1
Изофетевше отиосвтся к машиностро енвю, в частности к манвлулятсрам.
Известен манвпуттятср для спруйной .обработки внутренних поверхностей изделий, боковые стенки и днише которых являются телами ращениг, содержащий штангу, закрепленную на неподвижной стенке, и установленную на ней поворотную механическую руку, кинематически связанную с приводом tl.
Недостатком данного манипулятора является перемешение механической руки только в 1фямоугольной системе координат, и связи с чем офаботка внутренних поверхностей осуществляется путем совмещения вращательного и поступательного движений вадвлия.
Цель изобретения - расшврение технологических возможностей.
Указанная цель достигается тем, что штанга установлена с возможностью ротаоии на стрйке, закрепленной на самоходной тележке, и кинематически связана с щриводом, а в кинематических иепях поворота механической руки и рота-% ции штанги установлены соединительные
. муфты.
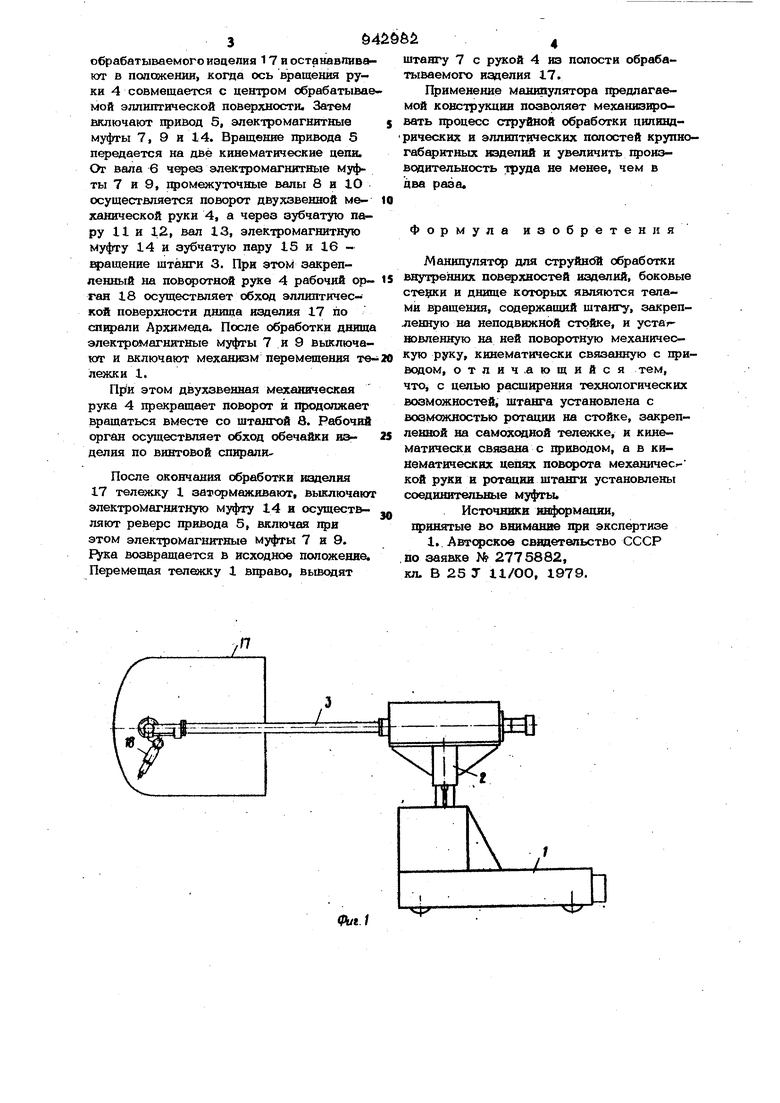
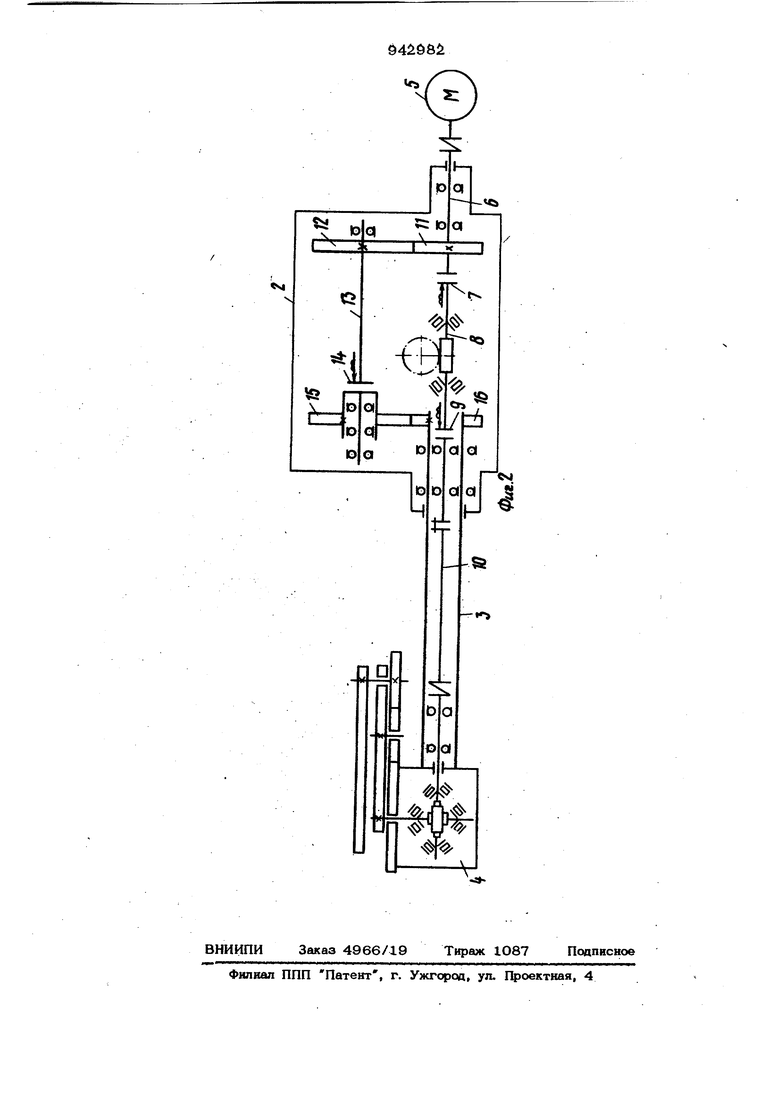
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - штанга манилуля: тора с 1ФИВОДОМ (кинематичес ая схема). Манипулятор (см. анг. 1 и 2) содержит тележку 1, на которс установлена стойка 2, несущая штангу 3 с поворотной механической рукой 4. Штанга име10ет привод 5, соединенный через вал 6, электромагнитную муфту 7, вал 8, электромагнитную муфту 9 и вал 10 с по. воротной рукой 4, а через зубчатую пару 11 и 12, вал 13, электромагнитную муф«5ту 14 и зубчатую пару 15 и 16 со штангой 3. Обрабатываемое изделие 17 показано тонкими линиями. Рабочий орган (инструмент) 18 прикреплен к механической руке 4.
20
Манипулятор работает следующим образом.
При помощи тележки 1 зввоаят штангу 3с поворотной механической рукой 4 впопость 3S обрабатываемого иацелия 17 и останавпивв ют в попожении, когда ось вращения руки 4 совмещается с центром обрабатыва мой эллиптической поверхности. Затем включают привод 5, электромагнитные муфты 7, 9 и 14. Вращение привода 5 передается на две кинематические цепи. От вала 6 электромагнитные муфты 7 и 9, 1фомежуточные валы 8 я 10 осуществляется поворот двухавешюй механической руки 4, а через зубчатую пару 11 и 12, вал 13, электромагнитную муфту 14 и зубчатую пару 15 и 16 4 ащение щтанги 3. При этом закрепленный на поворотной руке 4 рабочий оргая 18 осуществляет обхеад эллиптической поверхности днища изделия 17 по спирали Архимеда. После обработки днища электромагнитные муфты 7 и 9 выключают и включают механизм перемещения тележки 1. UfiK этом двухзвенная механическая рука 4 прекращает поворот и продолжает вращаться вместе со щтангой в. Рабочий орган осуществляет обход обечайки изделил по винтовой спиралиПосле окончания обработки изделия 17 тележку I затормаживают, выключакуг электромагнитную муфту 14 и осуществляют реверс привода 5, включая при этом электромагнитные муфты 7 и 9. возвращается в исходное положение. Перемещая тележку 1 В1фаво, выводят 6 щтангу 7 с рукой 4 из полости обрабатываемого изделия 17. Применение манипулятора предлагаемой конструкции позволяет механизировать процесс струйной обработки цилиндрических и эллиптических полостей крупногабаритных изделий и увеличить гфоизводительность труда не менее, чем в два раза Формула изобретения Манипулятч) для струйной обработки внутренних поверхностей изделий, боковые стецки и днище которых являются телами вращения, содержащий щтангу, закрепленную на неподвижной стойке, и устагновленную на ней поворотную механическую руку, кинематически связанную с приводом, отличающийся тем, что, с целью расщирения технологических возможностей, штанга установлена с возможностью ротации на стойке, закрепленной на самоходной тележке, и кинематически связана с приводом, а в К1Ь. Нематнческих цепях поворота механичес кой руки и ротации штанги установлены соединительные муфты. Источники ииформашш, 1финятые во внимание при экспертизе 1. Авторское сввдетельство СССР по заявке № 2775882, кл. В 25 У Ц/ОО, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1077782A1 |
| Манипулятор | 1985 |
|
SU1316813A1 |
| Манипулятор | 1979 |
|
SU918082A1 |
| Устройство для абразивоструйной обработки внутренних поверхностей цилиндрических сосудов | 1979 |
|
SU867627A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Манипулятор | 1986 |
|
SU1315296A1 |
| Манипулятор | 1985 |
|
SU1301688A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Манипулятор | 1972 |
|
SU441141A1 |
v
m±
n«M.
1
Ъ
