Изобретение относится к машиностроению и может быть использовано для струйной обработки, например очистки, окраски, металлизации внутренних поверхностей полых изделий типа тел вращения с криволинейными образующими, например корпусов химических аппаратов, выполненных в виде цилиндрической обечайки с эллиптическими днищами и центральным люком.
Известен манипулятор для выполнения различных технологических операций в условиях повышенной запыленности воздуха и, прежде всего для осуществления процесса дробеструйной обработки деталей, содержащий стойку, на направляющих которой установлена рука, несущая схват. Каждое звено манипулятора имеет индивидуальный гидропривод I.
Однако этот манипулятор не может быть эффективно использован для струйной обработки полостей изделий, так как имеет сложную конструкцию руки и схвата и сложную систему управления, что значительно снижает его надежность и долговечность при работе в экстремальных условиях струйной обработки.
Наиболее близким к предлагаемому является манипулятор для струйной обработки внутренних поверхностей полых изделий типа тел вращения с криволинейными образующими, содержащий щтангу, закрепленную на стойке и, установленную на ней поворотную механическую руку, кинематически связанную с приводом, штанга установлена с возможностью ротации на стойке, закрепленной на самоходной тележке, и кинематически связана с приводом, а в кинематических цепях поворота механической руки и ротации штанги установлены соединительные муфты..Обработка цилиндрической части изделия при помощи такого манипулятора осуществляется при неподвиж ной относительно штанги механической руке путем совмещения вращательного движения щтанги и поступательного движения тележки манипуляторе 2.
Однако после каждого цикла обработки вследствие трения в кинематических парах происходит рассогласование положения механической руки относительно штанги, а следовательно, и относительно обрабатываемой поверхности. Погрешность положения механической руки постепенно накапливается, что в конечном итоге приводит к существенному ухудщению эффективности работы манипулятора.
Цель изобретения - исключение погрешностей положения механической руки относительно обрабатываемой поверхности при вращении штанги и обеспечение возможности осушествления поворота руки по требуемому закону.
Указанная цель достигается тем, что манипулятор для струйной обработки, содержащий самоходную тележку, стойку, штангу с механической рукой и приводы поворота резки и вращения штанги, снабжен задатчиком программы и дифференциальным механизмом, выполненным в виде винтовой пары, винт которой кинематически связан с одним из приводов, а гайка через водило дифференциального механизма - с другим, причем водило дифференциального механизма соединено с винтом при помощи
0 дополнительно введенной управляемой муфты, а также с задатчиком программы, определяющим закон поворота руки.
На чертеже схематически изображен манипулятор.
, На самоходной тележке 1 установлена стойка 2, несущая штангу 3 с механической рукой 4. К руке прикрепляется любой инструмент для струйной обработки. Штанга 3 образует с опорой 5 вращательную пару. Вращение штанге 3 сообщает двига0 тель 6 через вращательную зубчатую пару 7 и 8 с наружным зацеплением. Поворот механической руки осуществляет двигатель 9 через зубчатую пару 10 и 11 с наружным зацеплением, обойму 12, образующую вращательную пару со штангой 3, зубчатую пару 13 и 14 с внутренним зацеплением, вал 15 и червячную пару 16 и 17. Зубчатое колесо 8 через шестерню 18 и водило 19 кинематически связано с гайкой 20, а зубчатое колесо 11 через шестерню 21 - с винтом 22.
д Водило 19 образует с гайкой 20 поступательную пару. Пары зубчатых колес 8 и 11, 7 и 10, 18 и 21 имеют равное количество зубьев. Водило 19 и винт 22 соединены посредством управляемой муфты 23, например электромагнитной. Гайка 20 образует с обоймой 24 вращательную пару, которая, в свою очередь, образует поступательную пару со скалкой 25. Через управляющий элемент 26 обойма 24 связана с задатчиком 27 программы, например резистивным. Обрабатываемое изделие 28 (корпус химического аппа0 рата) показано тонкими линиями.
Манипулятор работает следующим образом.
Совмещают ось обрабатываемого изделия 28 с осью штанги 3. При помощи самоходной тележки 1 вводят на маршевой скорости щтангу 3 с механической рукой 4 в полость обрабатываемого изделия 28. Рука с инструментом при этом развернута вдоль оси штанги вперед. По достижению инструментом оптимального расстояния до обра0 батываемой поверхности тележку 1 останавливают и включают приводы поворота руки 4 и вращения штанги 3. Механическая рука 4 поворачивается двигателем 9 через зубчатую пару 10 и 11, обойму 12, зубчатую пару 13 и 14, вал 15 и червячную пару 16
5 и 17. Штанга 3, образующая с опорой 5 стойки вращательную пару, получает вращение от двигателя 6 через зубчатую пару 7 и 8. Так как скорость поворота механической руки 4 отличается от скорости вращения штанги 3, то зубчатое колесо 11 вращает посредством шестерни 21 винт 22 с частотой, отличаюшейся от частоты, с которой зубчатое колесо 8 посредством щестерни 18 и водила 19 вращает гайку 20. Это приводит к тому, что гайка 20, вращаясь, двигается вдоль оси винта 22 и передвигает при этом обойму 24, в которой она заключена. Обойма 24, благодаря наличию ограничивающей связи со скалкой 25, передвигается только поступательно, перемещая при этом управляющий элем|ент 26, воздействующий на задатчик 27 программы, который управляет частотой вращения двигателя 9, а, следовательно, и скоростью поворота механической руки 4. При этом инструмент, укрепленный на механической руке 4, производит обработку днища изделия 28. По достижению рукой 4 нормального положения к цилиндрической части обрабатываемого изделия 28 двигатель 9 поворота руки 4 выключают, сообщают тележке 1 поступательное движение вправо с рабочей скоростью и включают управляемую муфту 23. При этом водило 19 и винт 22 образуют одно целое жесткое тело и зубчатое колесо 11 вращается двигателем 6 через зубчатые
зацепления 7-8, 8-18, 21 -11 с такой же угловой скоростью, как и зубчатое колесо 8. Таким образом, зубчатые колеса 8 и 11 вращаются синхронно и рассогласо ai: е положения механической руки 4 относ: 1ьно образующей линни внутренней поверхности обрабатываемого изделия 28 и штанги 3 не происходит.
Обработка цилиндрической части издеЛИЯ производится путем сложения поступательного движения тележки 1 и вращательного движения штанги 3 при неподвижной относительно щтанги механической руки 4. При достижении механической руки 4 конца цилиндрической части изделия 28 обработка прекращается и манипулятор с маршевой скоростью выводит штангу 3 из полости обрабатываемого изделия 28.
Предлагаемая конструкция манипулятора позволяет более эффективно и качественно производить струйную обработку внутренней поверхности полых изделий типа тел вращения, так как исключает накопление погрешности позиционирования механической руки относительно обрабатываемой поверхности.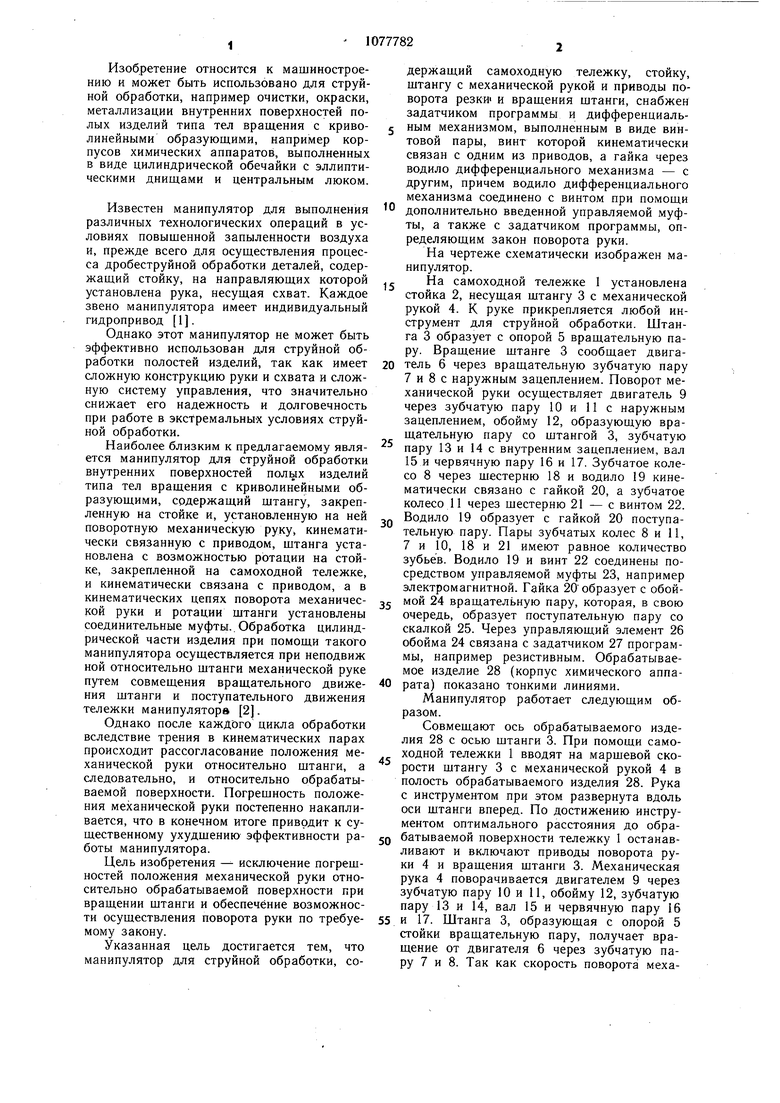
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU942982A1 |
| Манипулятор | 1985 |
|
SU1316813A1 |
| Устройство для абразивоструйной обработки внутренних поверхностей цилиндрических сосудов | 1979 |
|
SU867627A1 |
| Манипулятор | 1979 |
|
SU918082A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТЕЛЕЖЕК ИПОВОРОТА УСТАНОВЛЕННЫХ НА НИХ ИЗДЕЛИЙ | 1971 |
|
SU427893A1 |
| Подъемно-опускное устройство для испытаний подводного аппарата | 1983 |
|
SU1119920A1 |
| Судовое подъемно-поворотное устройство для испытаний подводного изделия | 1983 |
|
SU1139668A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
| Устройство для обработки внутреннихпОВЕРХНОСТЕй ТЕл ВРАщЕНия | 1979 |
|
SU841920A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
МАНИПУЛЯТОР для струйной обработки, содержаш,ий самоходную тележку, стойку, штангу с механической рукой и приводы поворота руки и вращения штанги, отличающийся тем, что, с целью исключения погрешностей положения механической руки относительно обрабатываемой поверхности при вращении штанги и обеспечения возможности осуществления поворота руки по требуемому закону, он снабжен задатчиком программы и дифференциальным механизмом, выполненным в виде винтовой пары, винт коТорой кинематически связан с однимиз приводов, а гайка через водило дифференциального механизма - с другим, причем водило дифференциального механизма соединено с винтом при помощи дополнительно введенной управляемой муфты, а также с задатчиком программы.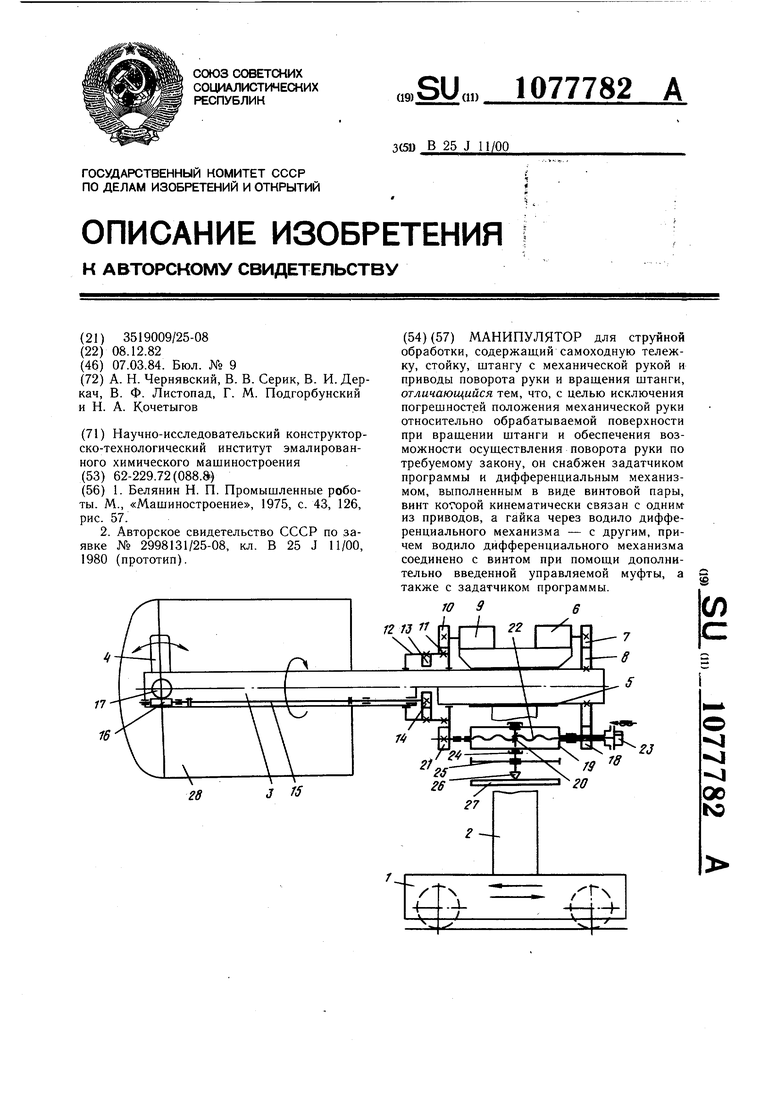
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Белянин Н | |||
| П | |||
| Промышленные роботы | |||
| М., «Машиностроение, 1975, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2998131/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
