1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического управления скоростью Движения зерноуборочных агрегатов и может быть использовано при их испытании.
Известна система синхронизации скорости движения уборочного сельскохозяйственного агрегата, содержащая следящий рычаг, датчик расстояния датчик обратной связи, усилители, золотниковый распределитель с электромагнитным управлением и соловый гидроцилиндр 1.
Недостаток известного устройства заключается в том, что оно не позволяет с достаточной точностью сохранять неизменным расстояние между машинами агрегата при изменении скорости одной из них, в связи с чем происходят потери убираемой массы.
Цель изобретения - уменьшить потери собираемой массы путем повышения качества работы системы синхронизации, скорости движения уборочного сельскохозяйственного агрегата.
Поставленная цель достигается за счет того, что система синхронизации агрегата снабжена сумматорами, компараторами
и устройством изменения глубины обратной связи, причем устройство изменения глубины обратной связи выполнено в виде, преобразователя напряжения рассогласования в сопротивление, а выход датчика
5 расстояния соединен с одним из электромагнитов золотникового распределителя силового гидроцилиндра через усилитель управляющего сигнала, первый вход первого сумматора, инвертирующий вход первого компаратора, который соединен с неинвертирующим входом второго компаратора, и выходной усилитель - с вторым электромагнитом золотникового распределителя силового гидроцилиндра, выход датчика расстояния соединен через дифференциатор,
15 первый вход второго сумматора, который соединен с вторым входом первого сумматора, инвертирующий вход второго ко.мпаратора, который соединен с неинвертирующим входом первого компаратора, и выходной усилитель, и, кроме того, соединен со
20 вхрдом устройства изменения обратной связи, один выход которого подключен к второму входу второго сумматора, а его другой выход и выход датчика обратной связи соединены с входом усилителя обратной связи, выход которого соединен с вторым входом второго сумматора.
Кроме того устройство изменения глубины обратной связи снабжено усилителями с инвертирующим и неинвертирующим входами, диодами, задатчиком напряжения смещения, сумматором, устройством гальванической развязки и полевыми транзисторами, причем выход датчика расстояний соединен с инвертирующим и неинвертирующими входами усилителей, их выходы через диоды - с входом сумматора, третий вход которого связан .с выходом задачтика напряжения смещения, а выход сумматора через устройство гальванической развязки подключен к затворам полевых транзисторов, включенных встречно.
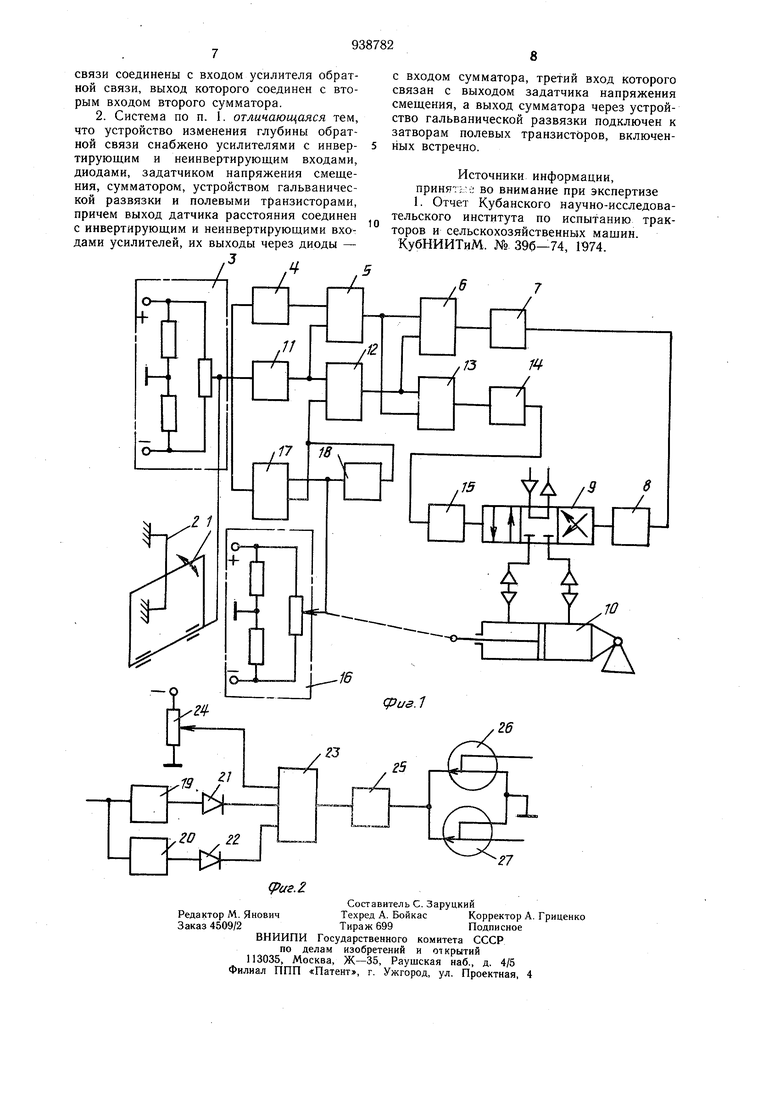
На фиг. 1 изображена функциональная электрическая схема системы синхронизации скорости движения уборочного сельскохозяйственного агрегата; на фиг. 2 - функциональная схема устройства изменения глубины обратной связи.
Система синхронизации скорости движения уборочного сельскохозяйственного агрегата содержит следящий, рычаг 1, взаимодействующий с упором 2 и связанный с датчиком 3 расстояния, выход которого через усилитель 4 управляющего сигнала, первый сумматор 5, первый компаратор 6, выходной усилитель 7 подключен к электромагниту 8 золотникового распределителя 9 силового гидроцилиндра 10; выход датчика расстояния 3 соединен также через дифференциатор 11, второй сумматор 12, второй компаратор 13, выходной усилительгЛ4 со вторым электромагнитом 15 золотникового распределителя 9 силового гидроцилиндра 10, щток которого связан с датчиком обратной связи 16; выход дифференциатора И соединен со вторым входом первого сумматора 5, выход первого сумматора 5 соединен со вторым входом второго компаратора 13. а выход второго сумматора 12 соединен со вторым входом первого компаратора 6. Выход датчика расстояния 3 соединен и со входом устройства 17 изменения глубины обратной связи, один выход которого подключен ко второму входу второго сумматора 12, а другой его выход и выход датчика 16 обратной связи соединены с входом усилителя 18 обратной связи, выход которого соединен со вторым входом второго сумматора 12. Устройство 17 изменения глубины обратной связи содержит усилители с инвертирующим 19 и неинвертирующим 20 входами, соединенными с датчиком 3 расстояния, выходы которых, через диоды 21 и 22 соответственно подключены ко входам сумматора 23, третий вход которого соединен с задатчиком 24 напряжения смещения. Выход сумматора 23 через устройство 25 гальванической развязки соединен с полевыми транзисторами 26 и 27, которые включены встречно.
Система работает следующим образом.
Во время движения уборочного сельскохозяйственного агрегата упор воздействует на следящий рычаг 1, который связан с датчиком 3 расстояния. Рассмотрим работу системы синхронизации скорости, предположив, что расстояние между машинами агрегата остается неизменным. Мосты датчика 3 расстояния и датчика 16 обратной связи сбалансированы.
При отсутствии сигнала рассогласования напряжения на выходах усилителя 4, дифференциатора 11 и сумматоров 5 и 12 компараторы 16 и 13 не срабатывают. Ток через электромагниты 8 и 15 не, протекает и золотник распределителя 9 находится в нейтральном положении. Устройство 17 изменения глубины обратной связи обеспечивает максимальный коэффициент усиления усилителя 18 обратной связи. Следовательно, глубина отрицательной обратной связи, охватывающая систему синхронизации, максимальная.
При превыщении сигналом рассогласования определенного уровня на выходах усилителя 4, дифференциатора 11 появляется напряжение. В зависимости от знака и скорости изменения сигнала рассогласования величина напряжения на выходе усилителя 4 зависит от угла отклонения следящего рычага 1, а на выходе дифференциатора 11 - от знака и величины скорости отклонения следящего рычага 11. Компаратор 6(13) срабатывает и через электромагнит 8(15) протекает ток, электромагнит 8 (15) Срабатывает и перемещает золотник распределителя 9 в одно из крайних положений. Шток гидроцилиндра 10 перемещается и скорость идущей сзади мащины агрегата начинает изменяться. При этом нарущается равновесие моста датчика обратной связи, соединенного со щтоком гидроцилиндра 10, на входе усилителя обратной связи 18 появляется сигнал. Устройство 17 изменения глубины обратной связи обеспечивает коэффициент усиления усилителя 18 обратной связи, пропорциональной величине отклонения следящего рычага 1. Сигнал обратной связи поступает на вход сумматора 12 и вместе с сигналом дифференциатора 11 обеспечивают включение компаратора 6(13). Ток через электромагнит 8(15) прекращается, золотник распределителя 9 возвращается в нейтральное положение. Шток гидроцилиндра 10 перемещается на одну ступеньку, скорость задней мащины агрегата изменяется (уменьщается или увеличивается). Длительность включения золотника распределителя 9 зависит от угла и скорости отклонения следящего рь1чага 1.
Если после отработки системой первого цикла, на входах усилителя 4 и дифференциатора 11 будет сигнал рассогласования, то снова включается компаратор 6(13) и цикл повторяется. Система синхронизации скорости движения работает в импульсном режиме. При значительном отклонении следящего рычага 1, когда скорость впереди идущей машины агрегата резко возрастает или уменьщается на входе компаратора 6(13) появляется включающий сигнал большой амплитуды, при этом устройство 17 изменения глубины обратной связи обеспечивает минимальный коэффициент усиления усилителя 18. Глубина отрицательной обратной связи, охватывающая систему синхронизации, минимальная и величина сигнала с выхода усилителя 18 обратной связи в сумме с сигналом с выхода дифференциатора 11 недостаточна для выключения компаратора 6(13). Ток через электромагнит 8(15) не прекращается, золотник распределителя 9 находится в одном из крайних положений. Шток гидроцилиндра 10 непрерывно перемещается, следовательно, задняя ма щина агрегата с максимальной скоростью догоняет впереди идущую, или остает от нее. При уменьшении сигнала рассогласования система снова переходит в импульснь1Й режим. Таким образом, достигается различная скорость исполнения в зависимости от положения следующего рычага 1, что повышает быстродействие системы синхронизации и качество слежения. Устройство 17 изменения глубины отрицательной обратной связи, зай:сящей от положения следящего рычага 1, работает следующим образом. Сигнал рассогласования с выхода датчика 3 расстояния подается на инвертирующий вход усилителя 19 и на неинвертирующий вход усилителя 20. Выходные сигналы усилителей 19 и 20 проходят через диоды 21 и 22 и подаются на вход сумматора 23. На третий вход сумматора 23 подается постоянное отрицательное напряжение смещения с задатчика 24, которое позволяет устанавливать максимальный угол отклонения следящего рычага .1, при котором система синхронизации работает в импульсном режиме. При отклонении следящего рычага 1 на больщий угол система синхронизации работает в непрерывном режиме. Сигнал с выхода сумматора 23 подается на вход устройства 25 гальванической развязки, с выхода которого сигнал подается на затворы двух встречно включенных полевых транзисторов 26 и 27. При отсутствии сигнала рассогласования с устройства 25 гальванической развязки на затворы полевых транзисторов 26 и 27 подается максимальное положительное напряжение и закрывает их. Между входом и выходом усилителя 18 обратной связи включено больщое сопротивление. Коэффициент усиления этого усилителя максимальный. При наличии сигнала рассогласования между входом и выходом усилителя 18 обратной связи включается меньшее сопротивление. Коэффициент усиления этого усилителя уменьшается. При максимальном отклонении следящего рычага 1, при котором система синхронизации работает в импульсном режиме, между входом и выходом усилителя 18 об. ратной связи включается минимальное сопротивление, определяемое двумя открытыми полевыми транзисторами 26 и 27. Коэффициент усиления этого усилителя минимальный. Итак, величина сопротивления подключаемого между входом и выходом усилителя 18 обратной связи изменяется в зависимости от угла отклонения следящего рычага 1. Применение предлагаемой системы синхронизации скорости движения на уборочном сельскохозяйственном агрегате позволяет значительно сократить потери собираемой массы и повысить производительность агрегата. Формула изобретения 1. Система синхронизации скорости движения уборочного сельскохозяйственного агрегата, содержащая следящий рычаг, датчик расстояния, датчик обратной связи, усилители, золотниковый распределитель с электромагнитным управлением и силовой гидроцилиндр, отличающаяся тем, что, с целью уменьшения потерь собираемой массы путем повышения качества работы, она снабжена сумматорами, компараторами и устройством изменения глубины обратной связи, причем устройство изменения глубины обратной связи выполнено в виде преобразователя напряжения рассогласования в сопротивление, а выход датчика расстояния соединен с одним из электромагнитов золотникового распределителя силового гидроцилиндра через усилитель управляющего сигнала, первый вход первого сумматора, инвертирующий вход первого компаратора, который соединен с неинвертнрующим входом второго компаратора, и выходной усилитель - с вторым электромагнитом золотникового распределителя Силового гидроцилиндра, выход датчика расстояния соединен через дифференциатор, первый вход второго сумматора, который соединен с вторым входом первого сумматора, инвертирующий вход второго компаратора, который соединен с неинвертирующим входом первого компаратора, и выходной усилитель, и, кроме того, соединен с входом устройства изменения глубины обратной связи, один выход которого подключен к второму входу второго сумматора, а его другой выход и выход датчика обратной
| название | год | авторы | номер документа |
|---|---|---|---|
| Система синхронизации скорости движения уборочного сельскохозяйственного агрегата | 1980 |
|
SU865201A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ПОМОЩЬЮ ДВУХ РЫЧАГОВ УПРАВЛЕНИЯ ОТ ОПЕРАТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2025411C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU851335A1 |
| Устройство для автоматического вождения колесного трактора | 1984 |
|
SU1210685A1 |
| СЛЕДЯЩИЙ ПРИВОД | 2007 |
|
RU2361258C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2013 |
|
RU2529965C1 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543360A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Устройство для автоматического направления движения двухпоточного подборщика на ленты льна | 1980 |
|
SU869596A1 |
