(54) ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Весовое устройство с зафиксированной грузоприемной платформой | 2023 |
|
RU2815856C1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Устройство для сборки ящиков в стопки | 1973 |
|
SU611838A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Устройство опрокидывания контейнеров для разгрузки | 1987 |
|
SU1498679A1 |


1
изобретение относится к весоиз мерительной технике, в частности к весовым устройствам, встраиваемым в технологические линии.
Известно весоизмерительное устройство, содержащее весовой механизм, подвижную и неподвижную гребенки со скошенными в сторону движения зубьями, шарнирно закрепленные на неподвижной гребенке подхваты, имеющие посадочные места в виде впадин под изделие ГО
Однако устройство не может быть использовано для взвешивания крупногабаритных грузов, например ящиков, перемещаемых цепным конвейером.
Ближайшим по технической сущности к предлагаемому является весоизмерительное устройство, содержащее встроенные в цепной конвейер платформенные весы, грузоподъемное приспособление и механизм ориентации груза относительно платформы весов с приводом 23 .
Известное устройство не имеет необходимой надежности и имеет ограниченную область использования, так как его загрузка возможна только по ходу транспортирования грузов. Загрузка же с конвейеров, расположенных перпендикулярно основному, невозможна. Цель изобретения - повышение надежности устройства и расширение области его использования. .
Цель достигается тем, что в устройстве грузоподъемное приспособление выполнено в виде расположенной в вертикальных направляющих каретки с кронштейнами для груза и с подпятником для ее фиксации в верхнем положении и катушки с ребрами - упорами, смонтированной на оси, закрепленной на вертикальных направляющих и снабженной фланцами, между которыми распог ложены попарно ролики и в верхнем из которых выполнены углубления под шарики, подпружиненные и закрепленные 3 вертикальных направляющих, а механизм ориентации груза выполнен в виде горки с шарнирно закрепленным на ней подпружиненным рычагом, смонтированной в горизонтальной направляющей, установленной между вертикальишми направляющими и закрепленной на раме платформенных весов.
На фиг. I изображено устройство, общий вид; на фиг. 2 разрез А-А
; на фиг. 3 на фиг. Р1аэрез Б-Б
1; на фиг. 4 на фиг. разрез В-В
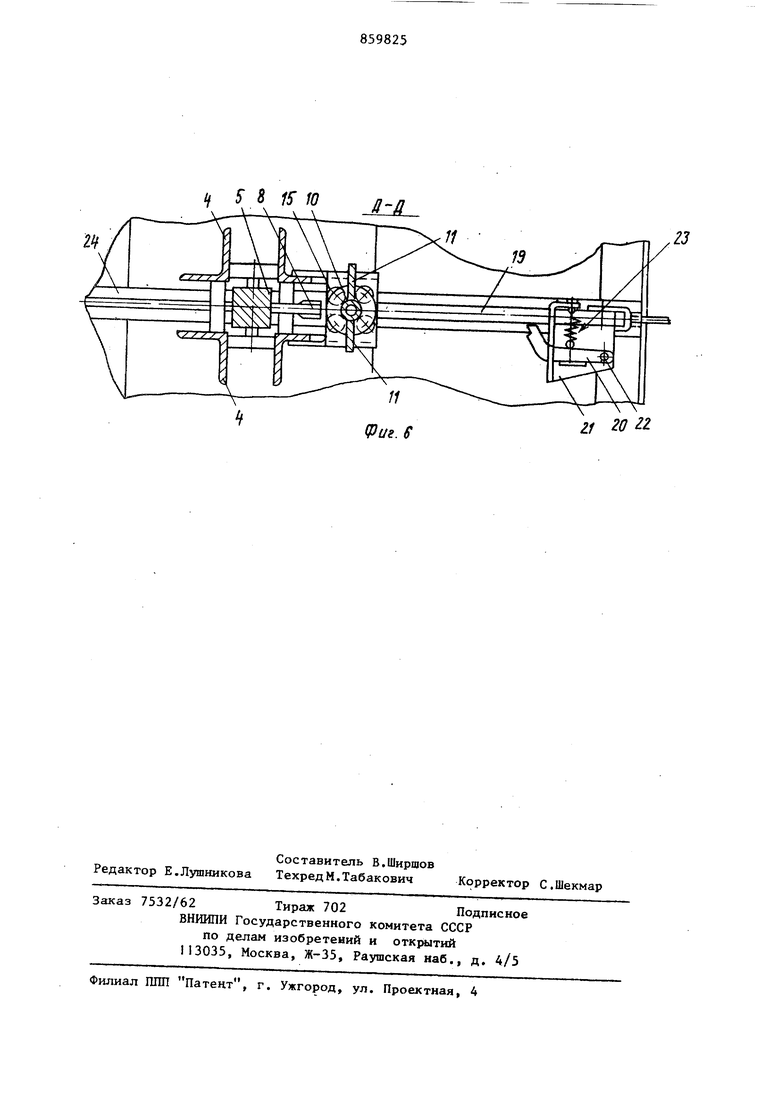
1J на фиг. 5 на фиг. вид по стрелке Г на фиг. 1; 6 - разрез на фиг.
Д-Д на фиг. I.
Устройство содержит грузоприемное приспособление 1, механизм 2 ориента ции грузов относительно платформы 3.
Грузоприемное приспособление 1 состоит из вертикальных направляющих 4 для каретки 5, имеющей ролик 6, два кронштейна 7 и подпятник 8. На вертикальных направлякщих 4 на оси 9 (фиг. З) закреплена катушка 10, имеющая рёбра-упоры 11, верхний фланец 12 и нижний фланец 13, между которыми на осях 14 смонтированы четыре ролика 15.
В два гнезда, выполненные в вертикальных направляющих 4, заложено по шарику 16, которые прижаты к фланцу 12 катушки 10 пружинами 17 посредством регулировочных винтов 18 (фиг. 4).
Механизм 2 ориентации грузов вьтолнен в виде горки 19 (фиг. 6), на которой закреплен рычаг 20 посредством кронштейна 21, оси 22 и пружины 23. Горка I9 смонтирована в горизонтальной направляющей 24 (фиг. 1), которая проложена внутри вертикальных направляющих 4 и закреплена на раме 25 весов. Горка шатуном 26 и кривошипом 27 связана с приводом 28.
На раме 25 установлен конечный выключатель 29, а на цепном конвейере 30 конечный выключатель 31. На конвейе ре 30 закреплены платформы 32 под ящики 33, в которых транспортируется груз, например пряжа.
На фиг. 1 показано исходное положение устройства, при котором горка 19 находится в крайнем правом положении а каретка 5 внизу опирается роликом 6 ка горизонтальный участок горки 19
Устройство работает следующим образом.
При включенном цепном конвейере 3 Я1ЦИКИ 33 поступают для взвешивания. Ящик 33 воздействует на конечный выключатель 31 и отключает привод цепного конвейера 30, а привод 19 под ключает к электросети.
Кривошип 27 совершает оборот, в конце которого воздействует на конеч-г ный выключатель -29, который отключает привод 28. За это время горка 19 совершает в направляющей 24 перемещение в крайнее левое положение и воэвращается обратно. При перемещении горки 19 влево ролик 6 катится по наклонной части горки 19 и поднимает каретку 5. Кронштейны 7 проходят между связями платформы 32, упираются в дно 5 ящика 33 и поднимают его над конвейером 30. Когда ролик б выкатится на горизонтальный участок горки.19, подпружиненный рычаг 20 войдет во взаимодействие с катушкой 10. Своей выемкой рычаг 20 упирается в ролик 15 ка- тушки и поворачивает .ее вокруг оси 9 на 90 . Подпружиненные шарики 16 фиксируют катушку 10 в новом положа НИИ. В конце поворота ребро-упор 1I катушки 10 окажется под подпятником 8 каретки 5. Движение горки 19 влево закончилось. Теперь она будет двигаться обратно в исходное положение. Ролик 6 каретки 5 покатится по горизонтальному участку горки 19, затем перейдет на наклонный участок, и здесь каретка 5 подпятником 8 упрется в ребро-упор 11 катзгагки 10. Каретка зависает в направляющих над горкой 19, которая уйдет из-под ролика 6 каретки в крайнее правое положение, , Ящик 33 вместе с кареткой 5 вертикальными направляющими 4 окажется на платформе весов. Весовщица взвешивает груз, нажимает на кнопку включения привода 28 устройства; кривошип 27 сделает полный оборот и остановится; горка 19 совершит возвратнопоступательное движение. При перемещении влево горка верхней частью наклонного участка воздействует на ролик 6 и немного поднимает ящик 33, каретку 5 и подпятник 8 над ребромупором 11. При выходе ролика 15 на горизонтальный участок горки 19 подпружиненный рычаг 20 входит во взаимодействие с катушкой 10. Своей выемкой рычаг 20 упирается в ролик I5 катушки и поворачивает ее вокруг оси 9 на 90. Подпр51жиненные шарики 5 16 фиксируют катушку 10 в новом положении. При этом повороте реброупор 11 катушки уходит из-под подпятника 18. Теперь при движении горки 19 в правое крайнее положение ролик покатится сперва по горизонтальному, потом по наклонному участкам горки и остановится на нижнем горизонтальном участке горки 19, При этом ящик 33 опускается на платформу 32 конвейера 30, а кронштейны 7 опускаются под полотно цепного конвейера. В конце оборота кривошип 27 воздействует на конечный выключатель 29, который отключает привод 28, а привод конвейера Зи подключает к электросети. С пуском конвейера 30 следующий ящик поступает на взвешивание. Технико-экономическая эффективнос обусловлена положительным эффектом, который заключается в повьш1ении надежности, упрощении транспортировки грузов, в возможности осуществления взвешивания грузов при перпендик лярном расположении подводящего и от водящего конвейеров к основному, эко номии площади, упрощении обслуживани устройства. Формула изобретения Весоизмерительное устройство, содержащее встроенные в цепной конвейер платформенные весы, грузопри56емное приспособление и механизм ориентации груза относительно платформы весов с приводом, отличающееся тем, что, с целью повышения его надежности и расширения области использования, в нем грузоприемное приспособление выполнено в виде расположенной в вертикальных направляющих каретки с кронштейнами для груза и с подпятником для ее фиксации в верхнем положении и катушки с ребрами-упорами, смонтированной на оси, закрепленной на вертикальных направля ющих и снабженной фланцами, между которыми расположены попарно ролики и и в верхнем из которых вьшолнены углубления под шарики, подпружиненные и закрепленные в вертикальных направляющих, а механизм ориентации груза выполнен в виде горки с шарнирно закрепленным на ней подпружиненным рычагом, смонтированной в горизонтальной направляющей, установленной между вертикальными направляющими и закрепленной на раме платформенных весов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 682424, кл. В 65 G 25/04, 1977. 2. Авторское свидетельство СССР № 102974, кл. G 01 G 11/02, 1954. (прототип).
Сриг.2
Ы
6-6
Вид Г
1 33 зг
(put. 5
f « /5-r l If 20 i
