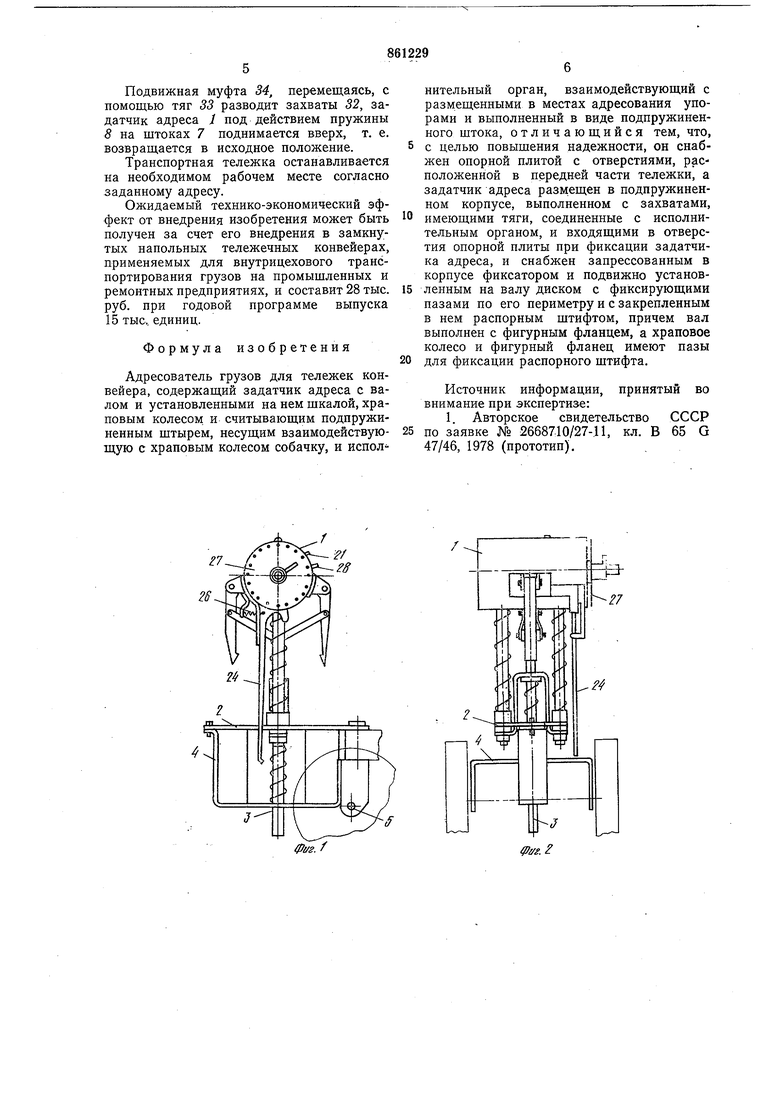
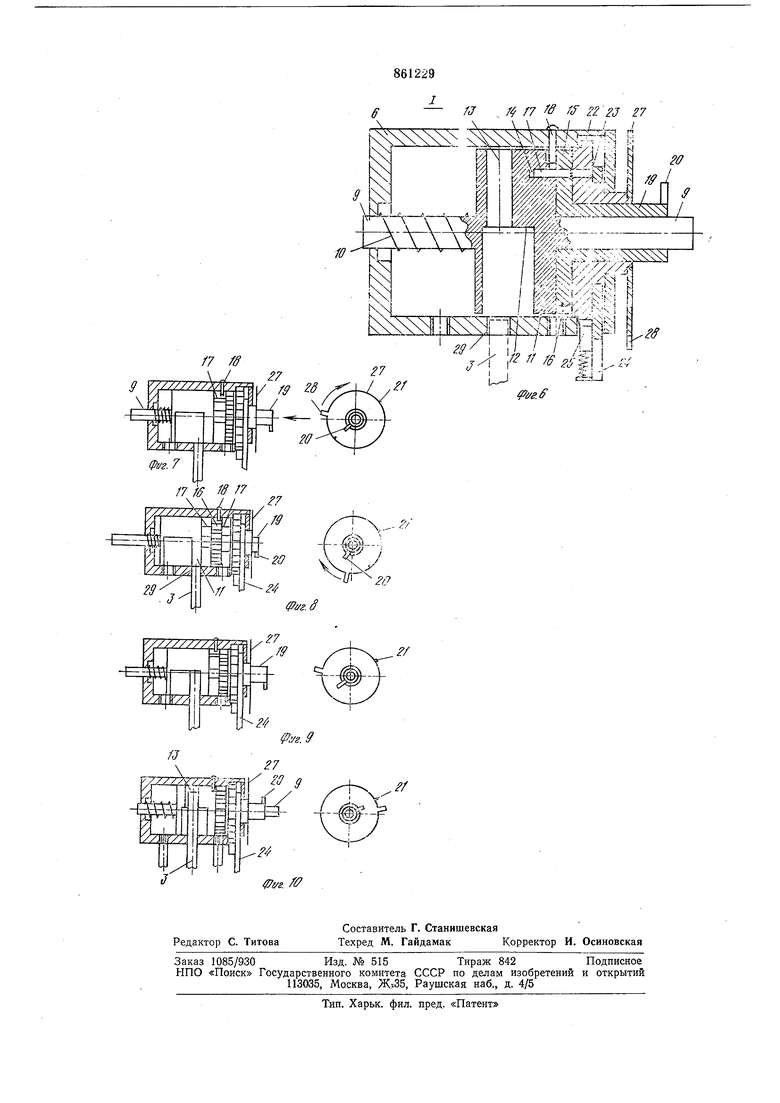
На валу 9 расположен диск 15, снабженный по периметру фиксирующими пазами 16 и запрессованным в него распорным штифтом /7. В корпусе 6 запрессован фиксатор 1в.
На ступице 19 диска 15 закреплен указатель 20, а на корпусе 6 нанесена риска 21 начала отсчета адреса.
Храповое колесо 22 расположено на ступице 19 и имеет отверстие 23, в которое входит распорный штифт 17.
На храповом колесе установлен считывающий щтырь 24, снабженный подпружиненной собачкой 25 и возвратной пружиной 26, а также закреплена щкала 27 с рукояткой 28.
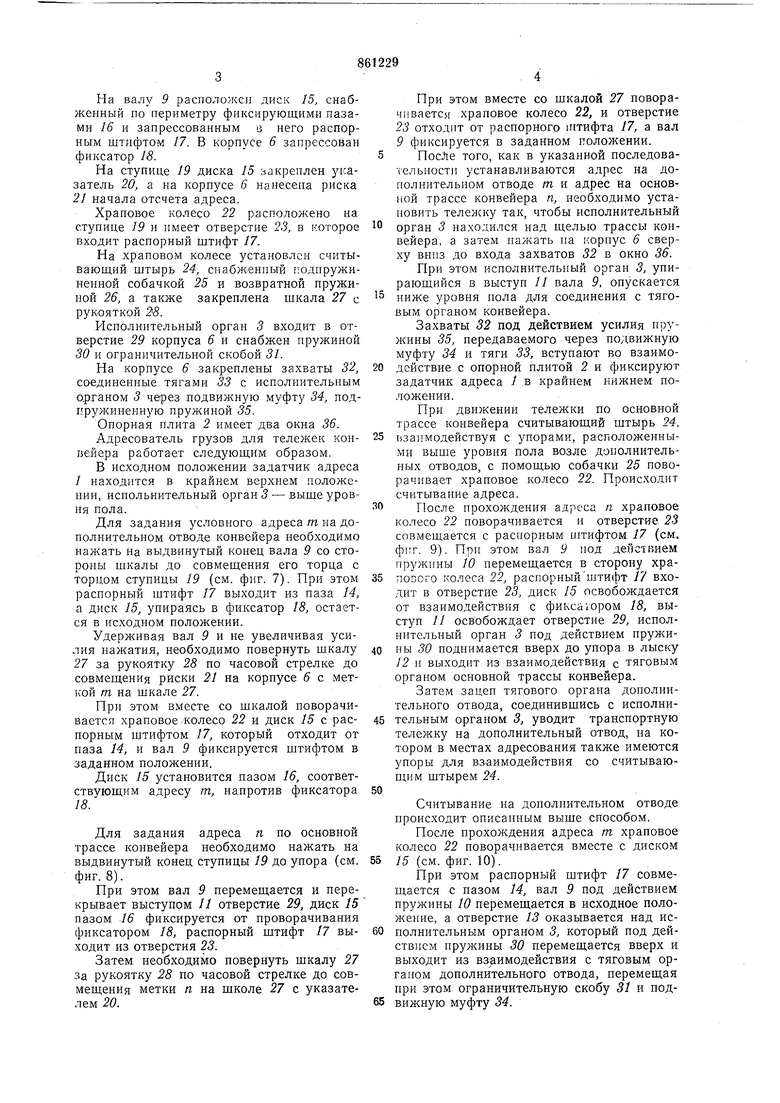
Исполнительный орган 3 входит в отверстие 29 корпуса 6 и снабжен пружиной 30 и ограничительной скобой 31.
На корпусе 6 закреплены захваты 32, соединенные тягами 33 с исполнительным органом 3 через подвижную муфту 34, подгфужиненную пружиной 35.
Опорная плита 2 имеет два окна 36.
Адресователь грузов для тележек конвейера работает следующим образом.
В исходном пололсении задатчик адреса / находится в крайнем верхнем положении, иснольнительный орган 5 - выще уровня пола.
Для задания условного адреса т на дополнительном отводе конвейера необходимо нажать на выдвинутый конец вала 9 со стороны щкалы до совмещения его торца с торцом ступицы 19 (см. фиг. 7). При этом распорный щтифт 17 выходит из паза 14, а диск 15, упираясь в фиксатор 18, остается в исходном положении.
Удерживая вал 9 и не увеличивая усилия нажатия, необходимо повернуть щкалу 27 за рукоятку 28 по часовой стрелке до совмещения риски 21 на корпусе 6 с меткой т на шкале 27.
При этом вместе со шкалой поворачивается храповое колесо 22 и диск 15 с распорным штифтом 17, который отходит от паза 14, и вал 9 фиксируется щтифтом в заданном положении.
Диск 15 установится пазом 16, соответствующим адресу т, напротив фиксатора 18.
Для задания адреса п по основной трассе конвейера необходимо нажать на выдвинутый конец ступицы J9 до упора (см. фиг. 8).
При этом вал 9 перемещается и перекрывает выступом 11 отверстие 29, диск 15 пазом 16 фиксируется от проворачивания фиксатором 18, распорный штифт /7 выходит из отверстия 23.
Затем необходимо повернуть щкалу 27 за рукоятку 28 по часовой стрелке до совмещения метки п на щколе 27 с указателем 20.
При этом вместе со щкалой 27 поворачивается храповое колесо 22, и отверстие 23 отходит от распорного 1итифта 17, а вал 9 фиксируется в заданном положении. 5 ПосЛе того, как в указанной последовательности устанавливаются адрес на дополнительном отводе т и адрес на основной трассе конвейера п, необходимо установить тележку так, чтобы исполнительный
0 орган 3 находился над щелью трассы конвейера, а затем нажать па корпус 6 сверху внпз до входа захватов 32 в окно 36.
При этом исполнительный орган 3, упирающийся в выступ 11 вала 9, опускается
15 ниже уровня пола для соединения с тяговым органом конвейера.
Захваты 32 под действием усилия нружины 35, передаваемого через подвижную муфту 34 и тяги 33, вступают во взаимодействие с опорной плитой 2 и фиксируют задатчик адреса 1 .в крайнем нижнем положении.
При движении тележки по основной трассе конвейера считывающий щтырь 24,
5 взаимодействуя с упорами, расположенными выше уровня пола возле дополнительных отводов, с помощью собачки 25 поворачивает храповое колесо 22. Происходит считывание адреса.
0 После прохождения адреса п храповое колесо 22 поворачивается и отверстие 23 совмещается с распорным штифтом 17 (см. фкг. 9). При этом вал 9 под действием пружины 10 перемещается в сторону хра5 нового колеса 22, распорныйшти(|)т Г/ входит в отверстие 23, диск 15 освобождается от взаимодействия с фиксатором 18, выступ // освобождает отверстие 29, исполнительный орган 3 под действием нрунси0 ны 30 ноднимается вверх до упора в лыску 12 и выходит из взаимодействия с тяговым органом основной трассы конвейера.
Затем зацеп тягового органа дополнительного отвода, соединивщись с исполнительным органом 5, уводит транспортную тележку на дополнительный отвод, на котором в местах адресования также имеются упоры для вз-аимодействия со считывающим щтырем 24.
Считывание на донолнительном отводе происходит описанным выще способом.
После прохождения адреса т храповое колесо 22 поворачивается вместе с диском
/5 (см. фиг. 10).
При этом распорный штифт 17 совмещается с пазом 14, вал 9 под действием пружины 10 перемещается в исходное положение, а отверстие 13 оказывается над исполнительным органом 3, который под действием 30 перемещается вверх и выходит из взаимодействия с тяговым органом дополнительного отвода, перемещая при этом ограничительную скобу 31 и под5 вижную муфту 34. Подвижная муфта 34, перемещаясь, с помощью тяг 33 разводит захваты 32, задатчик адреса J под действием пружины 8 на штоках 7 поднимается вверх, т. е. возвращается в исходное положение. Транспортная тележка останавливается на необходимом рабочем месте согласие заданному адресу. Ожидаемый технико-экономический эффект от внедрения изобретения может быть получен за счет его внедрения в замкнутых напольных тележечных конвейерах, применяемых для внутрицехового транспортирования грузов на промышленных и ремонтных предприятиях, и составит 28 тыс. руб. при годовой программе выпуска 15 тыс., единиц. Формула изобретения Адресователь грузов для тележек конвейера, содержащий задатчик адреса с валом и установленными на нем шкалой, храповым колесом, и считывающим подпружиненным штырем, несущим взаимодействующую с храповым колесом собачку, и испол нительный орган, взаимодействующий с размещенными в местах адресования упорами и выполненный в виде подпружиненного штока, отличающийся тем, что, с целью повышения надежности, он снабжен опорной плитой с отверстиями, расположенной в передней части тележки, а задатчик адреса размещен в подпружиненном корпусе, выполненном с захватами, имеющими тяги, соединенные с исполнительным органом, и входящими в отверстия опорной плиты при фиксации задатчика адреса, и снабжен запрессованным в корпусе фиксатором и подвижно установленным на валу диском с фиксирующими пазами по его периметру и с закрепленным в нем распорным штифтом, причем вал вьшолиен с фигурным фланцем, а храповое колесо и фигурный фланец имеют пазы для фиксации распорного штифта. Источник информации, принятый во внимание при экспертизе: 1. Авторское свидетельство СССР по заявке № 2668710/27-.11, кл. В 65 G 47/46, 1978 (прототип).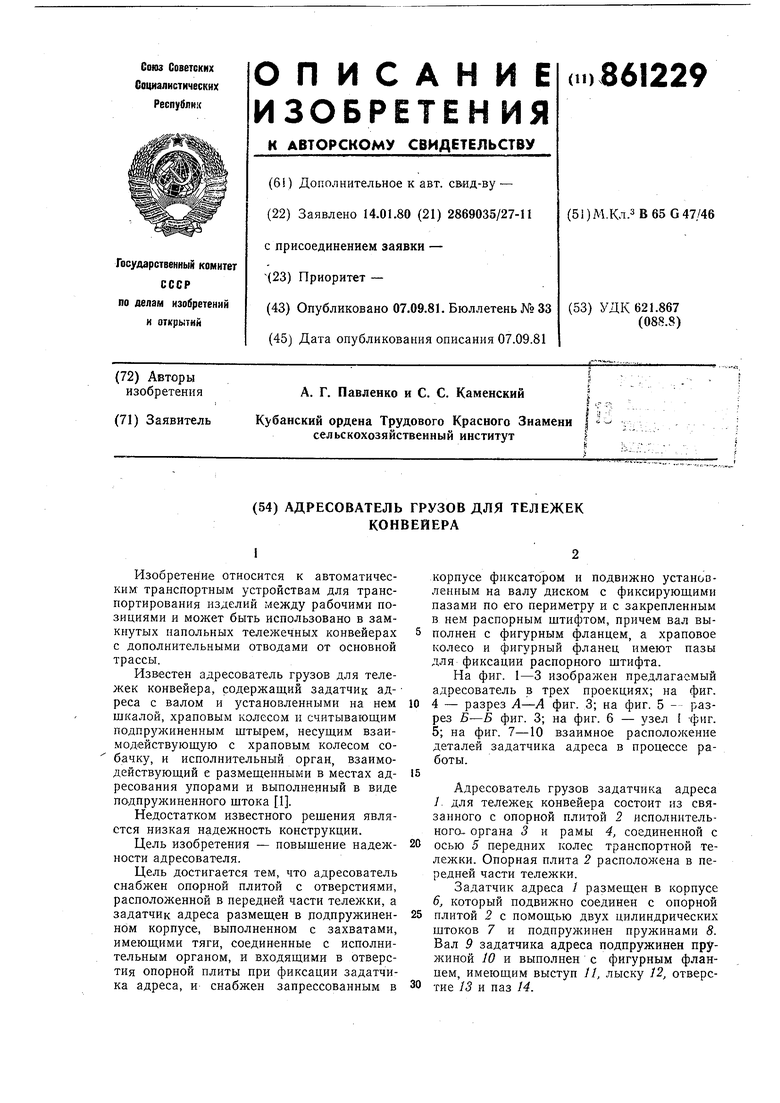
| название | год | авторы | номер документа |
|---|---|---|---|
| Адресователь грузов | 1978 |
|
SU743922A1 |
| Адресное устройство грузовых тележек напольного конвейера | 1973 |
|
SU522108A1 |
| Напольный конвейер | 1976 |
|
SU787301A2 |
| Адресователь грузов | 1970 |
|
SU468849A1 |
| Устройство для автоматического адресования деталей на конвейере | 1979 |
|
SU870294A1 |
| АДРЕСОВАТЕЛЬ ГРУЗОВ ПОДЪЕМНИКОВ';«;дтечтно-тох;-;^чо>& ,..-Ji!?^jiK:bT>&?HmMF:, | 1969 |
|
SU249277A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО | 1972 |
|
SU326554A1 |
| Адресователь для грузов | 1983 |
|
SU1146261A1 |
| Напольный конвейер | 1976 |
|
SU682430A1 |
| Механический адресователь изделий | 1972 |
|
SU485929A1 |
7
уг. /
/-J
а Б
Т
/1-А
1/г.
S-S 7J /7 fS f PfP7ff
.
