ных механизмов и к выходу блока датчиков перемеш,ений автоогератора.
К недостаткам этого устройства можно отнести следующее: во-первых, в этом устройстве необходимо нрограммировать все онерации для самого длинного цикла обработки, включающего все новторения подготовительных и заключительных подциклов для любой группы одноти-пных ванн; во-вторых, в этом устройстве отсутствует программирование времени выполнения каждой отдельной операции и контроль перемещений по времени. Тем самым отсутствует возможность изменять программы движения и теми выдачи изделий без потери качества покрытий. Кроме того, в устройстве отсутствует защита от одновременных движений, что может вывести из строя всю линию.
Целью настоящего изобретения является устранение указанных недостатков, т. е. повышение надежности и быстродействия устройства.
Эта цель достигается тем, что в устройство введены коммутатор и последовательно соединенные блоки задания выдержки времени, подключенный к счетчику времени, и блок контроля движения автоонератора по времени, по.дключенный к П.юкам управления вертикальным и горизонтальны.ч пере.мещениями автооператора, к счетчику времени и к вь1хода.м блока сравнения и блока управления, входы которого соединеi-ibi с выходами блока датчиков перемещений автоонератора, блока управления горизонтальным переме це1 ием автооператора и блока управления вертикальным перемещением автооператора, подключен юго непосредственно и через коммутатор к блоку ввода программы.
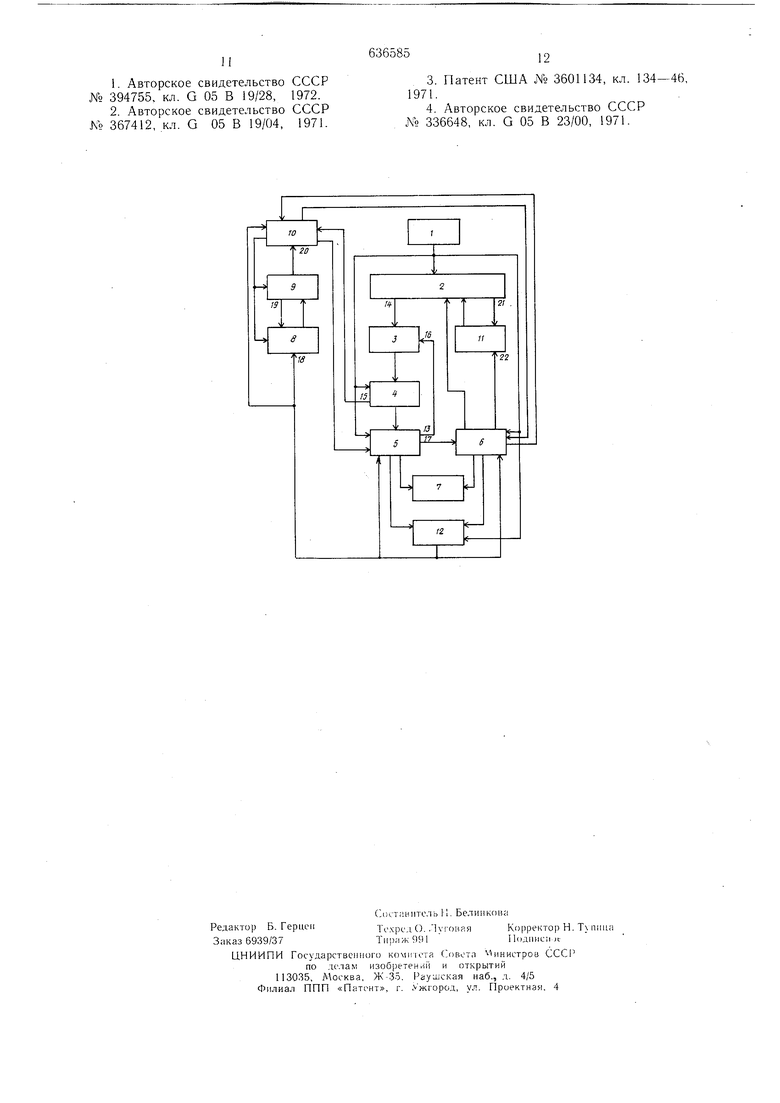
На чертеже представлена блок-схе.ма предложенного устройства, которое содь г;жит блок 1 датчиков перемендений автооператора, блок 2 ввода программы, регистр Li адреса, блок 4 сравнения, блок 5 управления горизонтальным, перемещением автооиератора, блок 6 управления вертикальным перемещением автооператора, блок 7 исполнительных механизмов, счетчик 8 времени, блок 9 задания выдержки времени, бло.к 10 контроля движения автооператора по времени, коммутатор 11 и блок 12 управления.
Блок 1 датчиков перемещений автооператора предназначен для фиксации положе ния автооператора в пространстве движений. Этот блок содержит датчик верх1 его и нижнего положений автоонератора и датчики фиксации положения .пьтооператора на горизонтальной оси движения. Фиксация положения автооиератора на горизонтальной оси может производиться и единично.м, дво1 чном или любом п-ичном коде. Разрядность кода определяет .максимально возможное число фиксируемых позиций. Для двухскоростиых автооиераторов номер каждой позиции, может фиксироваться трижды - первый ;;из при подходе к позиции (для снижения скорости), второй раз точно на позиции и третий раз при съезде с позиции (для увеличения скорости). При при.менении любого кода, кроме единичного, блок датчиков должен 5 содержать датчик точной остановки, предназначенный для определения мо.мента, в который состояние всех остальных датчиков может быть считано без ощибки. Эта возможность должна определяться конструкд цией датчиков (например, для индуктивных или фотодатчиков флажок датчика точной остановки должен быть короче флажков всех остальных датчиков фиксации горизонтального положения автооператора). В разработанном варианте устройства используется двоичный код для фиксации но.мера позиции.
Блок 2 ввода программы предназначен для ввода программ движения автооператора и содержит последовательно соединен- ные дещифратор, ко.ммутатор ввода програ.мм и шифратор. Конструкция этих подблоков зависит от формы представления входной и выходной информации блока ввода программы. Так, если фиксация положения автооператора производится в двоичном коде, а ввод адресов движения в десятичном, то дешифратор является преобразователем из двоичной фор.мы в десятичную, щифратор - обратным преобразователем, а коммутатор ввода програм.м состоит из логических ключей, присоединяющих выходы
0 деи1ифратора к входам шифратора. Существенным здесь является то, что дещифратор состоит из двух идентичных частей, предназначенных для управления адресацией при движении по верху и по низу. Один яз вхо-дов каждой из этих частей соединен с соответствующим выходом блока управления вертикальны.м перемещением автооператора. Один из входов элементов, составляюпдих пифратор, присоединен к выходу блока управления вертикальным пере.мещоние.-.
изтооператора.
Регистр 3 адреса содержит триггеры ino числу разрядов используемого кода). Все входы сброса этих триггеров обт1единены и соединены с четвертым выходом 13 блика 5 управлен11я горизонтальным перемещение:.;
aBTOonepaTijjia, а входы записи соед нс;;;- с выхода.мп 14 шифратора блока 2 влода программ;.Блок 4 сравнения предназначен длк сравнения a.ir.-eca, записанного в регистре
0 3 адреса, с текущим поло :-;ением автоопераюра, определяемы. .; по состоянию дат-;,.::эз 1 Этот блок предст-авляет собой устр(.й:;тво ;ьчя сравнения кодов. Число провод-о:. каждом входно:л канале этого блока г(-:твстствует числу разрядов в кодах адое- и
-- номера позиции, занимаемой автооп j::TCром. Схемы сравнения каждого разряда Lie;-тичны и каждая из них имеет по два Bxo;;.;i и три выхода. Один из входов присоедмняется к соответствующему разряду рог.истра адреса, а другой к соот.п:-:Т тьую;иг..,
датчику горизонтального положения автооператора. Каждый разряд блока сравнения имеет три выхода («больше, «равно, «меньше), которые составляют выходной канал блока. Кроме того, на второй выход 15 этого блока выдается сигнал о наличии записи в регистре 3 адреса. Выходные схемы совпадения блока 4 сравнения присоединены к датчику точной остановки, сигнал с которого разрешает произвести сравнение кодов.
Блок 5 управления горизонтальным перемешением автооператора содержит четыре триггера, назначение которых следующее. Первый триггер выбирает направление движения. Его входы соединены с выходами «больше - «меньше блока сравнения. Второй триггер выбирает скорость движения. Его входы возбуждения соединены с выходом «равно блока 4 сравнения и с выходо.м блока зашиты движения, а вход сброса через элемент И-НЕ присоединен к датчику точной остановки. Ко второму и третьему входам эле.мента И-НЕ присоединены выходы третьего и четвертого триггеров, .которые управляют трогание.м и остановкой автооператора. Входы третьего триггера присоединены к датчику точной остановки, первому и четвертому триггерам, а входы четвертого триггера присоединены к датчику точной остановки и второму .триггеру блока 5 управления горизонтальным перемещением автооператора. Выходы всех триггеров присоединены к блоку 7 исполнительных механизмов, к блоку 6 управления вертикальнь м перемещением автооператора и к второму входу 16 регнстрг адреса.
Блок 6 управления вертикальным перемещением автооператора предназначен для управления движением автооператора в вертикальной плоскости, управления работой дешифратора в блоке 2 ввода программы, коммутатором 11 и блоком 10 контроля движения автооператора по времени. Блок управления вертикальным перемещением автооператора содержит два триггера и логические элементы. Первый триггер управляет направлением движения, работой дешифратора и коммутаторо.м. Входы этого триггера присоединены к выхода.м блока 5 управления горизонтальным перемещение.м автооператора, блока 1 и блока 12, а выходы через логические элементы И подключены к блоку 7 исполнительных механизмов, блоку 2 ввода программы, коммутатору 11 и блоку 10 контроля движения автооператора по времени. К входам элементов И подключены выход 17 б.тока 5 управления горизонтальным перемещением автооператора, выход второго триггера блока 6 управления вертикальным перемещением автооператора, выход блока 12 управления, выход блока 10 контроля движения автооператора по времени и выход блока 1. Второй триггер в этом блоке служит для всномогательных целей. Он запоминает про.межуточную информацию во время работы блока 6 управления вертикальным перемещением автооператора.
5Блок 7 исполнительных механизмов содержит двигатели, приводящие в движение автооператор.
Счетчик 8 времени предназначен для подсчета вре.мени работы всех элементов линии. Этот блок содержит генератор меток вре.мени, входной элемент запрета, три декадных распределителя, счетчик кратковременных выдержек и триггер установки. Генератор через элемент запрета присоединен к входу счетчика. Второй вход элемента запрета соединен с выходом блока 12 управления. Установочные входы триггеров, входящих в декадные распределители, соединены с выходом триггера установки. Выходы декадных распределите.чей подключены к блоку 9 задания выдерл ки времени. Входы счет0чика кратковременных выдержек присоединены к выходу предварительного счетчика и выходу блока 10 контроля движения автооператора по времени. Входы триггера установки присоединены к выходу 18 блока 12 25 управления, к выходу генератора и выходу 19 блока 9 зада)1ия выдержки времени.
Блок 9 задания выдержки времени содержит логические элементы и наборные поля или ключи для ввода програмЛ времени. Ключи для ввода программ устанавливают
0 соединение ме.жду выходом счетчика 8 времени и выходами логических элем-снтов. Выходы логическйх элементов соединяются с выходо.м блока задания выдержки времени, присоединенного к блоку 10 контроля движения автооператора по времени. Другие
35 входы выходных логических элементов подключены к выходу триггера установки в счетчике 8 времени.
Блок 10 контроля движения автооператора по времени предназначен для слежения
0 за прави,1ьной отработкой движений в заданных интервалах времени остановкой линии при нарушении заданных интервалов. Этот блок содержит три триггера и логические элементы. Входь логических элементов присоединены к выходу 20 блока 9 за Дания выдержки времени, к выходу блока 12 управления и выходам блока 6 управления вертикальным перемещением автооператора и второму выходу блока 4 сравнения. К выходам этих логических элементов подQ ключены входы триггеров, которые одновременно соединены с выходами других триггеров внутри этого блока. Выходы первого и третьего триперов являются выходами
блока. С)к1 присоединены к блокам Viip;; лепиь 6 вертикальным и управления 5 гоpH3C)HT;.ibiii iM перемещениями автооператора, счетчику 8 времени и блоку 9 задании выдержки времени.
Коммутатор 11 имеет следующее назначение, В /niHMii может быть несколько групп ванн, мли-чощих |)Д1 наковое назначение (например, ванны основного нокрытия). Порядок, но которому производится занолнен.ие чтих ванн, может быть определен при построении линии. Это может быть загрузка по запросам от свободных ванн, или пик:1ичсский обход, или какой-то другой порядок, устанавливаемый при нроектировании линии. Для каждой из этих групп ванн программа обработки в остальных ваннах одинакова. Поэтому при отсутствии коммутатора приходится для каждой ванны в группе повторить всю программу целиком, за исключением последней операции выбора адреса ванн,ы внутри выделенной группы одинаковых eain-i. Между тем этот выбор можно автоматизировать п адресовать выполнение программы непосредственно в группу, а выбор адреса внутри группы поручить специальному блоку, работающему по определенному заранее или отдельно запрограммироBaiiHOMy закону. Таково назначение коммутатора для внутригрупповой селекции,
В реа,1113ованном варианте устройства принят циклический порядок загрузки группы одпотипны,х ванн. При этом коммутатор содержит перестраиваемый по длине сдвиговый регистр. Входы от ключей, управляюпщх перестройкой, и входы записи начального адреса соединены с выходом 21 блока 2 ввода программы. Вход 22 сдвига соединен с специальным выходом блока 6 управления вертика;1ьНым переменхеннем автооператора. Вьгходы ячеек регистра соединены непосредствепно с входом П1ифрат(;)а в блоке 2 ввода программы, Такп,м образом входы записи ком.мутатора привязывают выделенную группу к определенному адресу, а выходы его непосредственно воздействуют на Н1ифратор и через него на регистр адресования. Программирование на ключах, управляюпхих длиной регистра в коммутаторе, позволяет настроиться на заданное число Baiui в выделенной группе. Все это coKpanuiCT общую д,:1и.му вводимых нрограм.м и уирои1ает управление /пп-ией.
Блок 12 управления нредназначен для унравления пуском и защитой движения и уиравляет выходами блоков, с которыми соединены его выходы. Этот блок содержит три триггера с входными логическими элемента,1И I управляющие кнопки. Входы логичес.кпх элементов присоединены к датчикам верхнего п нижнего положений автооператора, к датчику точной остановки, к датчикам, опрсделяюнгим начальное положение линии, II к выходам блоков управления вертикальным и горизонтальным перемещениями автооператора. Первый и второй триггеры служат для начальной установки всех элементов устройства, третий триггер предназначен д,1я управленпя пуском и блокировкой выходов блоков при неверном срабатывании какого-либо пз элементов схемы (например, при гк)яв,:|енпи управ,ляющег-о сигнала одновременно на двух выходах).
Рассмотрим работу устройства на примере управления линией, состоящей из 15 ванн и содержащей одну грунпу из четырех одинаковых ванн основного покрытия,
Перед началом работы программа движения автооператора и програм,ма выдержек вре.мени должны быть введены в соответствующие блоки, где устанавливаются необходи.мые соединения. Автооператор устанавливается в начальное положение, ПаЖатием кнопки «сброс первый триггер в блоке- 12 управления устанавливается в единичное состояние. Сигналом со своего он устанавливает в единичное состояние второй и через него третий триггеры в этом блоке,
5 Эти триггеры переводят все блоки в начальное состояние. После этого нажимается кноп ка «Пуск и триггеры в блоке 12 управления переходят в нулевое состояние, разблокируя выходы блоков 6 управления вертикальпым и 5 горизонтальным перемещениями автооператора, а также запуская счет времени в счетчике 8 времени. Счет времени может быть остановлен в любой момент нажатием кнопки «Остановка и запущен вновь нажатие.м кнопки «Пуск,
5 После отсчета первого интервала времени блок 9 задания выдержки времени вы,аает метку времени в блок 10 контроля движения автооиератора но времени. Каждая метка времени состоит из двух ноложительных импульсов длительностью 3 сек каж0 дьи1, Игг.гервал между ними равен времени, пеобходи.мому на гюдъем траверсы автооператора и стекание электролита, Г1рогра.1мируется начало метки. Длительность интерва.та постоянна.
Перед приходом метки времени триггеры в блоке 10 контроля движения автооператора по времени находятся в исходном (нулево.м) состоянии, С приходом первого импульса метки времени первый триггер в блоке 10 контроля движения автооператора
О времени переходит в единичное состояние, посылая соответствуюи.1ий сигнал в блок б управления вертикальны.м перемещением автооператора,
Пачинается подъем траверсы автооператора. По окончании первого импульса второй триггер блока 10 контроля движения автооператора по вре.мени переходит в единичное срстояние,. Если к приходу второго импульса .метки траверса находится в верхне.м положении, то первый триггер перейдет в исходное состояние и выдаст сигнал
на начало горизонтального пере.мещения. Если по каким-то причинам траверса не поднимется, то третий триггер перейдет в единичное состояние, заблокирует счетчик 8 времени и включит аварийный сигнал. Второй триггер блока 10 контроля движения автооператора по вре.мени переключается по счетному входу на заднем фронте каждого импульса, так что к началу очередной метки он находится в исходном состоянии. Работа эле.ментов блока новторяется на каждой
метке времени. Запись адреса в регистр 3 адреса происходит по сигналу от блока 6 управления вертикальным перемещением автооператора. Этот адрес сравнивается в блоке 4 сравнения с текущей позицией автооператора, определяемой по датчикам, фиксирующим его положение.
В результате сравнения устанавливается первый триггер в блоке 5 управления горизонтальным перемещением автооператора. Этот триггер определяет направление следующего горизонтального движения автооператора.
Сигнал от блока 10 контроля движения автооператора по времени через блок 5 уп 1авления горизонтальным перемещением автооператора включает движение автооператора на малой скорости.
При первом переходе датчиков положения в нулевое состояние срабатывает третий триггер в блоке 5 управления горизонтальным перемещением автооператора и через специальную схему совпадения выдает сигнал на выход блока 5, который подготавливает блок 6 управления вертикальным перемещением автооператора к выполнению следующего вертикального движения. Этот блок переключает выходы дещифратора в блоке 2 ввода программы. При следующе.м срабатывании датчиков на позиции, с которой съезжает автооператор, сбрасывается второй триггер в блоке 5 управления горизонтальным перемещением автооператора. Тем самым включается больи1ая скорость автооператора. Затем четвертый триггер в этом блоке переходит в нулевое состояние. Автооператор движется на большой скорости до позиции, адрес которой записан в регистре 3 адреса. При первом срабатывании датчиков на этой позиции блок 4 сравнения выдает сигнал «Равно в блок 5 управления горизонтальным перемещением автооператора, и второй триггер в этом блоке переходит в единичное состояние, включая малую скорость. При переходе датчиков в нулевое положение срабатывает третий триггер и сбрасывает регистр 3 адреса. При повторном срабатывании датчиков (центр позиции) открывается схема совпадения, которая выдает сигнал на остановку и на перевод четвертого триггера в единичное состояние. Автооператор останавливается и-начинается вертикальное движение траверсы по сигналу от блока 10 контроля движения автооператора по времени-.
При управлении односкоростным автооператором схема переключения скоростей в блоке 5 управления горизонтальным перемещением автооператора может быть заблокирована.
. Таким образом происходит перемещение автооператора по заданной программе.
Нарущение времени работы агрегатов ли НИИ и отсутствие записи адреса в необходимые моменты контролируются блоком 10 контроля движения автооператора по времени. Остальные иаруиюимя. в том числе неисправности датчиков и хь ментов схемы, контролируются блоком 12 уяравления. Эти блоки закрывают выходы устройства к блоку исполнительных механ1м юв, останавливают счетчик времени и о.:новременно выдают аварийный сигнал. Такой способ остановки устройства позволяет при наименьших потерях времени найти неисправность и запустить его вновь с прерванного момента, НС переводя все агрегаты в начальное состояние. Тем самым этот способ снижает потери качества покрытий.
Таким образом, описанное устройство позволяет упростить программирование движений, позволяет сократить объем счетчика времени и дает возможность просто программировать выдержки времени на единой системе отсчета меток, позволяет контролировать работу линии во времени, обеспечивая ритмичность выдачи изделий и высокое их качество. Кроме того, это устройство позволяет управлять двухскоростными автооператорами, как в однооператорных, так и в многооператорных линиях.
25
Формула изобретения
Устройство Д.1Я программного управления автооператором гальванической линии,
содержащее блок управления и последовательно соединенные блок датчиков перемещений автооператора, блок вьода программы, регистр адреса, блок сравнения и блок управления горизонтальным перемещением
автооператора, вход которого соединен со входо.м блока сравнения и с выходо.м блока датчиков перемещений автооператора, а выходы - со входами регистра адреса, счетчика времени, блока исполнительных механизмов и блока управления вертикальным
перемещением автооператора, подключенного ко входу блока исполнительных механизмов и к выходу блока датчиков перемещений автооператора, отличающееся тем, что, с целью повьпиения надежности и быстродействия устройства в него введены ко.ммутатор и последовательно соединенные блок за.1апия выдержки времени, подключенный к, счетчику времени, и блок контроля движения автооператора по времени, подключенный к блока.м управления вертикальным н горизонтальным перемещениями автооператора, к счетчику времени и к выходам блока сравнения и блока управления, входы которого соединены с выходами блока датчиков перемещений автооператора, блока управления горизонтальным перемещением автооператора и блока управления вертикальным перемец.1.ением автооператора, подключенного непосредственно и через коммутатор к блоку ввода программы.
Источники информации, принятые во вни мание ггри экспертизе:
11
1.Авторское свидетельство № 394755, кл. G 05 В 19/28,
2.Авторское свидетельство Ко 367412, кл. G 05 В 19/04,
636585
3.Патент США № 3601134, кл. 134-46, 1971.
4.Авторское свидетельство СССР Л 336648, кл. G 05 В 23/00, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для определения порядковых номеров ванн гальваноаппарата | 1982 |
|
SU1057959A1 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
