(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU585474A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Электропривод переменного тока | 1988 |
|
SU1548837A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1977 |
|
SU738080A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU728205A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
1
Изобретение.ОТНОСИТСЯ К автоматике и вычислительной технике и может быть использовано в фотокоординатографах; устройствах кодирования графической информации, в пЕ ограммном управлении станками и других устройствах автоматики.
Известны устройства для прогрс1ммного управления шаговым двигателем, состоящие из входного программируемого устройства, регистров расстояния, скорости подачи и задания момента замедления, цифроаналоговых преобразователей, сумматора, порогового детектора, 1 енератора сигнала ступенчатой формы, преобразователя напряжениечастота и выходного устройства системы Управления 11 и Г22.
Недостатками таких устройств является |рложность устройства, а также низкие надежность и КПД.
Наиболее близким по технической сущности к предлагаемому является устройство для програьвиного управления шаговым двигателем, содержащее блок задания программы, соединенный с коммутатором, и шаговый двигатель Гз .
Однако известное устройство имеет недостаточное быстродействие, низкую надежность и .требует применения сложных блоков (например стабилизатора тока, преобразователя цифра-аналог).
Цель изобретения - повышение быстродействия устройства.
Поставленная цель достига1ется тем, что в устройство для nporpaNWHoro управления шаговым двигателем, содержащее блок задания программы, первый выход которого соединен с первым вхо10дом первого коммутатора, введены вторые коммутаторы и последовательно соединенные функциональный интегратор и преобразователь напряжение-частота, выход которого соединен со входом бло15ка задания программы исо вторым входом первого комглутатора, подключенного выходами ко входам вторых коммутаторов, выходы которых соединены с фазными обмоткс1ми шагового двигате20ля, а вход функционального интегратора подключен ко второму входу блока Зсшания программы.
Кроме того, второй коммутатор содержит последовательно соединенные
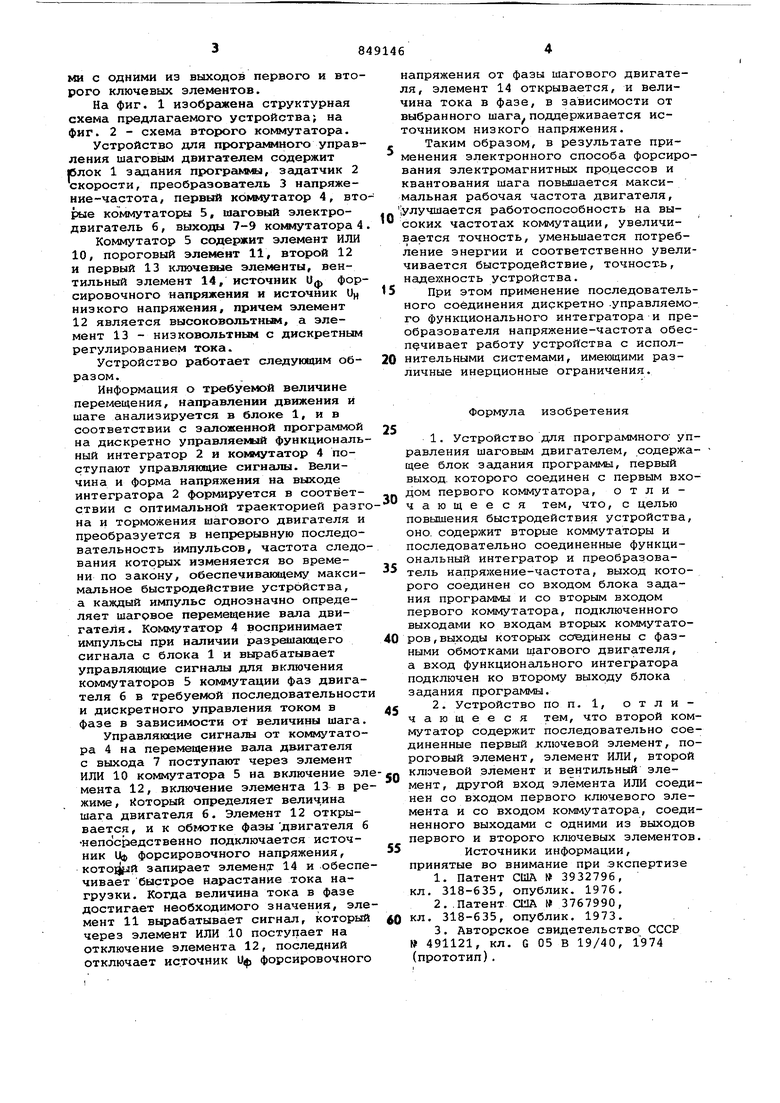
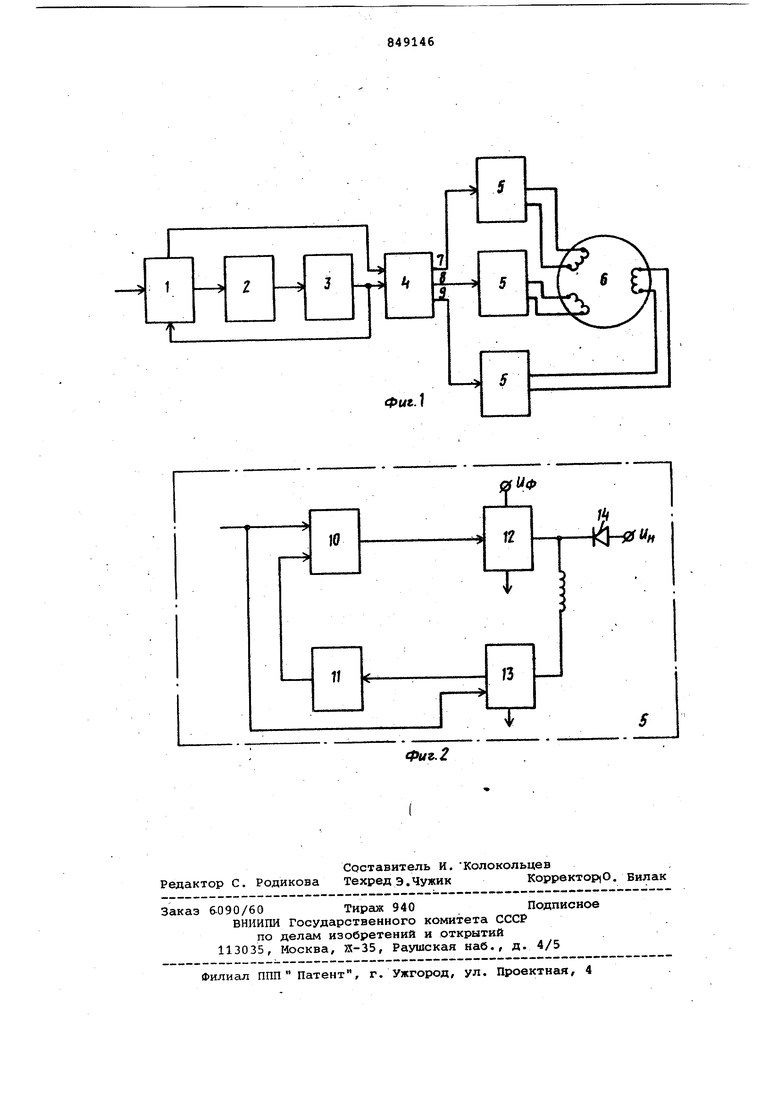
25 первый ключевой элемент, пороговый элемент, элемент ИЛИ, второй ключевой элемент и вентильный элемент, другой вход элемента ИЛИ соединен со входом первого ключевого элемента и со входом коммутатора, соединенного выходаМИ с одними из выходов первого и вто рого ключевых элементов. На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - схема второго коммутатора. Устройство для программного управ ления шаговым двигателем содержит елок 1 задания nporpaMhej, задатчик 2 скорости, преобразователь 3 напряжение-частота, первый коммутатор 4, вт рые коммутаторы 5, шаговый электродвигатель б, выходы 7-9 коммутатора Коммутатор 5 содержит элемент ИЛИ 10, пороговый элемент 11, второй 12 и первый 13 ключеале элементы, вентильный элемент 14, источник Уф фор сировочного напряжения и источник U низкого напряжения, причем элемент 12 является высоковольтньа, а элемент 13 - низковольтным с дискретным регулированием тока. Устройство работает следующим об разом. Информация о требуемой величине перемещения, направлении движения и шаге анализируется в блоке 1, и в соответствии с заложенной программо на дискретно управляемый функционал ный интегратор 2 и коммутатор 4 поступают управляющие сигналы. Величина и форма напряжения на выходе интегратора 2 формируется в соответ ствии с оптимальной траекторией раз на и торможения шагового двигателя преобразуется в непрерывную последо вательность импульсов, частота след вания которых изменяется во времени по закону, обеспечивающему макси мальное быстродействие устройства, а каждый импульс однозначно определяет шагрвое перемещение вгша двигателя. Коммутатор 4 воспринимает импульсы при наличии разрешающего сигнала с блока 1 и вырабатывает управляющие сигналы для включения коммутаторов 5 коммутации фаз двига теля 6 в требуемой последовательнос и дискретного управления током в фазе в зависимости оТ величины шага Управляющие сигналы от коммутато ра 4 на перемещение вала двигателя с выхода 7 поступают через элемент ИЛИ 10 коммутатора 5 на включение э мента 12, включение элемента 13 в р жиме , Который определяет величина шага двигателя 6. Элемент 12 открывается, и к обмотке фазыдвигателя непосредственно подключается источник Цф форсировочного напряжения, котощдй запирает элемен т 14 и обесп чивает быстрое нарастание тока нагрузки. Когда величина тока в фазе достигает необходимого значения, эл мент 11 вырабатывает сигнал, которы через элемент ИЛИ 10 поступает на отключение элемента 12, последний отключает источник иф форсировочног напряжения от фазы шагового двигателя, элемент 14 открывается, и величина тока в фазе, в зависимости от выбранного шага поддерживается источником низкого напряжения. Таким образом, в результате применения электронного способа форсирования электромагнитных процессов и квантования шага повьлиается максимальная рабочая частота двигателя, улучшается работоспособность на высоких частотах коммутации, увеличивается точность, уменьшается потребление энергии и соответственно увеличивается быстродействие, точность, надежность устройства. При этом применение последовательного соединения дискретно .управляемого функционального интегратора и преобразователя напряжение-частота обеспечивает работу устройства с исполнительными системами, имеющими различные инерционные ограничения. Формула изобретения 1.Устройство для программного управления шаговым двигателем, содержащее блок задания программы, первый выход, которого соединен с первым входом первого коммутатора, отличающееся тем, что, с целью повышения быстродействия устройства, оно. содержит вторые коммутаторы и последовательно соединенные функциональный интегратор и преобразователь напряжение-частота, выход которого соединен со входом блока задания программы и со вторым входом первого коммутатора, подключенного выходами ко входам вторых коммутаторов, выходы которых соединены с фазными обмотками шагового двигателя, а вход функционального интегратора подключен ко второму выходу блока задания программы. 2.Устройство по п. 1, отличающееся тем, что второй коммутатор содержит последовательно соединенные первый ключевой элемент, пороговый элемент, элемент ИЛИ, второй ключевой элемент и вентильный элемент, другой вход элемента ИЛИ соединен со входом первого ключевого элемента и со входом коммутатора, соединенного выходами с одними из выходов первого и второго ключевых элементов. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3932796, кл. 318-635, опублик. 1976. 2..Патент США № 3767990, кл. 318-635, опублик. 1973. 3.Авторское свидетельство СССР № 491121, кл. G 05 В 19/40, 1974 (прототип),
Фие.1
Фиг. 2
