(54) РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1979 |
|
SU954929A2 |
| Регулятор с переменной структурой | 1979 |
|
SU849141A1 |
| Регулятор с переменной структурой | 1981 |
|
SU993208A1 |
| Регулятор с переменной структурой | 1983 |
|
SU1142812A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Система регулирования | 1981 |
|
SU954933A1 |
| Беспоисковое управляющее устройство | 1978 |
|
SU798702A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Регулятор с переменной структурой | 1980 |
|
SU894673A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
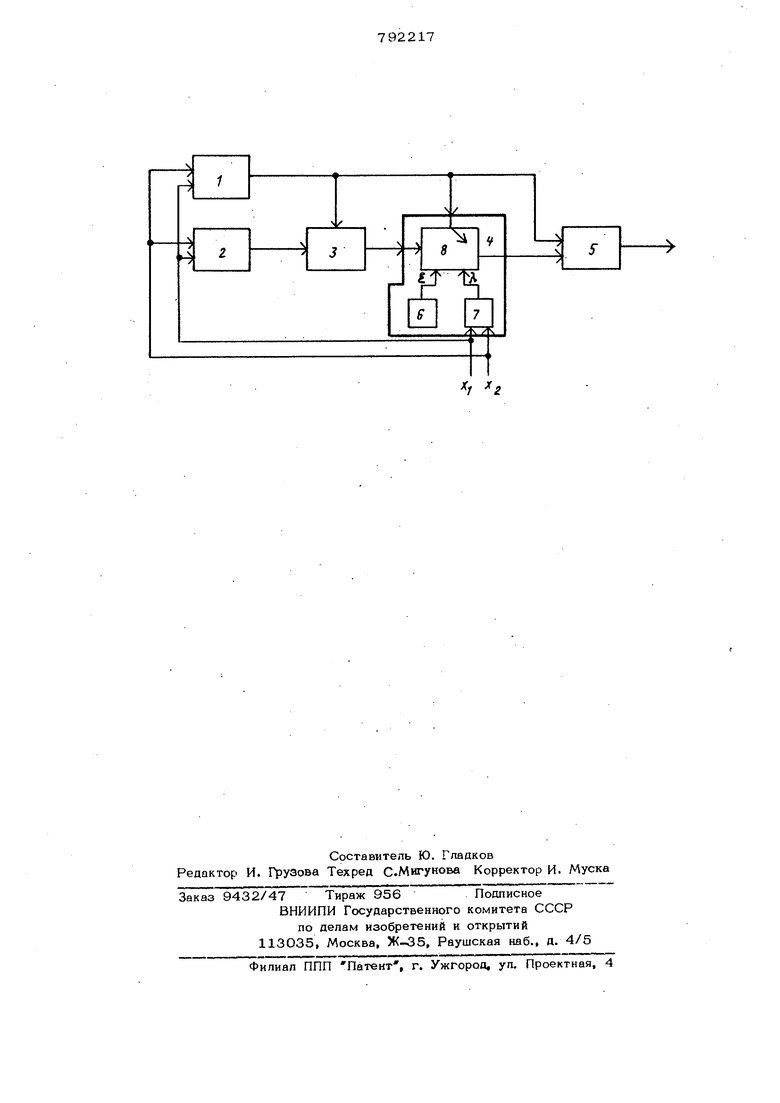
Изобретение относится к устройствам автоматического управления и может най ти применение в системах автоматическог регулирования нестационарными объектами при наличии больших внешних возмуш.ений. Известны регуляторы с переменной структурой, содержащие канал формирования непрерывной компоненты сигнала управления и канал формирования дискретной компоненты сигнала управления, в состав которого входят формирователь пинии переключения, блок сравнения сигналов и коммутатор Jj} 2, З . Из известных регуляторов по технической сущности наиболее близким к изобретению является регулятор с переменной структурой, Содержащий последовательно соединенные формирователь пинии переключения,, блок сравнения знаков и коммутатор, второйн третий входыкоторогоСоединены с соответствующими входами формирователя линии переключения и формирователя сигнала управления, выход которого соединен со вторым входом блока сравнения знаков и четвертым входом коммутатора 4. Недостаток известного регулятора заключается в его низкой точности. Цепь изобретения - повышение точности регулятора. Поставленная цепь достигается тем, что в регуляторе установлен сумматор, входы которого соединены соответственно с выходами формирователя сигнала управления и коммутатора. Блок-схема регулятора представлена ни чертеже. Она содержит формирователь 1 сигнала управления, формирователь 2 линии переключения, блок 3 сравнения знаков, коммутатор 4, сумматор 5, источник 6 опорного напряжения, блок 7 выделения модуля, переключатель 8; и f фазовые координаты системы регулирования. Предлагаемый регулятор работает следующим образом. 379 На основе измеряемых фазовых координат системы в регупяторе формируются сигнал управпеиия U и сигнал пинии перекпюч.ения S. Сигнал управления U формируется формирователем 1 сигнала управ ления в виде комбинации фазовых координат типа U -C«-iX.,-t-aj(.j. Сигнал линии переключения формируется формирователем 2 линии переключения в виде комбинации фазовых координат S C Xf -Cj Xt-Ha основании сигналов и -) и % в блоке сравнения знаков формируется сигналом Cf в виде 1 при Опри Дискретная компонента сигнала управления УЗ, формируется коммутатором 4 в зависимости от поступающих на его входы сигналов U ., X/ и Х2. Сигнал U2 формируется .в коммутаторе 4 линейным изменением сигнала U при разнополярных сигна;ш )1 и Ui и при величине сигнала Л больше уставки , при сигналах /f и Ь любой полярности, но при величине сиг нала меньше уставки ,, сигнал Л фор мируется в блоке 7 выделения модуля как модуль вектора фазовых координат, т.е. Л / X /, где X {X Сигнал уставки , формируется источником 6 опорного напря жения. Величина сигнала выбирается исходя из априорной информации о системе регулирования. Сумматор 5 выделяет выходной сигнал регулятора Q на основе сравнения сигналов U и U2,T.e. 0 JfUJ Таким образом, при малых значениях сигнала вектора фазовых координат осуществляется режим управления беа разрыв ности управления, т.е. ,и может быть адаптивным, с изменением параметров О и а.или неадапТивным, но со значениями параметров 0ц иC}Q,обеспечивающими устойчивость. В режиме с большими значерщями сигналов по /к/ регулятор обеспечивает выбор управления с режимом переменной структуры иСГ или U-1 в зависимости от сочетания полярностей сигналов U и S- Сигнал СГ воздействует на исполнительные органы системы. 7 Предложенный регулятор позволяет эфективно решать проблему сочетания двух видов управления для обеспечения быстродействия в режиме отработки больших рассогласований от действия возмущений и обеспечивает инвариантные показатели качества по обработке рабочих воздействий. Регулятор позволяет также устранить сбои в режиме с разрывным управ- . лением, ибо непрерывная компонента является непосредственным сигналом в формировании управления. Процесс формирова1шя сигнала носит компактный характер, имеет высокую функциональную плотность. Точность регулятора повышена на 40%. Результаты подтверждены моделированием и расчетом по ЦВМ. -В различных САУ регулятор может быть реализован на разных элементах: электромеханических, электронных, митфомодулях, вычислителях и т.д. Формула изобретения Регулятор с переменной структурой, содержащий последовательно соединенные формирователь линии переключения, блок . сравнения знаков и коммутатор, второй и третий входы которого соединены с соответствукдцими входами формирователя линии переключения и формирователя сигнала управления, вЫход которого соединен со вторым входом блока сравнения знаков и четвертым входом коммутатора, от-, лича ющи йся тем, что, с целью повышения точности регулятора, в нем установлен сумматор, входы которого соединены соответственно с выходами формирователя сигнала управления и коммутатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Н 354399, кл. О- 05 В 13/ОО, i97O. 2.Авторское свидетельство СССР № 551609, кл. От 05 В 13/02, 1975. 3.Авторское свидетельство СССР по заявке № 2163856/18-24, кл. G 05 В 13/02, 1975. 4.Авторское свидетельство СССР N9 336644, клОО5 В 13/02, 197О (прототип).
X, /2
