1
Изобретение относится к неразрушающим методам контроля, а именно к средствам ультразвукового контроля качества материалов и изделий.
Известна установка для иммерсионного ультразвукового автоматизированного контроля, содержащая ванну с контактной жидкостью, искательную головку, механизмы перемещения головки по двум координатам, механизм установки головки по направлению к поверхности контролируемой заготовки и механизм коррекции угла ввода ультразвуковых колебаний со следящей системой 1.
Недостаток указанной установки заключается в ограничении типа контролируемых заготовок только заготовками, представляющими :обой тела вращения.
Цель изобретения - расширение типа контролируемых заготовок.
Указанная цель достигается тем, что установка снабжена механизмом перемещения головки по третьей координате и механизмом поворота головки, ось поворота которого проходит в процессе контроля через точку ввода ультразвуковых колебаний а следящая система выполнена в виде корпуса с закрепленными на нем излучателем и несколькими приемными пьезопреобразователями, расположенными таким образом, что их акустические оси сходятся в точке ввода ультразвуковых колебаний, а корпус следящей системы установлен на головке с возможностью поворота вокруг точки ввода ультразвуковых колебаний и связан шарнирно с механизMciMH установки головки по направлению
10 к поверхности заготовки.
Кроме того, механизм коррекции выполнен в виде поворотного кулачка, установленного на механизме установ ки головки и связанной с ним зубчатой
15 пары и подпружиненного в сторону кулачка и взаимодействующего с ним рЫт чага второго рода ось качания которого закреплена на механизме установки головки, а конец 1 лчага связан шар20нирно через скобу с головкой.
Такое вьшолнение установки дает возможность производить иммерсионный автоматизированный контроль заготовок разнообразной конфигурации и сложной
25 форма, например, штампов.
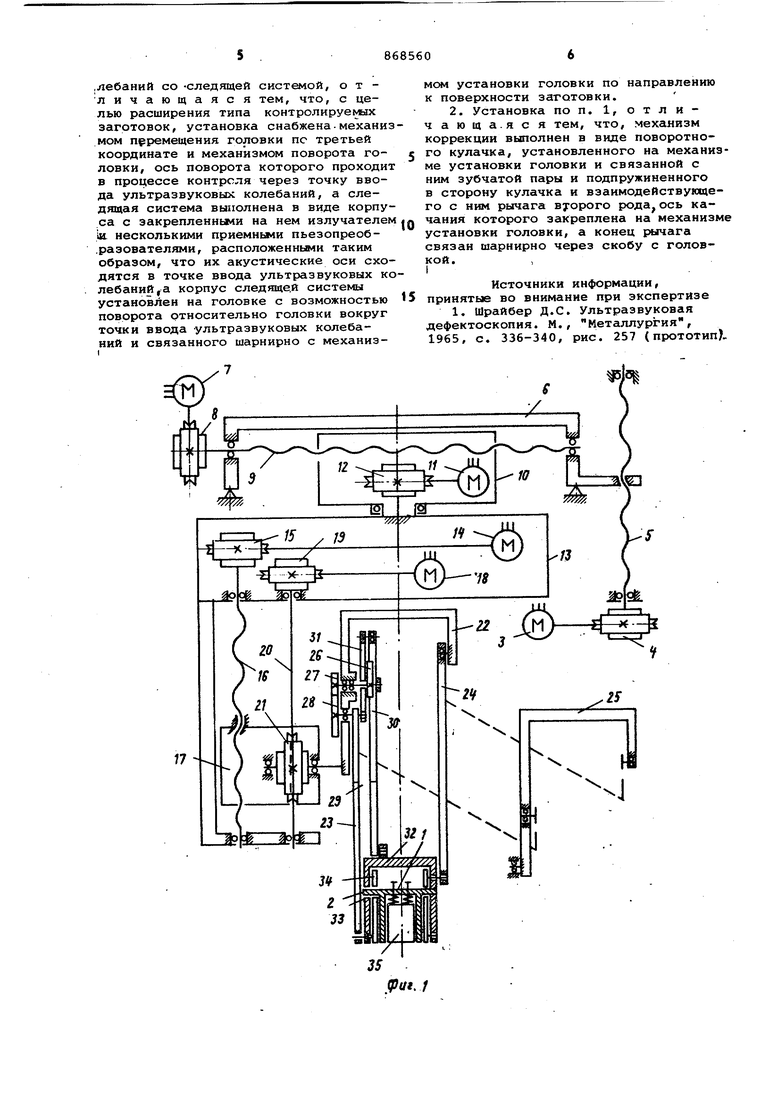
На фиг. 1 изо ргикена кинематическая схема установки; на фиг. 2 - механизм поворота головки с установленным на нем механизме.установки голов30ки по направлению к поверхности заготовки, механизмом коррекции угла ввода ультразвуковых колебаний,и; искательной ГОЛОВКОЙ со следяющей системой на фиг. 3 - механизм коррекции угла ввода ультразвуковых колебаний на фиг. 4 - вид А на фиг. 2.
Установка содержит иммерсионную ванну (не показана ) искательную головку 1 с осью 2, механизм продольного перемещения головки 1, включающий в себя электродвигатель 3 редуктор 4, ходовой винт 5 и каретку б, и механизм поперечного перемещения головки 1, содержащий электродвигатель 7, редуктор 8, ходовой винт 9 и каретку 10. На каретке 10 механизма поперечяо го перемещения закреплен механизм nof ворота головки 1, включающий электродвигатель 11 и редуктор 12. На валу редуктора 12 жестко закреплен корпус 13,.в котором расположены механизм вертикального перемещения головки 1 и механизм установки голова ки 1 по направлению к поверхности заготовки. Механизм вертикального перемещения содержит электродвигатель 14, редуктор 15 с ходовым винтом 16, который взаимодействует с кареткой 17.
Механизм установки головки 1 включает в себя электродвигатель 18, редуктор 19 со шлицевым валом 20, установленные и корпусе 13 и редуктор 21, закрепленный на каретке 17 механизма вертикального перемещения.
Механизм установки головки 1 содержит также скобу 22, связанную шарнирно f рычагами 23 и 24 и жестко с валсм редуктора 21 и скобу 25, связанную шарнирно с рычагами 23 и 24 и кареткой 17.
Установка включает в себя также механизм коррекции угла ввода ультразвуковых колебаний со следящей системой. Механизм коррекции вьшолнен в виде поворотного кулачка 26 и шестерни 27, закрепленных на общем валу и установленных с возможностью вращения на скобе 22 механизма установки головки 1, и зубчатое колесо 28, вал которого закреплен на рычаге 23 механизма установки головки 1 и которое зацепляется с шестерней 27. Механизм коррекции содержиж также подпружиненный пружиной 29 в сторону 26 и взимодействующий с ним рычаг 30 второго рода , ось качания которого закреплена на рычаге 31, взаимодействующего с рычагом 23 механизма установки головки 1, а конец 1рь1чага 30 шарнирно связан со скобОй 32, паз 33 к6тО5 ой взаимодействует с осью 2 головки 1
Следящая система выполнена в виде корпуса 34 с закрепленными на нем излучателем 35 и приемными пьезопреобразователями 36, 37, 38 и 39, расположенными таким образом, что их акустические оси сходятся в точке ввода ультразвуковых колебаний, а
корпус 34 следящей системы установлен на головке с возможностью поворота вокруг точки ввода ультразвуковых колебаний и шарнирносвязан с рычагами 23 и 24 механизма установки головки 1 по направлению к поверхности заготовки и скобой 32 и составляет со скобами 22 и 25, рычагами 23 к 24 к кареткой 17 сдвоенный параллелогра1 в 1.
Установка работает следующим oftpa3 ом.
Механизм продольного и поперечноfo перемещения искательной головки 1 эбеспечивают последовательное сканирование поверхности заготовки, помещенной в ванну с контактной жидкостью.
Разница отраженных сигналов, полученных приемными пьезопреобразователями 36 и 37, 38 и 39 от излучателя 35, производит управление работой электродвигателей 11, 14 и 18 механизмов поворота, вертикального перемещения и установки головки по направлению к поверхности заготовки соответственно.
При этом поворот головки npoi sBOдится вокруг оси, проходящей через . точку ввода ультразвуковых колебаний, а корпус 34 следящей системы устанавливается по нормали к поверхности заготовки на постоянном расстоянии от нее, необходимом для оптимальной работы искательной головки 1. Искательная головка 1 направляется к поверхности изделия под углом, который устанавливает механизм коррекции угла ввода ультразвуковых колебаний. Механизм коррекции угла ввода срабатывает от рычага 23, который при повороте через зубчатое колесо 28 и шестерню 27 вращает поворотный кулачок 26. Последний взимодействуя с рычагом 30, вызывает поворот скобы 32, которая через паз 33 и ось 2 вызывает поворот искательной головки 1, чем обеспечивается коррекция угла ввода ультразвуковых колебаний.
Предлагаемая -установка позволяет автоматизировать процесс ультразвуко1г вого контроля заготовок различной конфигурации и сложной формы. При этом могут быть проконтролированы такие места, как глубокие впадины, шарообразные поверхности и т.п., что значительно расширяет типй контролируемых заготовок.
Формула изобретения
1. Установка для иммерсионного ультразвукового автоматизированного контроля, содержащая ванну с контактной жидкостью, искательную головку, механизм перемещения головки по двум координатам, механизм установки головки по направлению к поверхности контролируемой заготовки и механизм коррекции угла ввода ультразвуковых ко.лебаний со -следящей системой, отличающаяся тем, что, с целью расширения типа контролируемых заготовок, установка снабжена-механизмом перемещения головки пс третьей координате и механизмом поворота головки, ось поворота которого проходит в процессе контроля через точку ввода ультразвуковых колебаний, а следящая система выполнена в виде корпуса с закрепленньми на нем излучателем in несколькими приёмными пьезопреоб.раэователями, расположенными таким образом, что их акустические оси сходятся в точке ввода ультразвуковых колебаний, а корпус следяще.й системы установлен на головке с возможностью поворота относительно головки вокруг точки ввода ультразвуковых колебаний и связанного шарнирно с механизмом установки головки по направлению к поверхности заготовки.
2. Установка по п. 1, отличающа.яся тем, что, механизм коррекции выполнен в виде поворотного кулачка, установленного на механизме установки головки и связанной с ним зубчатой пары и подпружиненного в сторону кулачка и взаимодействующего с ним рычага вуорого рода ось качания которого закреплена на механизм установки головки, а конец рычага связан шарнирно через скобу с головкой. . I
Источники информации, принятые во внимание при экспертизе
1. Шрайбер Д.С. Ультразвуковая дефектоскопия. М., Металлургия, 1965, с. 336-340, рис. 257 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ УЛЬТРАЗВУКОВОГО ИММЕРСИОННОГО КОНТРОЛЯ КАЧЕСТВА СВАРКИ | 1991 |
|
RU2036471C1 |
| Устройство для ультразвукового контроля | 1973 |
|
SU469083A1 |
| УСТРОЙСТВО для ПОЛУАВТОМАТИЧЕСКОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 1967 |
|
SU196417A1 |
| Устройство для ультразвукового контроля вертикально расположенных корпусов энергетического оборудования | 1988 |
|
SU1563395A1 |
| Эхо-метод ультразвукового контроля | 1973 |
|
SU538289A1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ СОЕДИНЕНИЙ | 2019 |
|
RU2721480C1 |
| Устройство для ультразвукового контроля сварных швов изделий | 1983 |
|
SU1107044A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Исполнительный механизм следящей системы ультразвукового дефектоскопа | 1969 |
|
SU302659A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2001 |
|
RU2184372C1 |

