1
. Изобретение относится к устройствам, автоматизирующим подачу деталей при различных видах обработки и сборки и может быть использовано в машино- и приборостроении.
Известны манипуляторы, состоящие из рук с захватами 1,
Однако эти манипуляторы Либо имеют сложную систему управления, либо недостаточно универсальны.
Цель изобретения - упростить конструкцию манипулятора и облегчить ег переналадку.
Поставленная цель достигается тем что каждая рука манипулятора снабжена ползуном и шаговымдвигателем, cвязaнны tи 1«1ежду собой винтовой передачей через реверсивную муфту: плечи рук образованы двигателем с угловым редуктором на валу, а программоносители выполнены в виде расположенных на корпусах редукторов электродвигателей, дисков с отверстиями, расположенными в несколько концентри ческих рядов , причем датчики считывания информации расположены на осно вании плеч и предплечий.
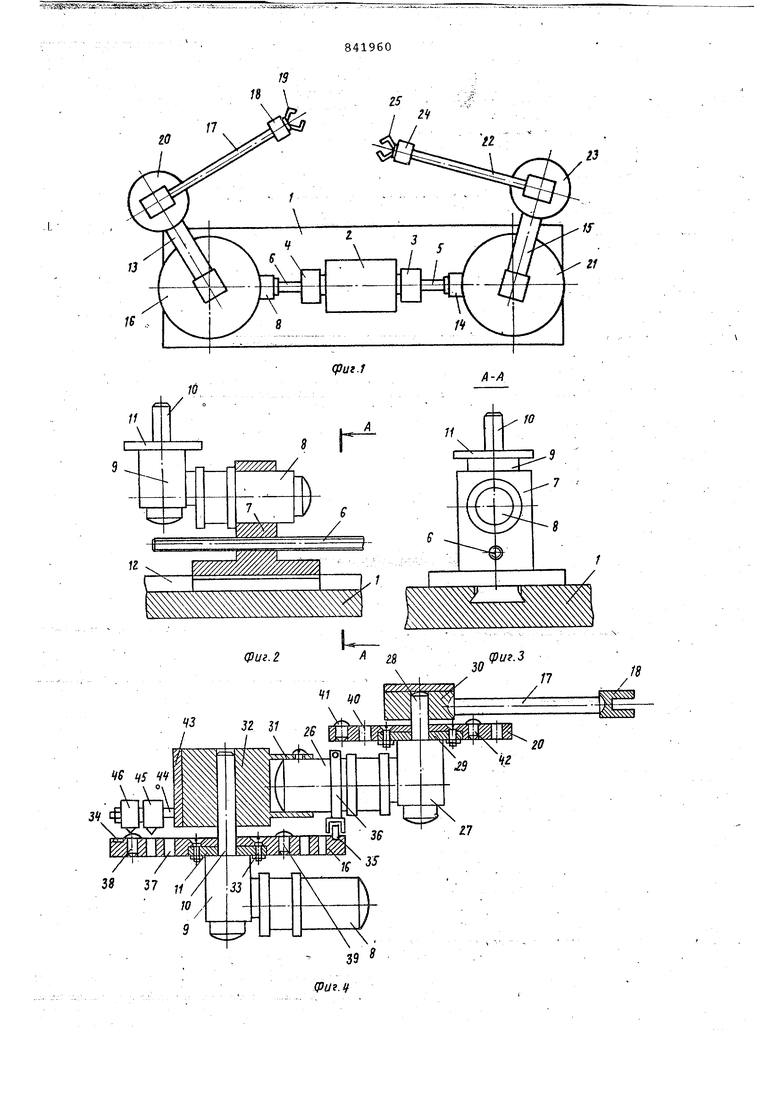
На фиг, 1 показан манипулятор, общий вид сверху) на фиг. 2 - вид ка ретки, несущей редуктор, на котором
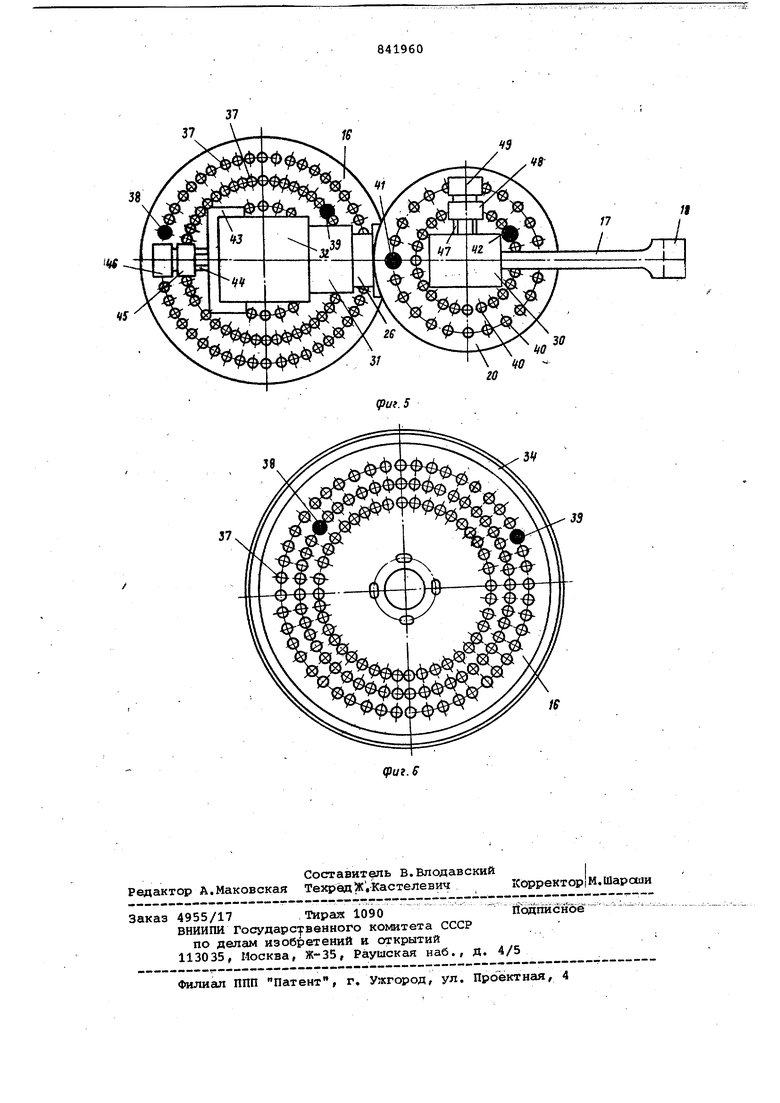
крепится плечо; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - плечо и предплечье, вид сбоку. На фиг. 5 - то же, видсверху; на фиг. 6 - программный диск.
Манипулятор (фиг. 1) смонтирован на основании 1, на котором установлены две руки - правая и левая, а также размещен управляемый шаговый дви0гатель 2, выходы которого соединены с реверсивными управляемыми муфтами 3 и 4. На выходах муфт 3 и 4 имеются винты 5 и 6, которые перемещают руки вправо и влево. Оба винта связаны с
5 ползунами, например, винт 6 (фиг. 2 и 3) с,ползуном 7. Ползун несет регулируемлй двигатель 8, выполненный заодно с угловым редуктором 9, на выходе которого имеется вал 10.
0 К редуктору жестко прикреплена, платформа 11. Ползун 7 может перемещаться вдоль паза 12 по основанию 1 вправо и влево при вращении винта 6.
5
Обе руки имеют совершенно одинаковые органы перемещения по основанию в обе стороны - вправо и влево, Дви.гатель 8 служит для поворотов плеча 13 а двигатель 14 - для поворотов пле0ча 15 правой руки.
В левую руку входит плечо 13, программный диск 16, крепящийся кплатформа 11 (фиг. 4), а также предплечье 17/ в зажиме 18 которого находится захват 19. На плече 13 закреплен программный диск 20.
Аналогично выполнена правая рука, включаквдаг плечо 15, программный диск 21, щ |едплечье 22, программный диск 23, зажим 24 и захват 25.
Платформа 11 СФиг. 4) жестко прикреплена к корпусу редуктора 9, на валу 10 жестко закреплено плечо 13, которое представляет собой двига тель 26 с редуктором 27, заканчивающийся выходным валом 28. К корпусу редуктора 27 жестко прикреплена платформа. 29, на которой укреплен программный диск 20. Предплечье 17 подсоединено к валу 28 посредством головки 30.
Двигатель 26 закреплен жестко во втулке 31, соединенной с головкой 32, которая жестко посажена на вал 10 Программный диск 16 соединен с платформой 11 болтами °33,причем отверстия для крепления в нем выполнены овальными (фиг. 6). Аналогично соединены программный диск 20 и платформа 29.
На поверхности диска 16 имеется круговая канавка 34, по которой катится ролик 35, закрепленный подвижно в хомутике 36, расположенном на двигателе 26. ;
На прогрммном диске 16 имеются отверстия 37, расположенные р несколько рядов по окружностям относительно оси вала 10. В этих отверстиях установлены упоры, например 38 и 39. На программном диске 20 выполнены аналог гичные отверстия 40, в которые также помещаются упоры, например 41 и 42.
,К головке 32 прикреплена скоба 43/ к которой посредством пальцев
44присоединены, микропереключатели
45и 46, расположенные над соседними рядами гнезд 37. Вместо микропереключателя могут быть укреплены другие преобразователи, как контактные, так и бесконтактные. К головке 30 (фиг. 5) прикреплены аналогично посредством пальцев 47 микропереключатели 48 и 49.
Манипуля-вор работает следующим образом (рассматриваем левой руки)i
Включаются двигатели 8 и 26, и плечо 13 с предплечьем 17 начинают разворачиваться, например, оба протий часовой стрелки, выводя захват 19 на исходную, позицию (не показана),Когда захват 19 выйдет на эту позицию, двигатели 8 и 26 отключаются, и рука останавливается. Захват 19 забирает деталь ,1йе показано , зажимает ее, и двигатели 8 и 26 включаются, реверсируясь, поэтому разворот плеча .13 и предплечья 17 идет в «противоположную сторону - по часовой стрелке
841960
Тем самым захват 19 приносит деталь на рабочую,например, сборную позицию (не показана), где останавливается.
В то же время правая рука подводит на сборочную позицию вторую деталь и останавливается. Исполнительный сборочный механизм (не показан) осуществляет рабочую операцию, после его обе руки отводятся на исходные позиции и захватывают очередные дета.ли как описано выше. Возможен и другой вариант работй, Сначала левая рука выносит Деталь на сборочную позицию, где оставляет ее, и движется, поворачиваясь, за следую щей. К сборочной позиции подходит пра вая рука, выносит другую сопрягаемук деталь на сборочную позицию, где размещает ее, и возвращается за следующей деталью. При необходимости обе руки дви кутся еще и вдоль стола основания) 1, для чего включается двигатель и муфты 3. и 4. Это двиххение может быть задано только одной или обеим рукам одновременно, причем как в одну , так и в другую стороны. Такое сочетание движений обеспечивается управляемыгли муфтами. Для выхода; на позицию захвата (исходную позицию;) плечо и предплечье не обязательно должны вращаться только против часово стелки, возможно сочетание вращений разного направления. То же относится и к выходу на сборочную позицию.
Необходимьгй угол разворота как плеча 13, так и пр.едплечья 17 обеспечивается соответствующей установкой грибкообразных упоров 38, 39, 41, 42.Эти упбры,например,упоры 38 и 39, ограничивают угол разворота органов манипулятора, например плечо 13, как в одну, так и в другую сторону. Мик-ропереключатель, например 46, набегая на упор 38, отключает двигатель 8, и плечо 13 перестает: вращаться. Одновременно В1слючается реле времени (не показано), которое обеспечивает выдержку времени, необходимую, например, для захвата детсши. Затем реле времени подключает двигатель 8, одновременно реверсируя его и плечо 13 поворачивается в другую сторону. Микропе15еключатель 45 служит для остановки плеча 13 в другом крайнем положении, для чего используется упор 39,
Аналогично работает двигатель 26, управляемый микропереключателями 48 и 49 в сочетании с упорами 41 и 42. При необходимости повернуть плечо на более мелкий угол, ч.ем это допус-. кает расположение отверстий 37 (фиг.р программный диск 16 поворачивается относительно корпуса редуктора 9 и фиксируется в новом положении болтами 33. Для этого отверстия для крепления диска 16 выполнены овальной формы (фиг. 6).
Электрическая схема включения двигателей, например двигателя 8, может быть несколько иной; после остановки упором 38 двигатель S поворачивает плечо 13 в ту же сторонуi что и раньше, на требуемый угол. Таким образом, руки манипулятора могут совершать по несколько поворотов в одн и ту же сторону, для чего нужно ввес ти соответствукецее число упоров, подобных упору 33, и перекомпановать электросхему включения двигателей. --. Программные диски, например диск 16 (фиг. 6) , не обязательно должны быть сплошными. Они могут быть образ ваны рядом концентрических колец, составленных . вместе и образующих диск (или барабан). На этих кольцах размещаются программоносители (например, отберстия и упоры 38, 39 и другие), Кольца могут смещаться относительно друг друга и фиксироватьс в любых положениях. Такое выполнение диска упрощает и облегчает набор ну; ной nporpaw-w работы манипулятора. Переналадка манипулятора на другой режим работы осуществляется относительно быстро. Для этого переставляются упоры 38, 39 и другие, а в некоторых случаях изменяется положение программных дисков относитель.но корпусов редукторов. В качестве органов переключения и остановки двигателей 8, 26 и других не обязательно применять микропереключатели 45, 46 и другие. Для этой цели могут быть использованы, например, бесконтактные преобразователи, такие как пневматические (типа сопло-заслонка, струйные, золотниковые и другие) , оптические, индуктивные, автогенераторные ит.д. Программные диски, например диск 16, могут быть сменными. Диски 16 и 21, кроме того выполняют роль поддержки для плеч 13 и 15, которые своими роликами, например роликом 35 (фиг. 4), опираютс на дорожку 34 диска, что обеспечивает им лучшую устойчивость. Пели вместо упоров на программных дисках расположить кольцевые потенциометры, ползунки которых укреплены на вращаквдихся головках, например на головке 32 (вместо переключателей), то тогда можно непрерывно контролировать обработку заданных поворотов и корректировать их в случае необходимости . Формула изобретения 1ь Манипулятор, преимущественно для сборочных работ, состоящий из рук с захватами и- расположенных на их звеньях программоносителей и датчиkoB считывания:, отличающийс я тем, что, С целью упрощения конструкции и облегчения переналадки, каждая рука снабжена ползуном и шаговым двигателем/ связанными собой винтовоЛ передачей через реверси в ную му фту, плечи ру к обр аз ов а ны дйи ателем с угловым редуктором на валу, а программоносители выполнены в виде расположенных на корпусах редукторов электродвигателей, дисков с отверстиями, расположенными в нескольких концентрических рядах, причем датчики считывания информации расположены на основании плеч и пред- . плечий. 2. Манипулятор по п. 1, отличающий ся тем, что программные диски образованы кольцами, имеющими возможность поворота одно относительно другого. 3. Манипулятор по пп. 1 и 2, отличающийся тем, что программные диски служат опорами для подвижных звеньев манипулятора. 4. Манипулятор по п. 1-3, отличающийся тем, что на программных дисках установлены кольцевые потенциометры. , Источники информации, принятые во внимание при экспертизе 1. Дистанционно управляемые роботы манипуляторы. М., Мир, 1976, с.66.
(риг.1
10
841960
А-А
fO
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Устройство для автоматической сборки деталей | 1981 |
|
SU1007897A1 |
| СТАНОК-АВТОМАТ ДЛЯ НАПЛАВКИ ПОЯСКОВ ПА ТРУБНЫЕЗАГОТОВКИ | 1968 |
|
SU231687A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Автомат для сборки деталей | 1989 |
|
SU1639936A1 |
| Устройство для групповой сборки легкодеформируемых деталей | 1985 |
|
SU1255355A1 |
| Станок для шлифования деталей | 1987 |
|
SU1713426A3 |
| Манипулятор | 1984 |
|
SU1333567A1 |
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
17
3V
IS II I
