теля через редуктор 14 и коническую передачу 15 передается на приводной вал (ПВ) П. С ПВ 11 вращательное движение передается на кулачки 18, 19, которые, взаимодействуя.соответственно с рамками 16, 17, трансформируют вращательное движение ПВ 11 в возвратно-поступательное движение рамок. Движение ПВ 11 передается также профильному кулачку 10 и через подшипник 9 сообщает ползуну возвратно-поступательное движение, вдоль шариковых направляющих. Толкатели 8, Еоздействуя на подюыочающие устройства (ПУ) 3 и подпружиненные корпусные ножевые контакты (ПК) 4, обеспечивают подключение npcBepnei ix реле 3 к блоку управления на время конт
Изобретения относится к электро- аппаратостроешт, а именно к устрой ствам контроля и разбраковки реле по электрическим параметрам, н может быть использовано на предприятиях приборостроения электротехнической промыгшгснпости для автоматической разбраковгаг изделий, в частности миниатюрных и микротщиатюрных реле.
Цель изобретения - повышение надежности в работе и расшфенпе функ- UHouajtbiTbtx возможностей автомата для разбраковки реле.
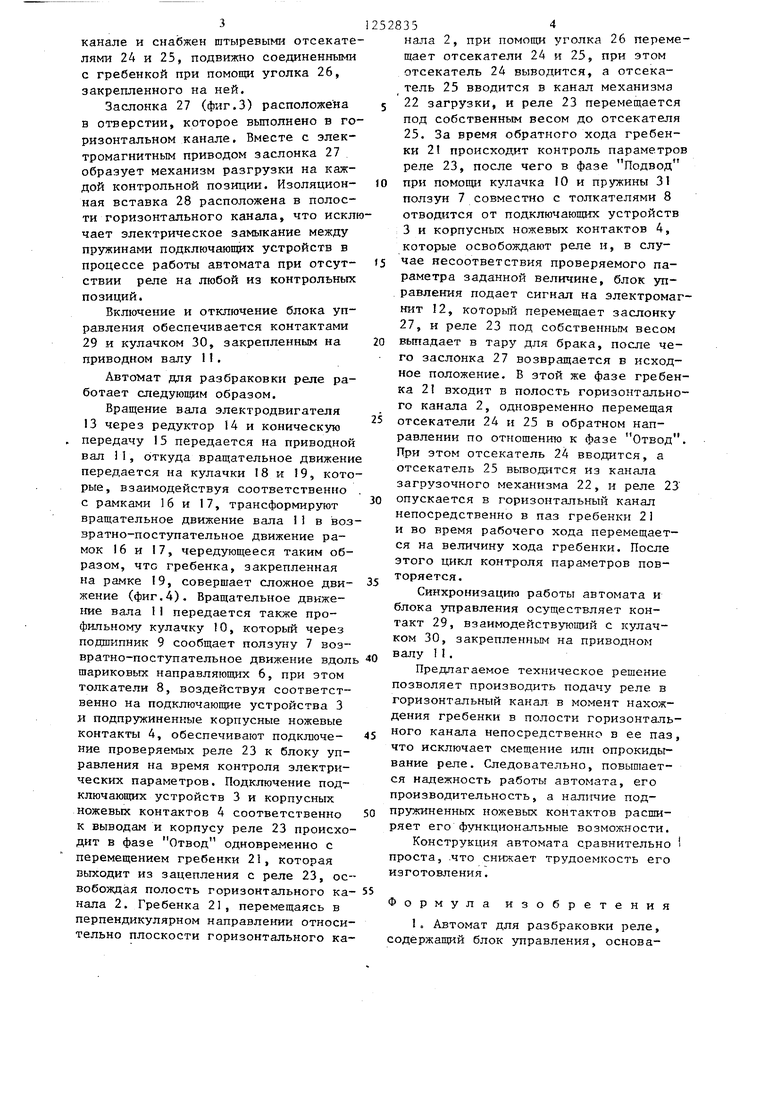
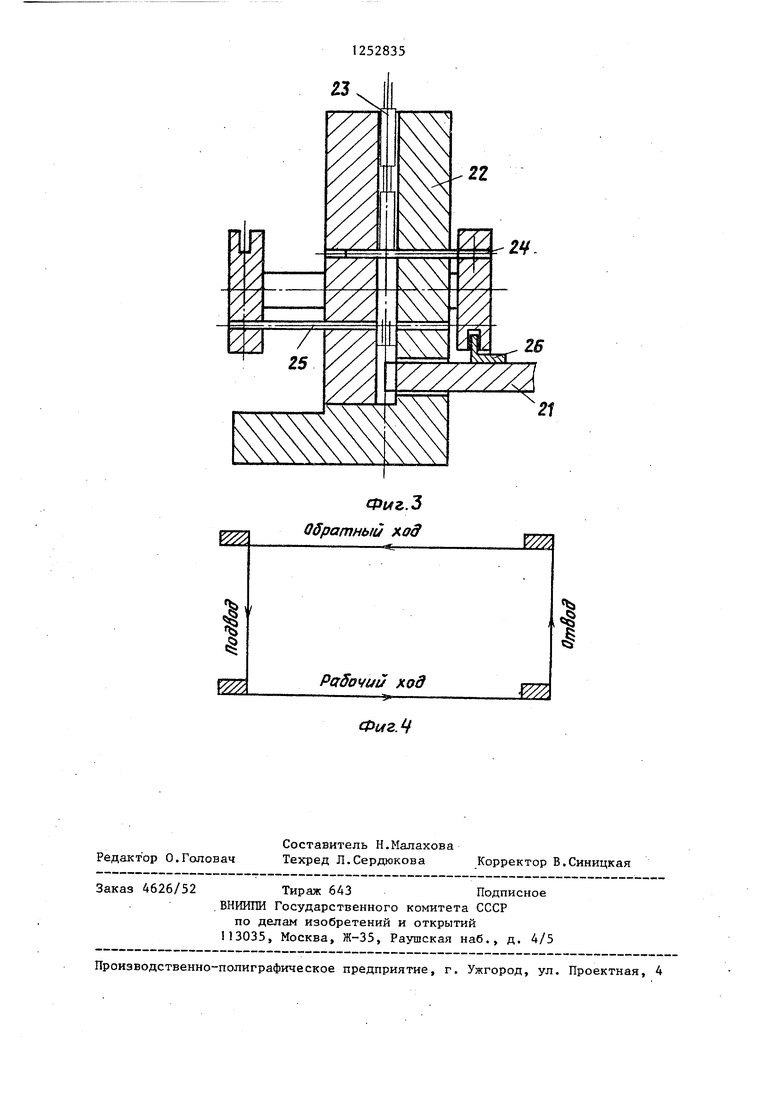
На фиг, изображен предлагаемый автомат (без электрического привода) поперечный разрез; на фиг.2 - кинематическая схема автомата; на фиг.З - узел з.агрузки с отсекателями, попе- речньй разрез; на фиг.4 - график траектории движения гребенкн.
Автомат для разбраковкн реле (фт1Г.1) содержит основание 1, }ia котором смонтированы механизм послсдо- вате;гьной подачн реле, узел ггриводиого вала, неподвжкный горизонтальный канал 2 с установлениь Ш на подключающими устройствам 3, состоящи- mi из двух шарнирно-соединенных групп контактных пружш, электрически сое- дешенных с блоком управления (не показан) , и подпружиненными корпусными
роля электрических параметров. Гребенка 21, перемещаясь в перпендикулярной плоскости горизонтального канала 2, перемещает отсекатели (О) 24, 25. Реле 23 перемещается под действием собственного веса до О 25. За время обратного хода гребенки 21 происходит контроль параметров реле 23, после чего ползун 7 с толкателями 8 отводится от ПУ 3 и НК 4, которые освобождают реле 23. В случае несоответствия проверяемого параметра заданной величине реле 23 под действием собственного веса падает в тару для брака. Устройство исключает смещение или опрокидывание реле во время контроля , 2 з.п. ф-лы, 4 ил.
ножевыми контактами 4, закренленными на боковой поверхности горизонтального канала 2, стойки 5, на которых в шариковых направляющих 6 подвижно установлен ползун 7, снабженный толкателями 8 и взаимодействующий через подшипник 9 с профильным кулачком 10, закрепленным па приводном валу 11, и механизм разгрузки с электромагнитным приводом 12.
Приводной механизм (фиг.2) содержит электродвигатель 13, редуктор 14 и коническую передачу 15, соединенную с приводным валом 11.
Механизм последовательной подачи реле состоит из подвижно соединенньпс мелоду собой двух рамок 16 и 17, внутри которых соответственно расположены два кулачка 18 и 19, закрепленных на приводном валу 11 в диаметрально противоположных направлениях, при этом рамкн установлены в П1ариковых направляющих 20 с возможностью перемещения рамки 17 с зш репленной на ней гребепкой 21 вдоль горизонтального канала 2, а рамки 16 совместно с рамкой 17 и гребенкой 21 в перпендикулярном направлении относительно канала 2.
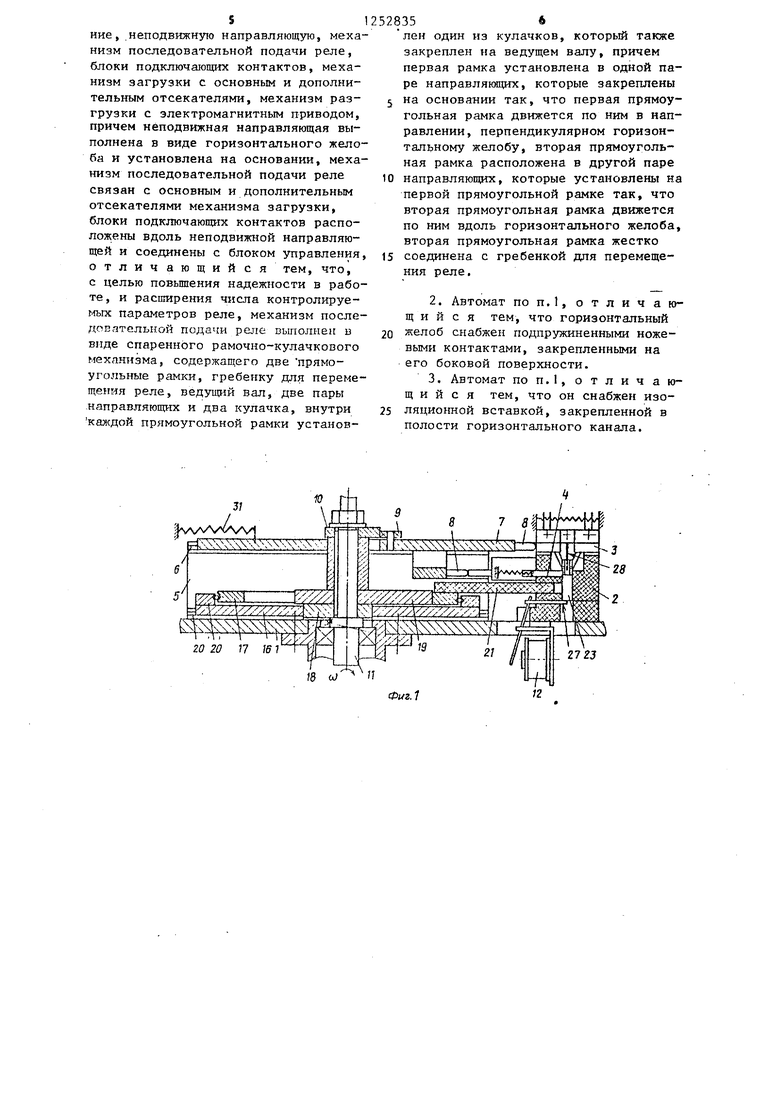
Узел 22 загрузки,для реле 23 (фиг.З) установлен в горизонтальном
3
канале и снабжен штыревыми отсекате лями 24 и 25, подвижно соединенными с гребенкой при помощи уголка 26, закрепленного на ней.
Заслонка 27 (фиг.З) расположена в отверстии, которое выполнено в горизонтальном канале. Вместе с электромагнитным приводом заслонка 27 образует механизм разгрузки на каждой контрольной позиции. Изоляционная вставка 28 расположена в полости горизонтального канала, что исклчает электрическое замыкание между пружинами подключающих устройств в процессе работы автомата при отсутствии реле на любой из контрольных позиций.
Включение и отключение блока управления обеспечивается контактами 29 и кулачком 30, закрепленным на приводном валу П.
Автомат для разбраковки реле работает следующим образом.
Вращение вала электродвигателя 13 через редуктор 14 и коническую передачу 5 передается на приводной вал 11, откуда вращательное движени передается на кулачки 18 и 19, которые, взаимодействуя соответственно с рамками 16 и 17, трансформируют вращательное движение вала 11 в возвратно-поступательное движение рамок 16 и 17, чередующееся таким образом, что гребенка, закрепленная на рамке 9, совершает сложное движение (фиг.4). Вращательное движение вала 11 передается также профильному кулачку 10, который через подшипник 9 сообщает ползуну 7 возвратно-поступательное движение вдол шариковых направляющих 6, при этом толкатели 8, воздействуя соответственно на подключающие устройства 3 и подпружиненные корпусные ножевые контакты 4, обеспечивают подключение проверяемых реле 23 к блоку управления на время контроля электрических параметров. Подключение подключающих устройств 3 и корпусных ножевых контактов 4 соответственно к выводам и корпусу реле 23 происходит в фазе Отвод одновременно с перемещением гребенки 21, которая выходит из зацепления с реле 23, освобождая полость горизонтального ка нала 2. Гребенка 21, перемещаясь в перпендикулярном направлении относительно плоскости горизонтального ка
52835
нала 2, при помощи уголка 26 перемещает отсекатели 24 и 25, при этом отсекатель 24 выводится, а отсека- тель 25 вводится в канал механизма 5 22 загрузки, и реле 23 перемещается под собственным весом до отсекателя 25. За время обратного хода гребенки 2 происходит контроль параметров реле 23, после чего в фазе Подвод 10 при помощи кулачка 10 и пружины 31 ползун 7 совместно с толкателями 8 отводится от подключающих устройств 3 и корпусных ножевых контактов 4, которые освобождают реле и, в слу- 15 чае несоответствия проверяемого параметра заданной величине, блок управления подает сигнал на электромагнит 12, который перемещает заслонку 27, и реле 23 под собственным весом 0 выпадает в тару для брака, после чего заслонка 27 возвращается в исходное положение. В этой же фазе гребенка 21 входит в полость горизонтального канала 2, одновременно перемещая 5 отсекатели 24 и 25 в обратном направлении по отношению к фазе Отвод. При этом отсекатель 24 вводится, а отсекатель 25 выводится из канала загрузочного механизма 22, и реле 23 0 опускается в горизонтальный канал непосредственно в паз гребенки 2I и во время рабочего хода перемещается на величину хода гребенки. После этого цикл контроля параметров пов- торяется.
Синхронизацию работы автомата и блока управления осуществляет контакт 29, взаимодействующий с кулачком 30, закрепленным на приводном Q валу II.
Предлагаемое техническое решение позволяет производить подачу реле в горизонтальный канал в момент нахождения гребенки в полости горизонталь- 5 ного канала непосредственно в ее паз, что исключает смещение или опрокидывание реле. Следовательно, повышается надежность работы автомата, его производительность, а наличие под- 0 пружиненных ножевых контактов расширяет его функциональные возможности.
Конструкция автомата сравнительно проста, .что снижает трудоемкость его изготовления.
Формула изобретения
1. Автомат для разбраковки реле, содержаш гй блок управления, основаS
ние,.неподвижную направляющую, механизм последовательной подачи реле, блоки подключающих контактов, механизм загрузки с основным и дополнительным отсекателями, механизм разгрузки с электромагнитным приводом, причем неподвижная направляющая выполнена в виде горизонтального желоба и установлена на основании, механизм последовательной подачи реле связан с основным и дополнительным отсекателями механизма загрузки, блоки подключающих контактов расположены вдоль неподвижной направляющей и соединены с блоком управления отличающийся тем, что, с целью повьшения надежности в работе , и расширения чиспа контролируе- ГЛ.ГХ параметров реле, механизм последовательной подачи реле выполыен в впде спаренного рамочно-кулачкового механизма, содержащего две прямоугольные рамки, гребенку для перемещения реле, ведущий вал, две пары направляющих и два кулачка, внутри каждой прямоугольной рамки установ528356
лен один из кулачков, который также закреплен на ведущем валу, причем первая рамка установлена в одной паре направляющих, которые закреплены 5 на основании так, что первая прямоугольная рамка движется по ним в направлении, перпендикулярном горизонтальному желобу, вторая прямоугольная рамка расположена в другой паре
10 направляющих, которые установлены на первой прямоугольной рамке так, что вторая прямоугольная рамка движется по ним вдоль горизонтального желоба, вторая прямоугольная рамка жестко
15 соединена с гребенкой для перемещения реле.
2.Автомат поп.1,отличан)- щ и и с я тем, что горизонтальный
20 желоб снабжен подпружиненными ножевыми контактами, закрепленными на его боковой поверхности.
3.Автомат ПОП.1, отличающийся тем, что он снабжен изо25 ляцио1гаой вставкой, закрепленной в полости горизонтального канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для разбраковки реле | 1979 |
|
SU866607A1 |
| АВТОМАТ ДЛЯ РАЗБРАКОВКИ ПОЛУПРОВОДНИКОВЫХ | 1973 |
|
SU390601A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ И ЗАГРУЗКИ НОЖЕВЫХ КОНТАКТОВ В ГНЕЗДА КОЛОДКИ РАЗЪЕМА | 1972 |
|
SU343333A1 |
| Устройство для механических испытаний и разбраковки полупроводниковых приборов | 1979 |
|
SU911655A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПАПИРОС | 1966 |
|
SU182033A1 |
| УСТРОЙСТВО для РАЗБРАКОВКИ МАГНИТНЫХ ЭЛЕМЕНТОВ СО СЛОЖНЫМ МАГНИТОПРОВОДОМ | 1969 |
|
SU254570A1 |
| Полуавтомат для подготовки радиодеталей с осевыми проволочными выводами к механизированному монтажу | 1961 |
|
SU147610A1 |
| Устройство для установки клемм в гнезда колодки | 1982 |
|
SU1050025A1 |
| Резьбонакатной автомат Кирьянова А.В. | 1988 |
|
SU1704893A1 |
| Автомат для сборки цепей | 1972 |
|
SU476072A1 |
Изобретение относится к устройствам контроля и разбраковки реле и может быть использовано в частности при производстве миниатюрных и микроминиатюрных реле. Цель изобретения - повьшение надежности в работе и расширение функциональных возможностей. Вращение вала электродвигал да f3 (Л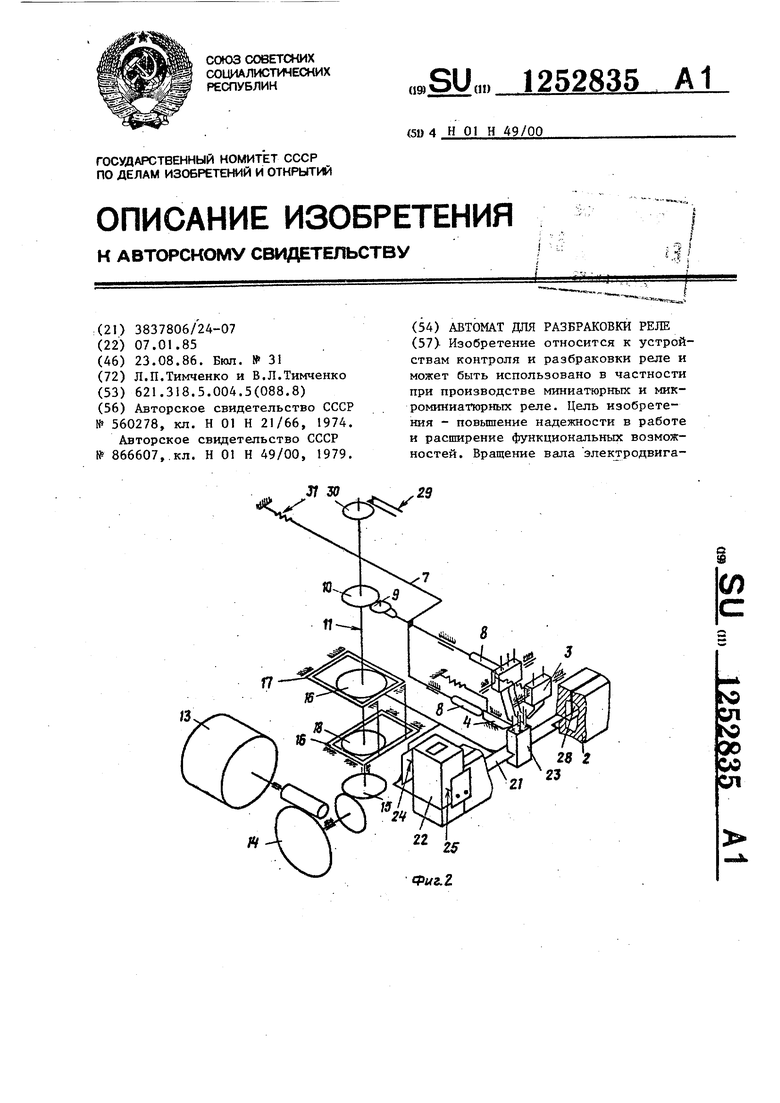
5/
Ш а)
Фиг. }
Vz.
уу 7/.
22
2V
У1
25
26
У//////А
Редактор О.Головач
Составитель Н.Малахова
Техред Л.Сердюкова Корректор В.Синицкая
Заказ 4626/52 Тираж 6АЗПодписное
. ВНРШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фмг.Ъ
Фиг.
| Автомат коммутации и разбраковки | 1974 |
|
SU560278A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для разбраковки реле | 1979 |
|
SU866607A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
