(54)ПАКЕТИРОВОЧНШ ПРЕСС
| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс пакетировочный | 1978 |
|
SU764266A1 |
| Способ получения пакетов из лома по форме внутреннего пространства электропечи и устройство для его осуществления | 1984 |
|
SU1167037A1 |
| Гидравлический пакетировочный пресс | 1981 |
|
SU996228A1 |
| СПОСОБ ПОЛУСУХОГО ПРЕССОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378110C2 |
| Механический регулятор высоты засыпки пресс-формы вертикального пресса | 1984 |
|
SU1183402A1 |
| Установка формования блоков из арболита | 2015 |
|
RU2607683C1 |
| Устройство для прессования изделий из порошковых материалов | 1983 |
|
SU1081002A1 |
| УСТРОЙСТВО И СПОСОБ ПРЕССОВАНИЯ МЕТАЛЛООТХОДОВ В ПАКЕТЫ | 2012 |
|
RU2585609C2 |
| Устройство для прессования порошковых материалов | 1991 |
|
SU1834811A3 |
| ПРЕСС ПАКЕТИРОВОЧНЫЙ | 1970 |
|
SU284661A1 |
Изобретение относится к машиностроению и может быть использовано для пакетирования, преимущественно лома черных и цветных металов.
Известен пакетировочный пресс, содержащий пресс-камеру, механизмы предварительного и окончательного прессования, а также механизм загрузки в виде короба, установленного на поворотной платформе, и дозатор с; . регистрирующим устройством 1}«
Однако такой пресс обладает недостаточной надежностью из-за необ- ходимости применения механизмов подъема короба, загруженного металлоломом значительной массы.
Цель изобретения - повьппение надежности пресса.
Указанная цель достигается тем, что пресс снабжен приводом перемещения короба и датчиками перемещения электрически связанными с регистрирующим устройством, дбзатор выполнен в виде двуплечего рычага,
пружины и стержня с упорами, связан-ными с датчиками перемещения, платформа установлена наклонно, при этом короб установлен на платформе с. возможностью перемещения и взаимодействия с одним из плеч рычага, а пружина и стержень шарнирно связаны с другим плечом рычага.
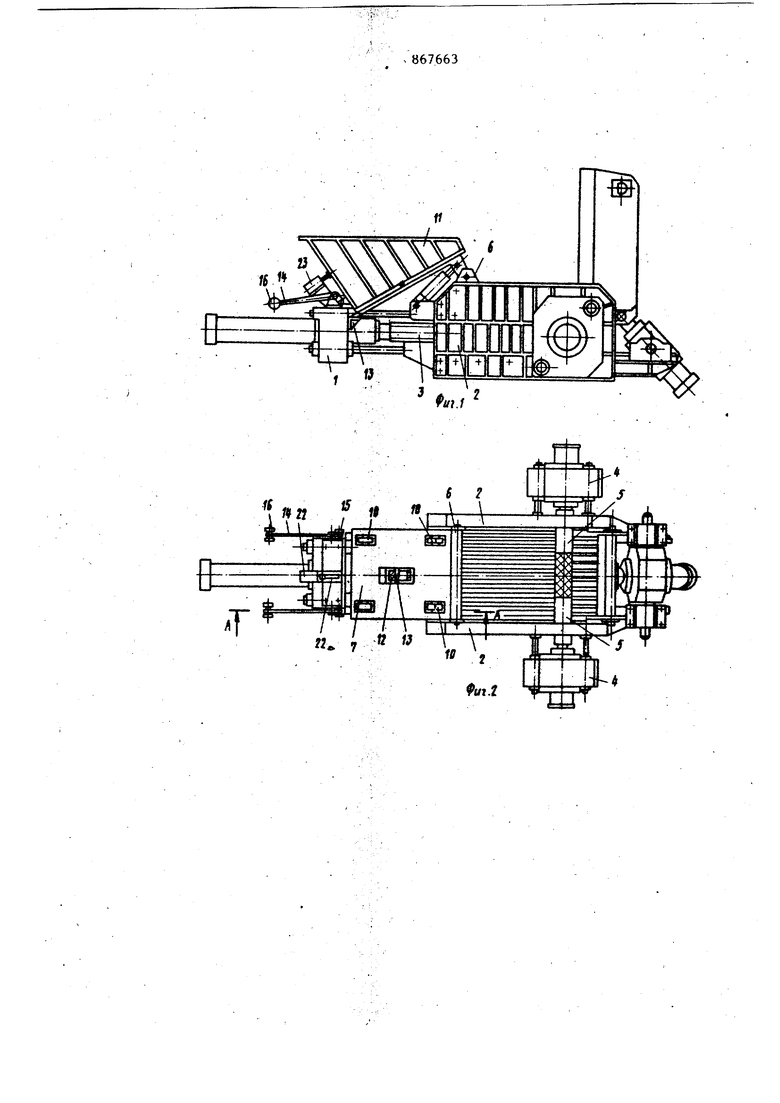
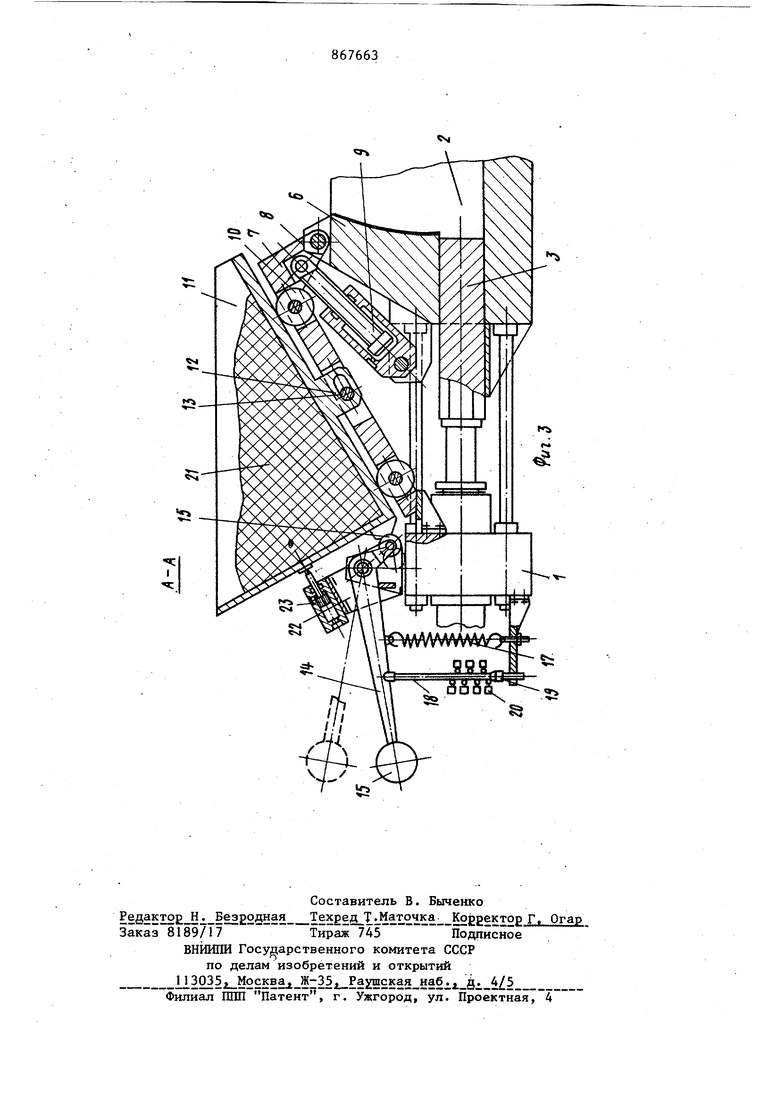
На фиг. 1 изображен пакетировочный пресс; на фиг. 2 - то
18 сверху; на фиг. 3 - разрез А-А на фиг. 2.
Пресс содержит неподвижную поперечину 1, жестко соединенную с боковыми стен1 ами 2, прессующий пуан15сон 3 механизма предварительного прессования. В прессовой камере установлен механизм окончательного прессования, состоящий из двух поперечин 4 с вмонтированными в них
20 гидроцшшндрами с пуансонами 5. Meж ду боковинами 2 закреплена распорка 6, на которой наклонно установлена платформа 7, имеющая кронштейн шариирио соединенный с распоркой 6. Крокштойн 8 шарнир1го соединен и с гндроцнлиндром 9., также шарнирно i соединенным с распоркой 6. В платфор ме 7 установлены катки 10, выступающие над нонерхнЬстью платформы, В платформе имеется продольное отверстие . На катках IО платформы размещен короб II, имеющий выступ 12, входящи в продольное отверстие платформы 7 и скрепленный с платформой ограничите лем 13. На траверсе 1 шарнирно установлен двуплечий рычаг 14,короткое плечо ры чага 14 посредством ролика 15 опирае ся в торцовую часть короба 11 механи ма загрузки. На удлиненном плече рычага 14 установлен груз 16,уравновешивающий незагруженный короб 11. Между рычагом 14 и траверсой 1 уста новлена пружина 17, выбранная на оп ределенное усилие, и стержень 18 с упорами 19, поочередно контактирующими с датчиками 20 при прибавлении очередной порции лома 21. На траверсе 1 установлен кронштейн 22 с гидроцилиндром 23, удерживающим загруженный короб 11 навесу .Р На фиг. 3 пунктирной линией показано положение рычага 14 при максимальной загрузке короба II. Пресс работает следующий образом Первоначально незагруженньй короб 1I уравновешивается противовесом 16 двуплечего рычага 14. Затем штоком гидроцилиндра 23 короб 11 пе ремещается вверх, и рычаг 14 с пружиной 17 освобождается от нагрузки, создаваемой коробом 11. Вес короба воспринимает гидроцилиндр 23. После загрузки очередной порции лома 21 шток гидроцилиндра 23 отводится от торцовой стенки короба П. Короб 11 под действием силы тяжести перемещается по каткам 10, нажимает на ролик I5 и удлиненное плечо под4нимается, тянет стержень 18 и по достижении определенной величины хода упор 19 нажимает на один из датчиков . На пульте управления появляется весовое показание первого загруженного в короб лома. После чего шток гидроцилиндра 23 установит короб I1 в исходное положение. Так измерение повторяется до до-стижения установленного веса загружаемого лома. За:тем в работу вступает гидроцилиндр 9 и лом 21 из короба 11 ссыпается в пресс-камеру. Крьшка пресса опускается, сминая лом, и прессующий пуансон 3 механизма предварительного прессования, продвигаясь вперед, уплотняет материал. Затем пуансоны 5 механизма окончательного прессования завершают пакетирование . Формула изобретения Пакетировочньй пресс содержит пресс-камеру, механизмы предварительного и окончательного прессования, а также механизм загрузки в виде короба, установленного на поворотной платформе, и дозатор с регистрирующим устройством, отличающийся тем,, что, с целью повьш1ения надежности, он снабжен приводом перемещения короба и датчиками перемещения, электрически связанными с регистрирующим устройством, дозатор выполнен в виде - двуплечего рычага, пружины и стержня с упорами, связанными с датчиком перемещения, а платформа установлена наклонно, при этом короб установлен на платформе с возможностью перемещения и взаимодействия с одним из плеч рычага, а пружина и стержень шарнирно связаны с другим плечом рычага. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 632582, кл. В 30 В 9/32, 1976.
«м
«sj
