(54) СИСТЕМА СИНХРОНИЗАЩШ СКОРОСТИ ДВИЖЕНИЯ УБОРОЧНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система синхронизации скорости движения уборочного сельскохозяйственного агрегата | 1980 |
|
SU938782A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
| САМОХОДНОЕ ШАССИ ДЛЯ АГРЕГАТИРОВАНИЯ ФРОНТАЛЬНЫХ УБОРОЧНЫХ МАШИН | 2006 |
|
RU2305386C1 |
| АВТОМАТИЧЕСКИЙ КОРРЕКТОР ВЫСОТЫ ТЕРЕБЛЕНИЯ ЛЬНА ЛЬНОУБОРОЧНОЙ МАШИНЫ | 1969 |
|
SU255688A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО | 1966 |
|
SU214186A1 |
| Устройство для синхронизации движения тележек многоопорной дождевальной машины | 1982 |
|
SU1093302A1 |
| МАШИНА ДЛЯ СНЯТИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИКМАТЕРИАЛОВ | 1964 |
|
SU166524A1 |
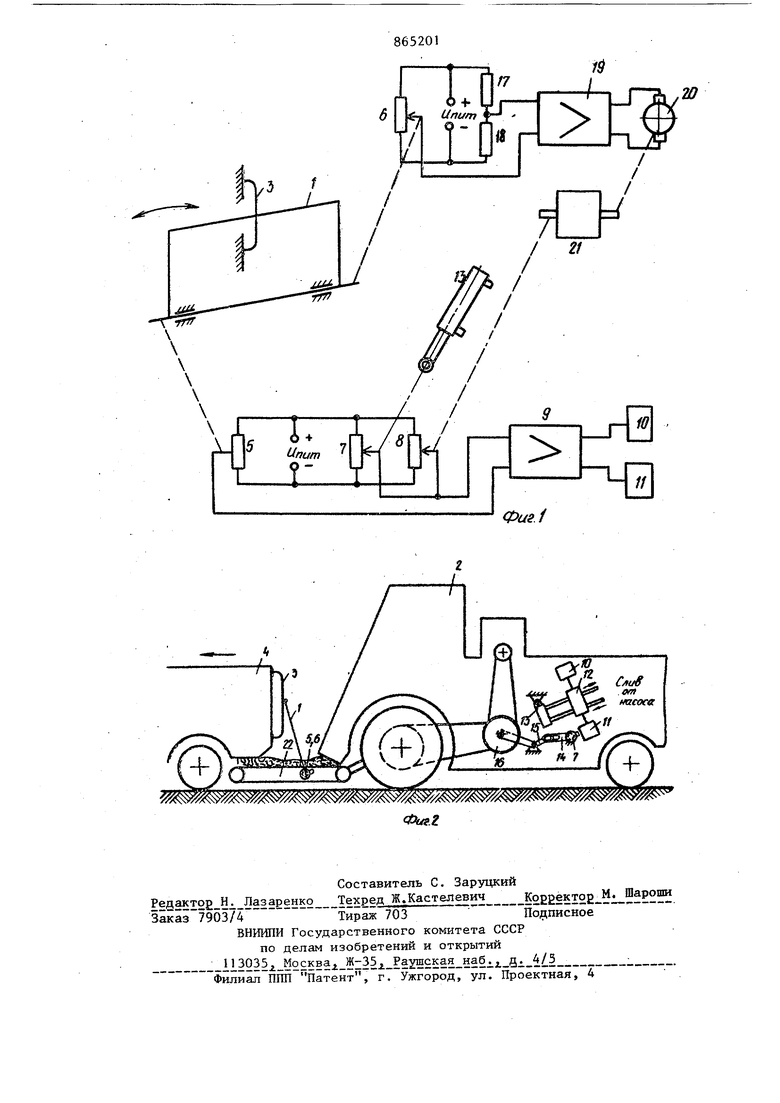
Изобретение относится к сельскоохозяйственному машиностроению, а имен но к конструкции систем синхронизации скорости движения уборочного сельскохрзяйственного агрегата, и может быть использовано при испытании самоходных сельскохозяйственных уборочных машин для автоматического управления скоростью самоходного пробоотборника без значительного силового влияния на испытуемую машину. Известна система синхронизации ско рости движения уборочного сельскохозяйственного агрегата, включающая следящий рычаг, датчик расстояния,, датчик обратной связи, электронный усилитель и исполнительное устройство гп. Недостатком этой системы синхрони зации является то, что она не позвол ет сохранить неизменным расстояние между машинами агрегата при разных скоростях движения, что приводит к н которым потерям убираемой массы в процессе работы и, в .конечном счете, к ошибкам при отборе проб, характери-j зующих качество работы испытуемого устройства.. Цель изобретения - уменьшение потерь собираемой массы и сокращение времени на дополнительную регулировку системы синхронизации скорости движения агрегата. Указанная .цель достигается тем, что система синхронизации снабжена мостовой схемой с потенциометрическим датчиком подстройки, потенциометром, включенным параллельно датчику расстояния, и электродвигателем с редуктором, которьш связан с движком потенциометра. На фиг. 1 изображена структурная схема системы синхронизации движения, на фиг. 2 - общий вид уборочного сельскохозяйственного агрегата. Система синхронизации включает следящий рычаг 1 пробоотборника 2, взаимодействующий свободным концом с упором 3 испытываемой машины 4, оси потенциометров датчика расстояний 5 и датчика подстройки 6 связаны с валом следящего рычага 1. Потенциометр обратной связи 7 и потенциометр подстройки системы 8 соединены параллел но и совместно с датчиком расстояний образуют электрический мост, выход которого подкл10чен к входу электронного усилителя 9. Выход усилителя 9 нагружен управляющими обмотками элек ромагнитов 10 и II гидрораспределителя 12, подключенного к гидроцилинд ру 13, которьш связан через систему рычагов 14 и 15 с вариатором скороети 16 и потенциометром обратной связи 7. Схема подстройки системы синхронизации состоит из электрического моста, включающего потенциометр-датчик подстройки 6 и резисторы 17 и 18 электронного усилителя 19 и реверсив ного электродвигателя 20, соединенно го через понижающий редуктор 21с осью потенциометра подстройки 8, включенного параллельно потенциометру обратной связи 7. Транспортер 22 про боотборника 2 агрегата расположен под выгрузным окном испытуемой уборочной машины 4. Система синхронизации скорости дв жения работает следующим образом. Во время движения самоходного про боотборника 2 за испытываемой уборочной мапп-1Ной 4 упор 3 воздействует на следящий рычаг 1 и поворачивает ось потенциометра 5, баланс электрич к&го моста 5, 7 и 8 нарушается, на входе усилителя 9 появляется управляющий сигнал, приводящий, в конечно счете, к перемещению штока гидроцилиндра 13 в сторону уменьшения скорости, если -скорость самоходного про боотборника 2 выше скорости испытуемой машины 4 и в сторону увеличения если скорость пробоотборника 2 ниже скорости машины 4. При этом датчик обратной связи, соединенньш со штоком гидроцилиндра 13, возвращает мост 5, 7 и 8 в со стояние баланса, управляющий сигнал отсутствует, движение штока гидроциливдра 13 прекращается. Если изменение скорости оказалось недостаточным то происходит еще один или несколько циклов, работы системы до полного согласования скоростей. Однако при уве личении скорости движения агрегата следящий рычаг 1 отклоняется на некоторьй угол по направлению его движения, так как его положение определяется положением штока гидроцилиндра 13, управляющего вариатором 16. При этом движение пробоотборника 2 и машины 4 оказывается синхронньм, но расстояние между ними увеличивается. Таким образом, чем больше скорость движения агрегата, -тем больше дистанция между его машинами. Этот недостаток устраняется схемой подстройки системы. При отклонении следящего рычага 1 от оптимального положения нарушается балансировка моста 6, 17 и 18, сигнал рассогласования через усилитель 19 подается на реверсивнью электродвигатель 20, связанньм через редуктор 21 с потенциометром подстройки системы 8. Вводится рассогласование в управляющий мост 5, 7 и 8, по описанной выше схеме происходит отработка сигнала рассогласования до восстановления оптимального расстояния между машинами агрегата. Применение данногоустройства позволяет сократить потери собираемой массы и тем самым значительно повысить точность при отборе проб убираемой испытуемым устройством массы, одновременно сокращается технологическое время на подготовку системы к работе. Формула изобретения Система синхронизации скорости двилсения уборочного сельскохозяйственного агрегата, включающая следящий, рычаг, датчик расстояния, датчик обратной связи, электронный усилитель и исполнительное устройство, о т л и чающаяся тем, что, с целью уменьшения потерь собираемой массы и сокращения времени на дополнительное регулирование системы синхронизации, последняя снабжена мостовой схемой с потенциометрическим датчиком, потенциометром, включенным параллельно датчику расстояния, и электродвигателем с редуктором, который связан с движком потенциометра. Источники информации, принятые во внимание при экспертизе 1. Отчет Кубанского научно-исследовательского института испытания тракторов и сельскохозяйственных машин. № 396-74, 1974 (прототип).
