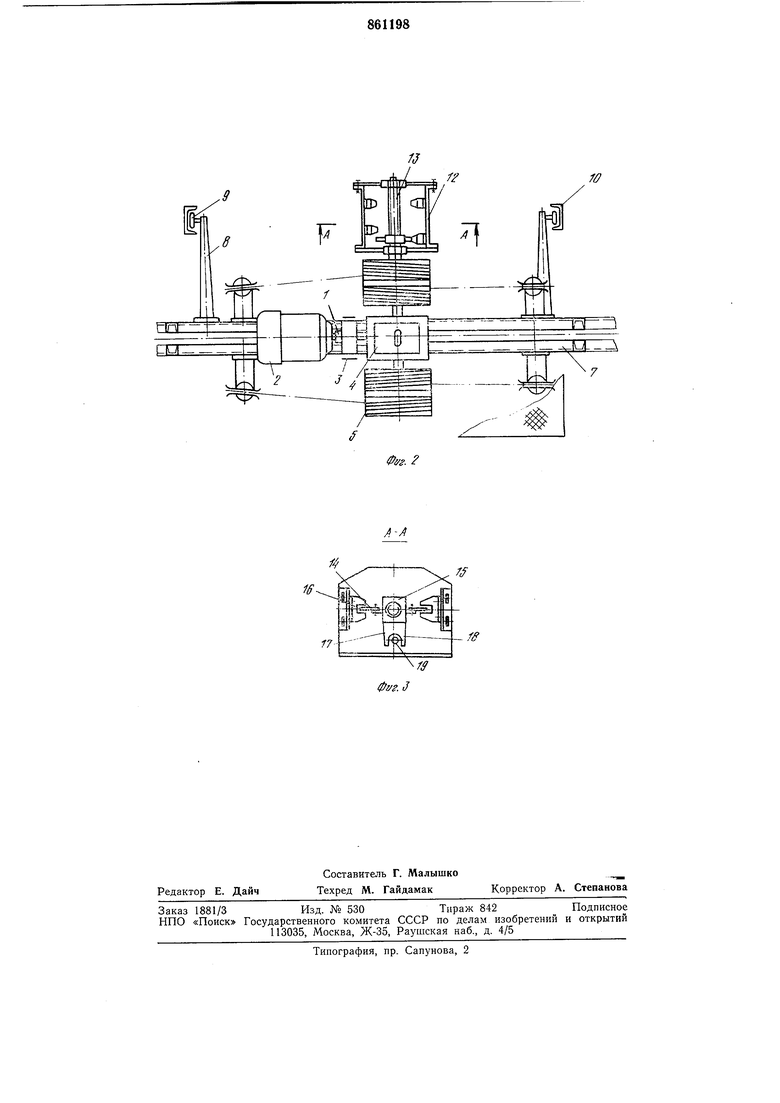
ры 13, а конечные переключатели 16 установлены на ее корпусе 12. Для исключения вращательного движения подвижное звено 15 посредством кронштейна 17 с пазом 18, открытым с одного конца, фиксируется на штанге 19.
Опускная секция работает следуюш,им образом.
Подвижный участок 7 находится в верхнем ноложении, грузовой иуть замкиут, опускная секция готова принять грузовую тележку. Исходное положение механизмов контролируется соответствующим конечным переключателем 16 посредством датчика 14 положения.
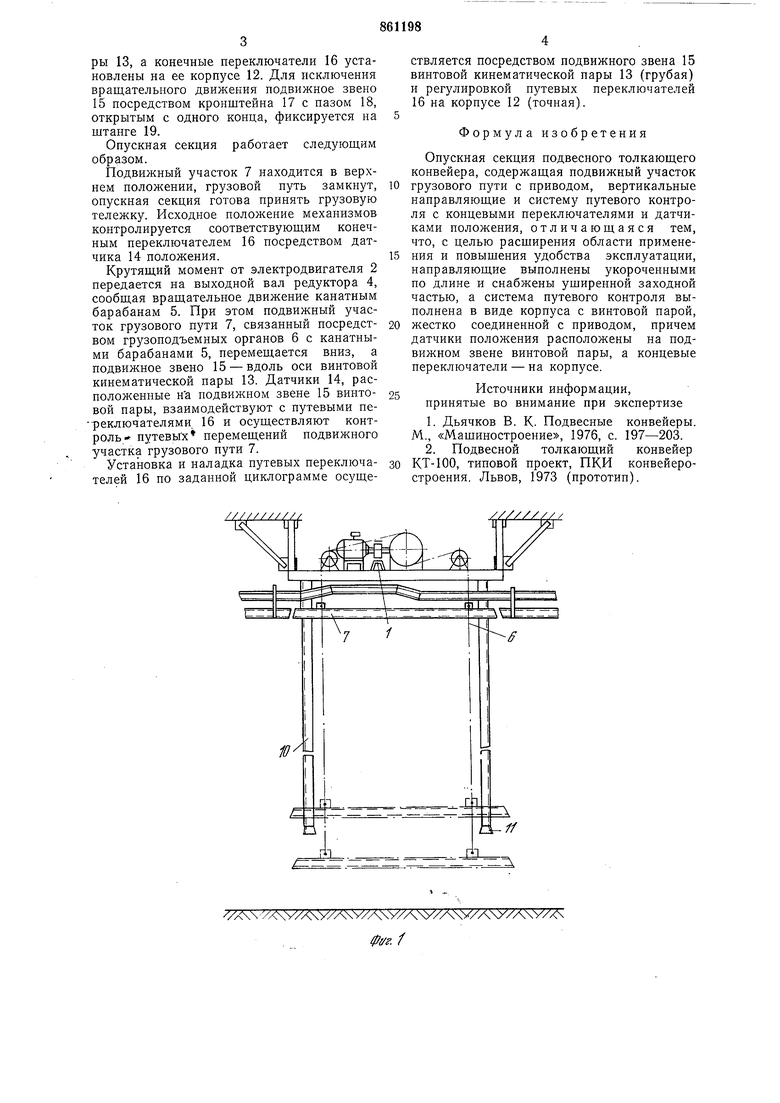
Крутящий момент от электродвигателя 2 передается на выходной вал редуктора 4, сообщая вращательное движение канатным барабанам 5. При этом подвижный участок грузового пути 7, связанный посредством грузоподъемных органов 6 с канатными барабанами 5, перемещается вниз, а подвижное звено 15 - вдоль оси винтовой кинематической пары 13. Датчики 14, расположенные на подвижном звене 15 винтовой пары, взаимодействуют с путевыми переключателями. 16 и осуществляют контроль- путевых перемещений подвижного участка грузового пути 7.
Установка и наладка путевых переключателей 16 по заданной циклограмме осуществляется посредством подвижного звена 15 винтовой кинематической пары 13 (грубая) и регулировкой путевых переключателей 16 на корпусе 12 (точная).
Формула изобретения
Опускная секция подвесного толкающего конвейера, содержащая подвижный участок
грузового пути с приводом, вертикальные направляющие и систему путевого контроля с концевыми переключателями и датчиками положения, отличающаяся тем, что, с целью расширения области применения и повышения удобства эксплуатации, направляющие выполнены укороченными по длине и снабжены уширенной заходной частью, а система путевого контроля выполнена в виде корпуса с винтовой парой, жестко соединенной с приводом, причем датчики положения расположены на подвижном звене виитовой пары, а концевые переключатели - на корпусе.
Источники информации, принятые во внимание при экспертизе
1.Дьячков В. К. Подвесные конвейеры. М., «Машиностроение, 1976, с. 197-203.
2.Подвесной толкающий конвейер КТ-100, типовой проект, ПКИ конвейеростроения. Львов, 1973 (прототип).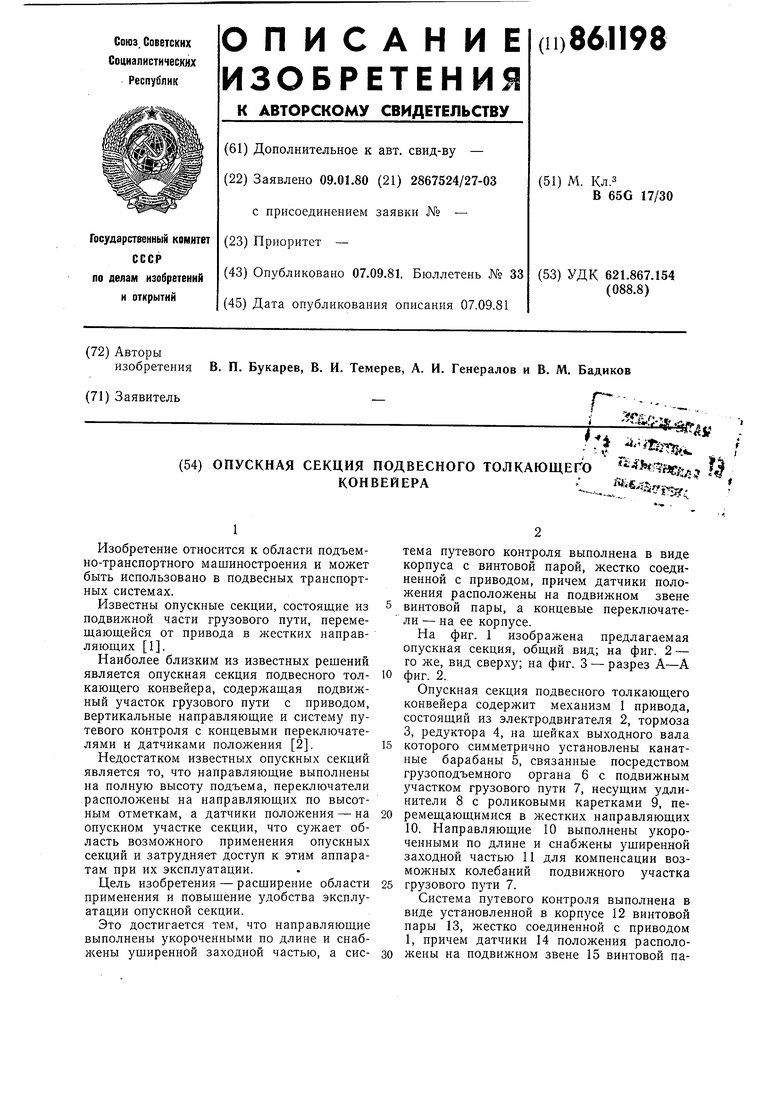
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Телескопический ленточный конвейер | 1986 |
|
SU1407861A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2001 |
|
RU2198831C2 |
| Установка для нанесения покрытия на наружные поверхности полых изделий | 1983 |
|
SU1123740A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| МАШИНА ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2000 |
|
RU2188146C2 |
| Устройство автоматической регулировки глубины обмолота для зерноуборочного комбайна | 1979 |
|
SU1003736A3 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| ВЫПОЛНЕННЫЙ В ВИДЕ МОДУЛЯ СИЛОВОЙ ВСПОМОГАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ СОЗДАНИЯ ЗАВИСЯЩЕГО ОТ НАГРУЗКИ ВСПОМОГАТЕЛЬНОГО УСИЛИЯ | 2003 |
|
RU2298510C2 |
I
ff фуг. /
70
