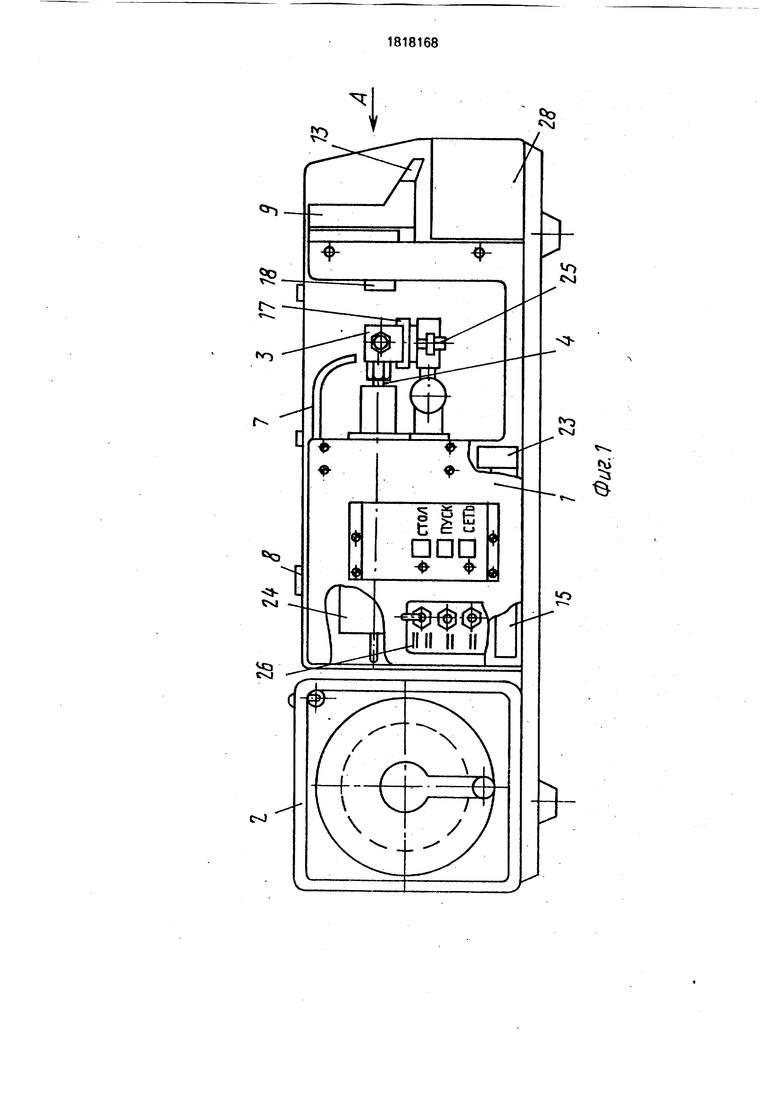
Использование: изобретение относится к обработке металлов давлением, в частности к оборудованию для производства цилиндрических пружин, и позволяет повысить надежность и увеличить ресурс работы. Сущность: автомат для навивки пружин содержит корпус, бухтодержатель, механизм формообразования спирали, выполненный в виде сменной оправки и расположенных оппозитно относительно оси оправки двух обкатных роликов с выполненными на их поверхности канавками, шаг которых равен шагу навиваемой спирали, механизм подачи проволоки с регулируемым узлом натяжения проволоки, установ- ленным между бухтодержателем и Изобретение относится к обработке металлов давлением, в частности к оборудованию для приготовления цилиндрических пружин. Целью изобретения является повышение надежности и увеличение ресурса работы. На фиг.1 изображен автомат для навивки пружин, общий вид; на фиг,2 - пульт наладки; на фиг.З - вид по стрелке А на фиг. 1: на фиг.4 - механизм формообразовамеханизмом формообразования спирали, механизм резки пружины, включающий кинематически связанный с электромагнитом подвижный нож, неподвижный ножи и направляющий насадок, а также механизм блокировки автоматического останова, блок программного управления и регулируемый упор. Автомат имеет шарнирно установленное в корпусе коромысло, на котором закреплены обкатные ролики, закрепленный на механизме резки пружины поворотный относительно своей оси направляющий винтовой канал с шагом, равным шагу канавок обкатных роликов, закрепленные на направляющем насадке два электрода, установленные с зазором, не превышающим диаметр оправки, и соединенные с блоком программного управления, а также установленную на направляющем насадке свободно на оси и уравновешенную противовесом заслонку, причем подвижный и неподвижный ножи установлены под углом к оси направляющего винтового канала, равным углу наклона витков направляющего винтового канала, а блок программного управления снабжен емкостью, подключаемой к электромагниту. 1 з.п. ф-лы, 8 ил. ния спирали, вид сбоку; на фиг.5 - вид по стрелке Б на фиг.4; на фиг.б - механизм формообразования спирали, вид сверху; на фиг.7 - механизм резки пружины и направляющего насадка, поперечный разрез; на i фиг. 8- механизм резки пружины и направляющего насадка, вид сверху. Автомат для навивки пружин содержит корпус 1, бухтодержатель 2, механизм формообразования спирали 3, выполненный в виде сменной оправки 4 и расположенных СЛ С со 00 Qs 00
ПРЕДОХРДН.
Фиг. I
фи. 6
Фиг.З
с н Вид Б о и --
5
16
70
16
Фиг.7
19
| Способ получения офлюсованного агломерата | 1988 |
|
SU1578220A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
