I
изобретение относится к машиностроению и может быть использовано для контроля и сортировки деталей
Наиболее близким к предлагаемому является автомат для контроля линейных размеров деталей, содержащий корпус, установленные в нем вертикальный шпиндель с приводом вращения, закрепленный на итинделе транспортирующий диск, имеющий по периферии ячейки для контролируемьрс детгшей, установленное соосно со шпинделем под ячейками транспортирующего диска опорное кольцо, радиально размещенные напротив ячеек транспортирующего диска сортировочные заслонки с исполнительными электрстагнитами, установленные под транспЬртирующим диском напротив сортировочных заслонок приемные емкости, закрепленный над транспортирующим дискам загрузочный лоток, измерительную станцию, электрически связанную с . исполнительными электромагнитами, и механизм выталкивания деталей в приемные емкости Ц .
Однако в известном автомате каждая ячейка транспортирующего диска имеет настраиваемый механизм, удергживающий детали от выпадения и управляемый .соответствующим исполнительным электромагнитом при выталкиваf НИИ деталей в приемные емкости, что приводит к усложнению конструкции автомата.
Цель изобретения - упрощение конструкции автомата.
10 Поставленная цель достигается тем, что в автомате для контроля линейных размеров деталей.механизм выталкивания деталей в приемные емкости выполнен в виде установленного соосно
J5 со шпинделем под транспортирующим
диском подпружиненного по направлению к нему распределительного диска,на верхней поверхности которого выполнены глухне отверстия, центры которых расположены на линиях, соединяюишх ось шпинделя с центрами ячеек транспортирующего диска, и кото1яле через систему каналов соединены с. глухим отверстием на его нижней поверхности, предназначенным для подвода сжатого воздуха, а в транспортирующем диске выполнены радиальные каналы,соединяющие ячейки с отверстиями на верхней поверхности распределительного диска.
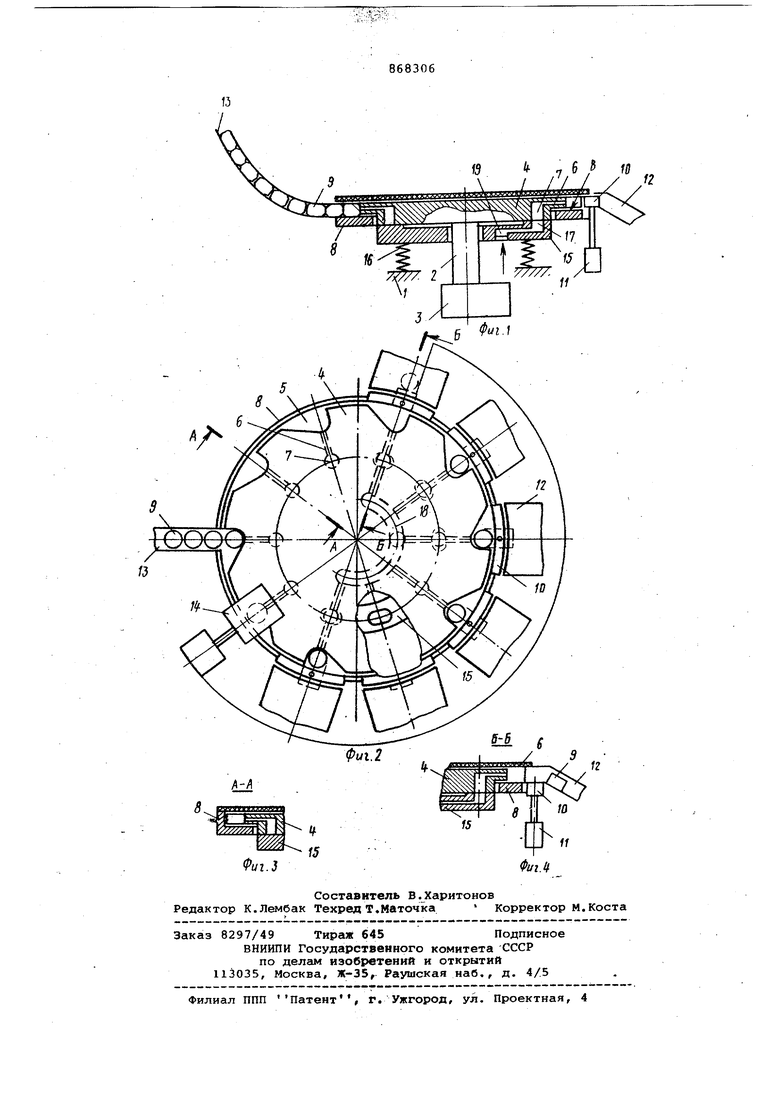
На фиг,1 показана схема предлагамого автомата для контроля линейых, размеров деталей; на фиг.2 - вид верху на фиг.З - сечение А-А на иг.2; на фиг.4 - сечение Б-Б на иг.2.
Автомат содержит корпус 1, установленные в нем вертикальный шпинель 2 с приводом 3 вращения, закепленный на шпинделе 2 транспортиующий диск 4, имеющий по периферии ячейки 5, которые с помощью радиальных каналовб соединяются с отверстиями 7 на нижней поверхности диска 4, опорное кольцо 8, предназначенное для скольжения по нему контролируемых деталей 9, радиально размещенные напротив ячеек 5 сортировочные заслонки 10 с иcпoлнитeльн лvlи электромагнитами l-l, приемные . емкости 12, загрузочный лоток 13, измерительную станцию 14, электрически связанную с электромагнитами 11, распределительный диск 15, поджимаемый. к транспортирующему диску 4 с помощью пружин 16. На верхней поверхности диска 15 выполнены глухие отверстия 17, которые через систему 18 каналов соединены с глухим отверстием 19, предназначенным для подвода сжатого воздуха.
Автомат работает следующим образом.
От привода 3 вращение передается на транспортирующий диск 4. По загрузочному лотку 13 контролируемые детали 9 перемещаются на опорное кольцо 8, устанавливаются в ячейки 5 и перемещаются к измерительной, станции 14, где формируется электрический сигнал на управление исполнительными электромагнитами 11. Опорное кольцо 8 имеет буртик по периферии для предотвращения выпадания деталей 9 из ячеек 5. При перемещении деталей мимо приемных емкостей 12 совмещаются отверстия 7 в транспортирующем диске 4 и отверстия 17 в распределительном диске 15, и струи сжатого воздуха воздействуют на контролируемые детали 9, стремясь вытолкнуть их в приемные емкости 12, входы в которые закрыты сортировочными заслонками 10. В момент прохождения контролируемой детали 9 мимо приемной емкости 12, сортировочная группа которой соответствует размеру.
зафиксированному измерительной станцией 14, электромагнит 11 опускает заслонку 10, и деталь 9 выталкивается сжатым воздухом в емкость 12.
Формула изобретения
Автомат для контроля линейных, размеров деталей, содержащий корпус, установленные в нем вертикальный шпиндель с приводом вращения, закрепленный на шпинделе транспортирующий диск, имеющий по периферии ячейки для контролируемых деталей, установленное соосно со шпинделем под ячейкс1ми транспортирующего диска опорное кольцо, радиально размещенные напротив ячеек транспортирующего диска сортировочные заслонки с исполнительными электромагнитами, установленные под транспортирующим диском напротив сортировочных заслонок приёмные емкости, закрепленный над транспортирующим диском загрузочный лоток, измерительную станцию, электрически связанную с исполнительными электромагнитами, и механизм выталкивания деталей в приемные емкости, отличающийся тем, что, с целью упрощения конструкции автомата, механизм выталкивания деталей в приемные емкости выполнен в виде установленного соосно со шпинделем под транспортирукндим диском подпружиненного по направлению к нему распределительного диска, на верхней поверхности которого выполнены глухие отверстия центры которых расположены на линиях, соединяющих ось шпинделя с центрами ячеек транспортирующего диска, и которые через систему каналов соединены с глухим ртверстием на его нижней поверхности предназначенным для подвода сжатого воздуха, а в транспортирующем диске выполнены радиальные каналы;, соединяющие ячейки с отверстиями на верхней поверхности распределительного диска.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР г 321670, кл. G OL В 5/08, 1971 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНЫМРАЗМЕРАМ | 1971 |
|
SU321670A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ по ЛИНЕЙНЫМ | 1971 |
|
SU315900A1 |
| Устройство для контроля и сортировки герконов | 1979 |
|
SU874222A1 |
| Контрольно-сортирующий автомат для плоских деталей типа шайб | 1983 |
|
SU1087205A1 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| АВТОМАТ РОТОРНОГО ТИПА ДЛЯ ПОДРЕЗКИ КРУГЛЫХЗАГОТОВОК | 1969 |
|
SU251402A1 |
| Автомат для многодиапазонной сортировки прецизионных деталей | 1982 |
|
SU1107904A1 |
| Автомат для контроля и сортировки ферромагнитных деталей на размерные группы | 1976 |
|
SU588019A1 |
| Автомат для контроля и сортировки цилиндрических деталей по размерам и форме | 1973 |
|
SU446324A1 |
| Автомат для многодиапазонной сортировки деталей | 1980 |
|
SU979842A1 |