..Г
Изобретение относится к электротехнике« в частностик частотнорегулируемым элект }оп|рйводси4, и может использоваться в различных отраслях промышленности: текстильной химической, металлообрабатывсцощей, металлургической и других.
Известен высокодинамичный электропривод с асинхронным короткозгшкнутым двигателемг содержшсщй преобразова- . тёль частоты с автономным инвертором тока, координатные преобразователи, векторные анализаторы, узел формирования задания, блоки перемножения и дифференцирования, регуляторы (скорости потока, тока) и датчики (ско рости потока, тока).
Недостатком этого устройства является нгшичие на валу электродвигателя вращающегося узла - датчика скорости, что снижает надежность и ограничивает область применения устройства.
Наиболее близким к предлагаемому является электропривод переменного тока, содержащий асинхронный электро Двигатель, обмотки статора которого подключены к преобразователю частоты, состоящему из последовательно соединенных автономного инвертора.
сглаживающего дросселя, управляемого выпрямителя с системой управления вы- прямителем, к управляющему входу коIторой подсоединен выход регулятора тока, связанный одним из входов с датчиком тока, другим - с одним из выходов координатного преобразователя, подсоединенного вторым выходом к системе управления инвертором, а одtoним из входов - к выходу блока управления координатными преобразователями, другим входом - к выходу регулятора потокосцепления, третьим входомк выходу регулятора частоты, враще15ния один из входов которого и вход регулятора потокосцепления соединены с узлом згщания, регулятор, второй координатный преобразователь, датчик ЭДС асинхронного электродвигателя
20 и дифференцирующе-инерционное звено, причем один из входов второго координатного преобразователя соединен с выходом датчика ЭДС, второй вход с выходом блока управления координат25ными преобразователями, а выход подсоединен к одному из входов регулятора, второй вход которого связан через дифференцирующе-инерционное звено со входом регулятора потоко30сцепления, выход регулятора подсоедннен ко входу блока управления координатными преобразователями и ко второму входу упомянутого регулятора частоты вращения 2.
Недостатком этого устройства является невысокая точность стабилизации скорости вращения электродвигателя, что обусловлено применением контура регулирования по частоте, отличающейся от скорости вращения на величину скольжения, изменяющегося, с нагрузкой на валу электродвигателя и достигающего для ряда типов асинхронных электродвигателей 3-5% и более. Цель изобретения - повышение точности стабилизации частоты вращения электродвигателя.
Поставленная цель достигается тем что в электроприводе переменного тока, содержащем асинхронный электродвигатель, блок формирования статорного тока, соединенный одним из входов с выходом регулятора частоты вращения другим входом связанный через регулятор потокосцепления с одним из выходов блока задания, вторым своим выходом подключенного к одному из входов регулятора частоты вращения, датчик частоты,дополнительно введены сумматор, блок деления и блок вычисления параметров электродвигателя, причем один из входов блока вычисления параметров электродвигателя соединен со входом регулятора потокосцепления, другой вход - с выходом регулятора частоты вращения, а первый и второй выходы подсоединены соответственно к первому и второму входу блока деления, своим выходом подключенному к одному из входов сумматора, второй вход которого подсоединен к выходу датчика частоты,а выход - ко второму входу регулятора частоты вращения.
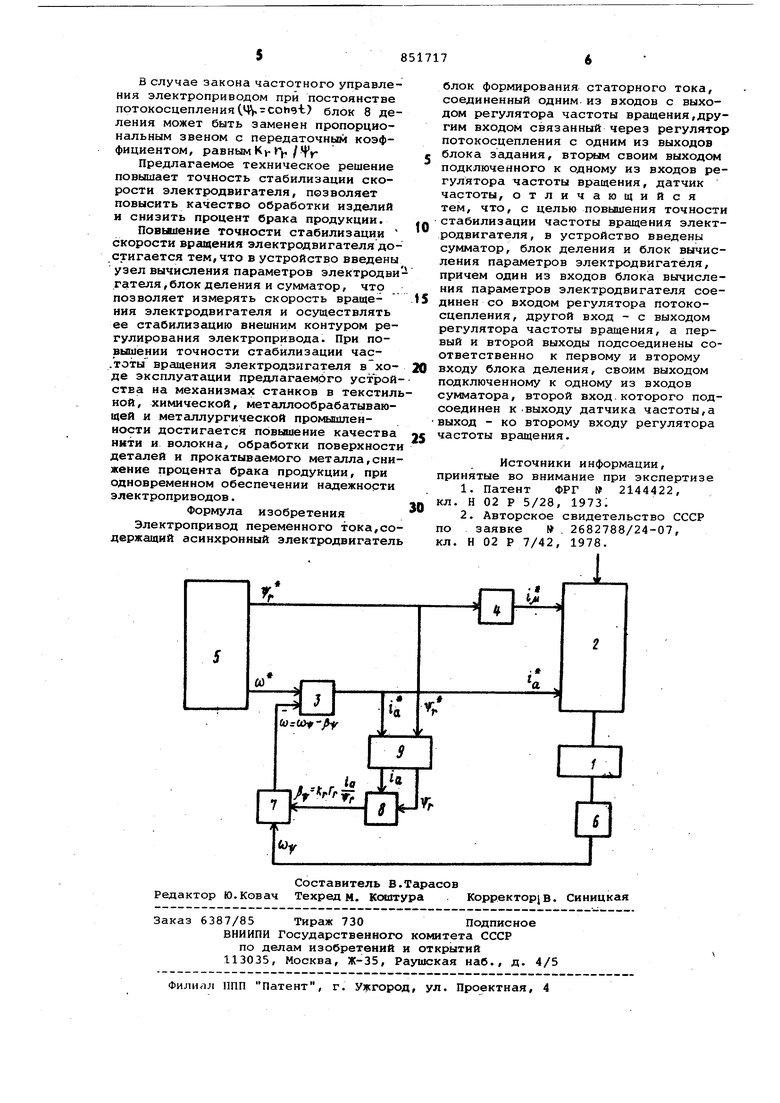
На чертеже представлена функциональная схема асинхронного частотнорегулируемого электропривода.
Электропривод содержит электродвигатель 1, обмотки статора которого подключены к блоку 2 фop шpoвaния статорного тока, соединенному одним из входов с выходом регулятора 3 частоты вращения,другим входом связан- ному через регулятор 4 потокосцепления с одним из входов блока 5 задания , вторым своим входом подключенного к одному из входов упомянутого jpeгyлятopa 3 частоты вращения, датчи 6 частоты, сумматор 7, блок 8 деления и блок 9 вычисления параметров электродвигателя. Один из входов блока 9 вычисления параметров электродвигателя соединен со входом регулятора 4 потокосцепления, другой входс выходом регулятора частоты вращения, а первый и второй выходы подсоединены, соответственно к первому и второму выходу блока 8 деления, своим входом подключенному к одному из
входов сумматора 7, второй второй вход рого подсоединен к выходу датчика 6 частоты, а выход - ко второму входу регулятора 3 частоты вращения. Блок 9 вычисления параметров электродвига, теля выполнен в виде инерционных звеньев.
Устройство работает следующим об разом.
На входы блока 9 вычисления параметров электродвигателя со входа регулятора 4 потокосцепления и выхода регулятора 3 частоты вращения поступают сигналы задания, соответственно потокосцепления f и активного тока /J электродвигателя. Блок 9 вычисления параметров электродвигателя, в соответствии с осуществленной в электроприводе настройкой контуров регулирования потокосцепления и тока, осуществляет вычисление сигналов,прод порциональиых реальным параметрам электродвигателя; потокосцепления М и активного тока д, поступающих на входы блока 8 деления. На выходе блока 8 деления формируется сигнал.
пропорциональный абсолютному скольжению Р электродвигателя ,
|5--К fr
где Гу, - активное сопротивление ротора электродвигателя, КJ, - коэффициент связи ротора,
поступающий на один из входов сумматора 7, на второй вход которого поступает сигнал, пропорциональный угловой частоте (&} вращения электродвигателя с датчика 6 частоты.
На выходе сумматора 7 формируется сигнал, пропорциональный угловой скорости Ш вращения электродвигателя ((It) - W), использующийся в качестве обратной связи внешнего контура регулирования электропривода. При настройке контуров регулирования потокосцепления и тока электропривода по техническому оптимуму,вычисление параметров электродвигателя (потокосцепления и активного тока) с хорошей точностью может осуществляться блоком 9 вычисления параметров электродвигателя, выполненным в виде двух инерционных звеньев :G4(p) иQ-fCPj
V-c.4(p) ia--G,i(P)i
с передаточными функциями
Р- 1
CiHtP)-где ,, - малые постоянные времени соответственно контуров регулирования потокосцепления и тока.
В случае закона частотного управления электроприводом при постоянстве потокосцепления Ч соив-Ь) блок 8 деления может быть заменен пропорциональным звеном с передаточным коэффициентом, равнымКу Г,/Чг
Предлагаемое техническое решение повышает точность стабилизации скорости электродвигателя, позволяет повысить качество обработки изделий и снизить процент брака продукции.
Повышение точности стабилизации скорости вращения электродвигателя достигается тем, что в устройство введены узел вычисления параметров электродвигателя, блок деления и сумматор, что позволяет измерять скорость вращения электродвигателя и осуществлять ее стабилизацию внешним контуром регулирования электропривода. При повышении точности стабилизации час/тоты вращения электродвигателя в ходе эксплуатации предлагаемого устройства на механизмах станков в текстильной, химической, металлообрабатывающей и металлургической промышленности достигается повьлиение качества нити и волокна, обработки поверхности деталей и прокатываемого металла,снижение процента брака продукции, при одновременном обеспечении надежности электроприводов.
Формула изобретения
Электропривод переменного тока,содержащий асинхронный электродвигатель
блок формирования статорного тока, соединенный одним из входов с выходом регулятора частоты вращения,другим входом связанный через регулятор потокосцепления с одним из выходов блока Зсщания, вторым своим выходом подключенного к одному из входов регулятора частоты вращения, датчик частоты, отличающийся тем, что, с целью повышения точности стабилизации частоты вращения элект0родвигателя, в устройство введены сумматор, блок деления и блок вычисления параметров электрюдвигатёля, причем один из входов блока вычисления параметров электродвигателя соеsдинен со входом регулятора потокосцепления, другой вход - с выходом регулятора частоты вращения, а первый и второй выходы подсоединены соответственно к первому и второму
0 входу блока деления, своим выходом подключенному к одному из входов сумматора, второй вход.которого подсоединен кВЫХОДУ датчика частоты,а выход - ко второму входу регулятора частоты вращения.
5
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ 2144422, кл. Н 02 Р 5/28, 1973;
0
2.Авторское свидетельство СССР по заявке № . 2682788/24-07, кл. Н 02 Р 7/42, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электпропривод | 1979 |
|
SU879724A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
