(54) СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Устройство для регулирования частоты вращения асинхронного двигателя | 1980 |
|
SU936326A2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU1023607A1 |
| Устройство для регулирования скорости частоты вращения асинхронного двигателя | 1979 |
|
SU936324A2 |
| Устройство для регулирования частоты вращения асинхронного двигателя | 1979 |
|
SU860252A1 |
| ЭЛЕКТРОБУР ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН (ВАРИАНТЫ) | 2003 |
|
RU2321717C1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1092689A1 |
| Многодвигательный электропривод переменного тока | 1980 |
|
SU1023609A1 |
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU1046887A2 |
Изобретение относится к электротех- нике и может быть использовано преимущественно в элек роприводе крановых механизмов .Известен способ управления асинхронным двигателем с тиристорным коммута тором в цепи ротора, заключающийся в том, что подают напряжение питания на обмотку статора, измеряют напряжение в обмотке ротора, и формируют сигнал на включение тьристрров коммутатора, причем сигнал измеренного напряжения складывают с сигналом измеренного тока и полученный сигнал, пропорциональный ЭДС ротора, вычитают от задающего напряжения, полученную разность усиливают и в соответствии с ее величиной устанавливают скв1ажность включения тиристоров коммутатора Ll. Недостаток известного способа - его сложность в связи с тем, что цля выделения сигнала, пропорционального ЭДС обмотки ротора, необходимо выделять сиг нал по току ротора, причем измерение пр изводится непрерывно вне зависимости от состояния коммутатора, что приводит к пульсации напряжения измеряемых величин, изменяемых не только от величины скольжения двигателя, но и от частоты коммутации тиристоров, что определяет слож- ность точного измерения; разность сигналов, (по ЭДС ротора и задающего) необходимо усиливать и формировать дополнительный сигнал, идущий на включение тиристоров коммутатора. Цель изобретения - упрощение способа управления асинхронным двигателем. Поставленная цель достигается тем, что в способе управления асинхронным двигателем, который заключается в том, что подают напряжение питания на обмотку статора, измеряют напряжение в обмотке ротора и формируют сигнал на включение тиристоров коммутатора; перед на чалом коммутации очередного тиристора коммутатора измеренное напряжение в обмотке ротора сравнивают с установленным значением и в случае его превыше-
ния измеренный сигнал поцают в цепь управляющего электрода тиристора, после чего цепь измерения разрывают, а по окончании коммутации упомянутое напряжение вновь измеряют и подают .его на управляющий электрод слецующего коммутируемого тиристора.
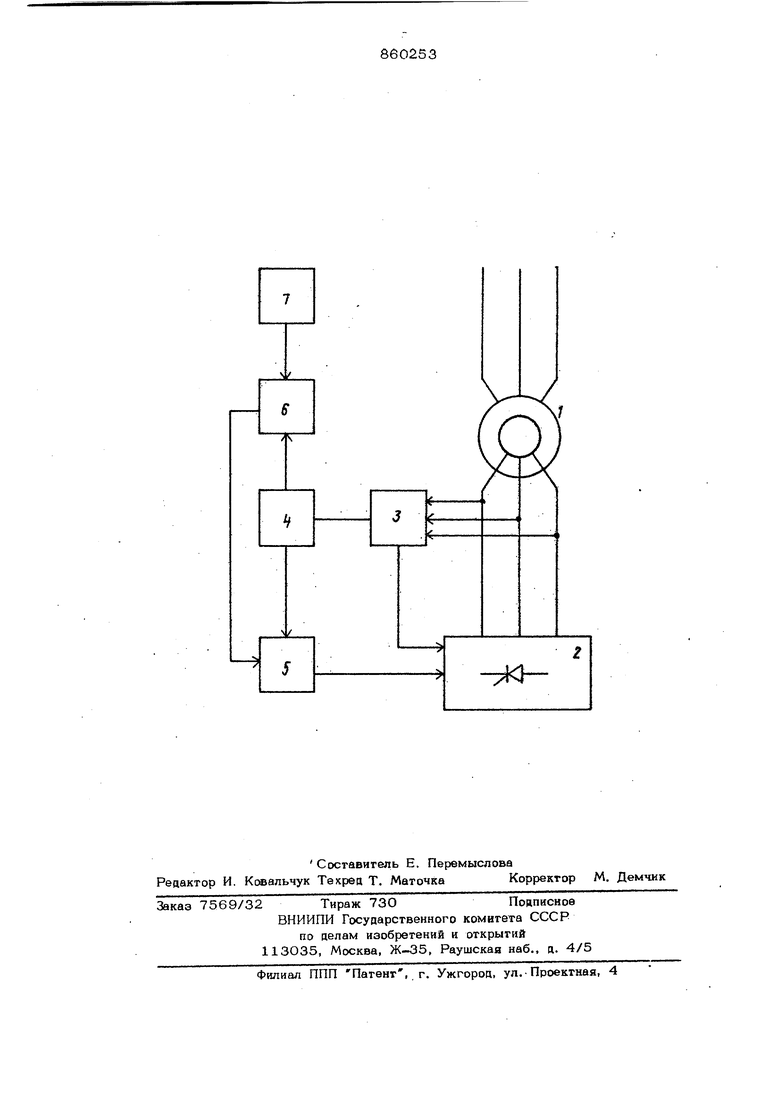
На чертеже показана блок-схема устройства, реализующего предлагаемый способ.
Устройство состоит иа асинхронного двигателя 1, тиристорного коммутатора 2, подключенного к обмотке ротора двигателя 1, ключевого элемента 3, подключенного входом к трем фазам обмотки ро тора, а выходом - к измерителю 4 напряжения, выход которого через второй ключевой элемент 5 соединен с управляющим входом коммутатора 2, блока 6 управления, соединенного с измерителем 4 напря- 20
жения ротора и с зацатчиком 7 момента двигателя 1.
Устройство работает следующим образом.
Напряжение источника питания подаетря на обмотку статора двигателя 1 и с его ротора напряжение поступает на коммутатор 2, тиристоры которого нахо дятся в закрытом состоянии, в связи с чем ключевой элемент 3 включается и соединяет измеритель напряжения 4 с цепью обмотки ротора двигателя 1. В случае превышения измеренного напряжения установлетшй величины, задаваемой вторым ключевым элементом 5, последний включается и подает сигмал напряжения ротора на управляющий электрод того тиристора коммутатора 2, анод которого имеет наибольщий положительный потенциал, что, приводит к включению тиристора и отключению ключевого элемента 3. После окончания процесса коммутации этго тиристора ключевой элемент 3 включается, соединяя цепь ротора двигателя 1 с управляющим электродом следующего коммутируемого тиристора. В момент достижения напряжением ротора заданного значения размыкается ключевой элемент о и отключается коммутатор 2, что привоаит к снижению скорости вращения- цвигателя 1 с постоянным контролем величины напряжения ротора измерителем 4 напряжения. Далее все процессы управления тиристорами коммутатора 2 повторяются.
При необходимости ограничения двигателя 1 по моменту от задатчика 7 момента подается сигнал на вход блока 6 управления, что приводит к задержке сигнала на включение ключевого элемента 5 на заданный угол управления тиристоров коммутатора, обеспечивая необходимую плавность регулирования скорости вращения двигателя.
Таким образом, в предлагаемом способе измеряется напряжение на обмотке ротора только в момент закрытого состояния тиристоров коммутатора, позволяя с высокой точностью, вне зависимости от частоты коммутации и параметров элементов внешней цепи ротора, определить величину этого напрян ения, зависящую от
измеренный сигнал вводить в цепь управляющих электродов тиристоров, что позволяет реализовать указанный способ 6cwiee простыми техническими средствами.
Формула изобретения
Способ управления асинхронным двигателем с тиристорным коммутатором в цепи ротора, заключающийся в том, что подают напряжение питания на -обмотку статора, измеряют напряжение в обмотке ротора и формируют сигнал на включение тиристоров коммутатора, отли чаю - щ и и с я тем, что, с целью упрощения, перед началом коммутации очередного тиристора коммутатора измеренное напряжение в обмотке ротора сравнивают с установленным значением и в случае его превышения измеренный сигнал подают в цепь управляющего электрода тиристора, после чего цепь измерения разрывают, а по окончании коммутации упомянутое напряжение вновь измеряют и подают его на управляющий электрод следующего коммутируемого тиристора.
Источники информации,
принятые во внимание при экспертизе
