(54). РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1981 |
|
SU993208A1 |
| Регулятор с переменной структурой | 1979 |
|
SU954929A2 |
| Регулятор с переменной структурой | 1978 |
|
SU792217A1 |
| Регулятор с переменной структурой | 1978 |
|
SU783753A1 |
| Система регулирования | 1981 |
|
SU954933A1 |
| Устройство для изменения структуры системы | 1975 |
|
SU551609A1 |
| Регулятор с переменной структурой | 1983 |
|
SU1142812A1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
. t
Изобретение относится к устройствам автоматического управления и может найти применение в системах автоматического управления нестационарными объектами при наличии больших внешних возмущений.
Известны регуляторы с переменной структурой, включа101дие в себя каналы формирования непрерывной и дискретной компонент управления р. и 2j .
Наиболее близким к предлагаемому по технической сущности является регулятор с переменной структурой, содержащий последовательно соединенные формирователь линии переключения, блок сравнения знаков, переключатель и сумматор, второй вход которого соединен со вторыг/ входом блока сравнения знаков и с выходом формирователя сигнала управления, входы которого подключены к соответствующим входам формирователя линии переключения, и последовательно соединены источник опорного сигнала и пороговое устройство, выход которого соединен со вторым входом переключателя f3J .
Недостатком известного регулятора .является сложность вычисления сигнала модуля вектора фазовых координат, требующая либо установки цифрового
вычислителя, либо специального устройства, обеспечивающего этот процесс, что затруднительно для ряда объектов с точки зрения габаритно-весовых характеристик . Сложное формирование режимов управления также снижает надежность систем автоматического управления, так как вектор фазовых координат определяется
10
X -{х , , где х - рассогласование системы;
х,ха его модуль
)Х| ,
Таким образом, формирование /х/
15 ТЕ ебует возведения в квадрат текущих значений сигналов х , x,j и извлечения квадратного корня получения значения /х/.
Цель изобретения - упрощение и
20 повышение надежности регулятора.
Поставленная цель достигается тем, «то в регуляторе выход формироватепя сигнала управления соединен со вторым входом порогового устройства.
25
Таким образом, формируется регулятор комбинированной структуры, содержащий канал переменной структуры и функциональный канал. Такое формирование позволяет переходить с одного
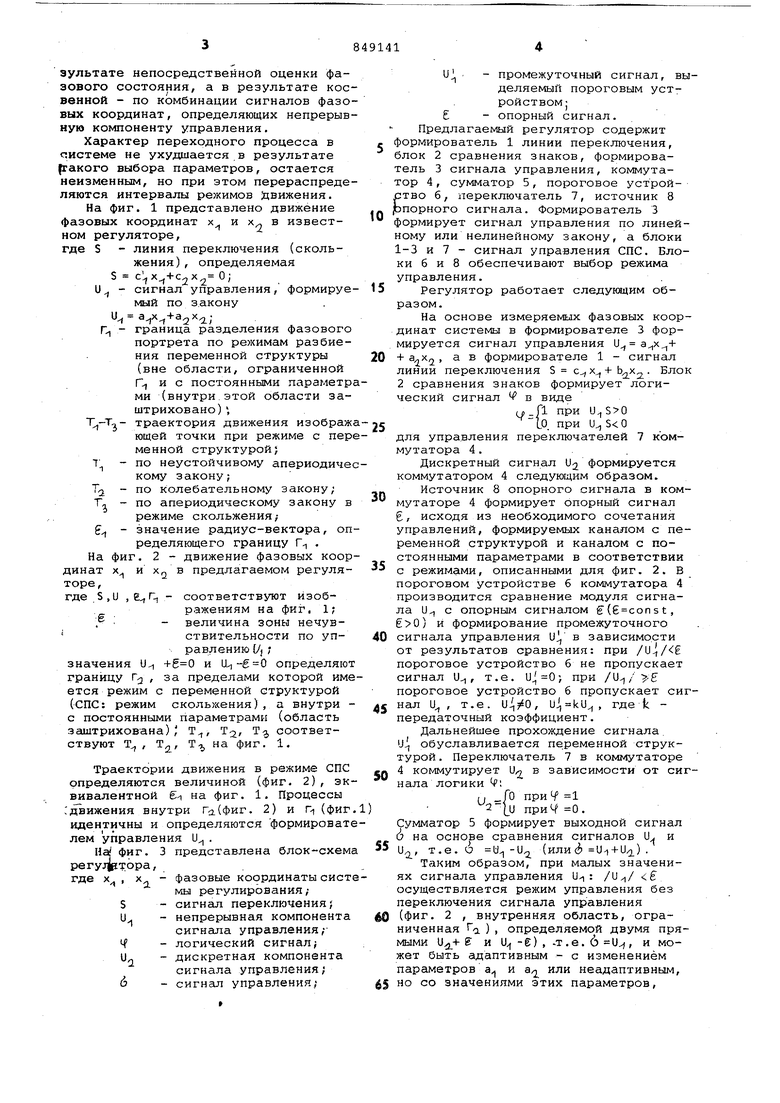
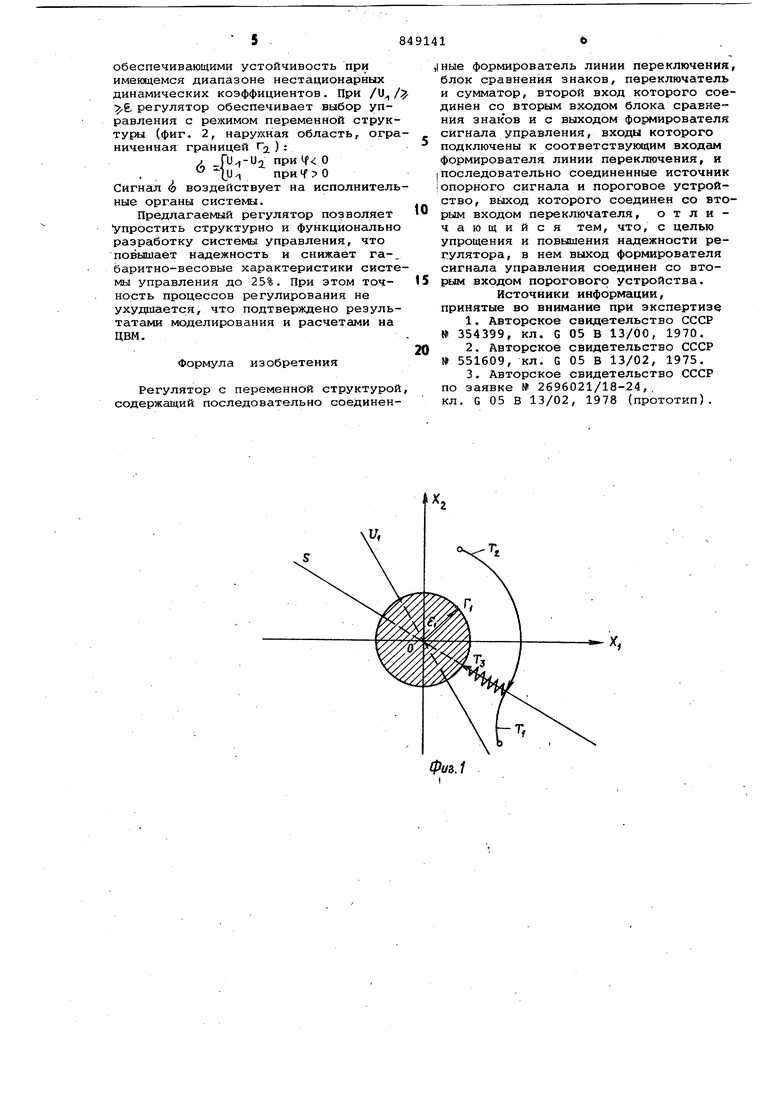
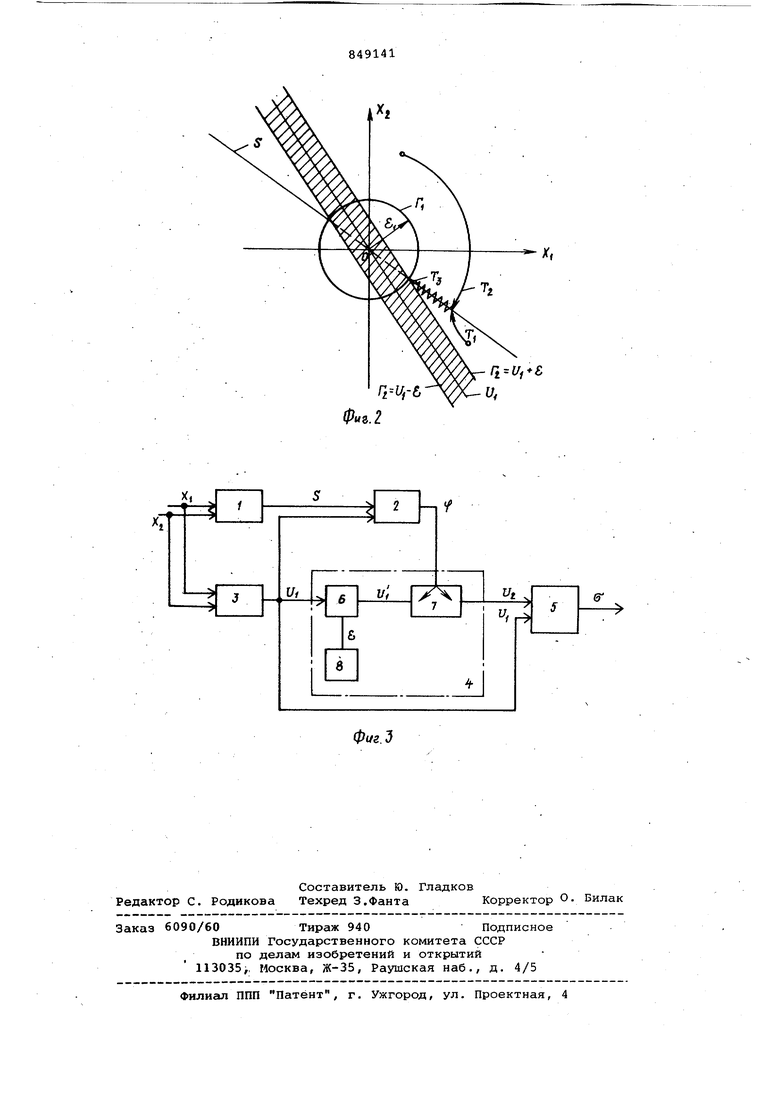
30 режима управления на другой не в реэультате непосредственной оценки фазового состояния, а в результате кос венной - по комбинации сигналов фазо вых координат, определяющих непрерыв ную компоненту управления, Характер переходного процесса в системе не ухудшается в результате ргакого выбора параметров, остается неизменным, но при этом перераспреде ляются интервалы режимов вижения. На фиг. 1 представлено движение фазовых координат х и х в известном регуляторе, где S - линия переключения (скольжения) , определяемая S и - сигнал управления, формиру мый по закону .,; Г,, - граница разделения фазовог портрета по режимам разбие ния переменной структуры (вне области, ограниченной Г, и с постоянными парамет ми (внутри этой области за штриховано) траектория движения изобра ющей точки при режиме с пе менной структурой; Г - по неустойчивому апериодич кому закону; Tj - по колебательному закону; Тл - по апериодическому закону режиме скольжения; f - значение радиус-вектора, о ределяющего границу Г . На фиг, 2 - движение фазовых коо динат х и х в предлагаемом регуля торе, где S,U , , - соответствуют изображениям на фиг, 1; . - величина зоны нечувствительности по управлению Ц; значения U и lL, определяю границу г-з , за пределами которой им ется режим с переменной структурой (СПС: режим скольжения), а внутри с постоянными параметрами (область заштрихована); Т, Т-, Т соответствуют Т , Т, Т,, на фиг. 1, Траектории движения в режиме СПС определяются величиной (фиг, 2), эк вивалентной g на фиг, 1, Процессы Сдвижения внутри Га(фиг, 2) и Г (фиг идентичны и определяются формироват лем управления U. Н фиг, 3 представлена блок-схем peryj|pTOpa, где X , X - фазовые координаты сис мы регулирования; S - сигнал переключения; и - непрерывная компонента сигнала управления, - логический сигнал; и,, - дискретная компонента сигнала управления; 6 - сигнал управления; и - промежуточный сигнал, выделяемый пороговым УСТРОЙСТВОМ) - опорный сигнал. Предлагаемый регулятор содержит формирователь 1 линии переключения, блок 2 сравнения знаков, формирователь 3 сигнала управления, коммутатор 4, сумматор 5, пороговое устройтво 6, переключатель 7, источник 8 опорного сигнала. Формирователь 3 формирует сигнал управления по линейному или нелинейному закону, а блоки 1-3 и 7 - сигнал управления СПС, Блоки б и 8 обеспечивают выбор режима управления. Регулятор работает следующим образом. На основе измеряемых фазовых координат системы в формирователе 3 формируется сигнал управления + , а в формирователе 1 - сигнал линии переключения S с х + ,, . Блок 2 сравнения знаков формирует логический сигнал в виде (j,ri при LO. при и S О для управления переключателей 7 коммутатора 4 , Дискретный сигнал U формируется коммутатором 4 следующим образом, Источник 8 опорного сигнала в коммутаторе 4 формирует опорный сигнал 6, исходя из необходимого сочетания управлений, формируемых каналом с переменной структурой и каналом с постоянными параметрами в соответствии с режимами, описанными для фиг, 2, В пороговом Устройстве б коммутатора 4 производится сравнение модуля сигнала и с onopHbifJi сигналом g(g const, ) и формирование промежуточного сигнала управления UJ, в зависимости от результатов сравнения: при пороговое устройство б не пропускает сигнал и, т,е, при /U-, пороговое устройство б пропускает сигнал и , т,е. , , где k передаточный коэффициент, Дальнейшее прохождение сигнала uJ| обуславливается переменной структурой , Переключатель 7 в коммутаторе 4 коммутирует U в зависимости от сигнала логики f: Го при Ч 1 при 0, Сумматор 5 формирует выходной сигнал 6 на основе сравнения сигналов U и и, т,е, 6 . (или U-i + U/j) . Таким образом, при малых значениях сигнала управления U-i : /( Б осуществляется режим управления без переключения сигнала управления (фиг, 2 , внутренняя область, ограниченная 0. ) определяемой двумя прямыми g и и -е) , .т,е, 6 и, и может быть адаптивным - с изменением параметров а и а или неадаптивным, но со значениями этих параметров. обеспечивающими устойчивость при имегацемся диапазоне нестационарных динамических коэффициентов. При :j, регулятор обеспечивает выбор управления с режимом переменной структуры (фиг. 2, нару)хная область, огра ниченная границей г ): -Uj при Ч О И при If О Сигнал воздействует на исполнитель ные органы системы. Предлагаемый регулятор позволяет Упростить структурно и функционально разработку системы управления, что повышает надежность и снижает га- баритно-весовые характеристики систе мы управления до 25%. При этом точность процессов регулирования не ухудшается, что подтверждено результатами моделирования и расчетами на ЦВМ. Формула изобретения Регулятор с переменной структурой содержащий последовательно соединеннне формирователь линии переключения, блок сравнения знаков, переключатель и сумматор, второй вход которого соединен со вторым входом блока сравнения знаков и с выходом формирователя сигнала управления, входы которого подключены к соответствуквдим входам формирователя линии переключения, и последовательно соединенные источник опорного сигнала и пороговое устройство, выход которого соединен со вторым входом переключателя, отличающийся тем, что, с целью упрощения и повышения надежности регулятора, в нем выход формирователя сигнала управления соединен со вторым входом порогового устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 354399, КЛ. G 05 В 13/00, 1970. 2.Авторское свидетельство СССР 551609, КЛ. G 05 В 13/02, 1975. 3.Авторское свидетельство СССР по заявке № 2696021/18-24,, КЛ. G 05 В 13/02, 1978 (прототип).
