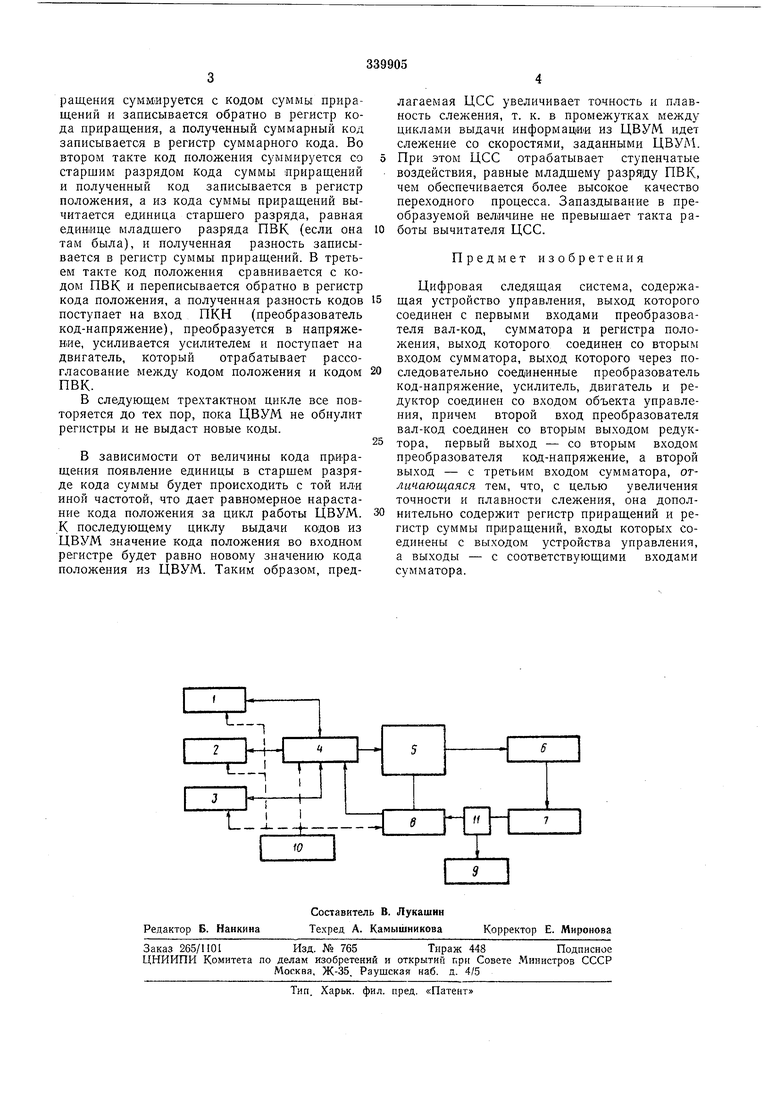
Изобретение относится к устройствам связи цифровых вычислительных устройств с аналоговыми устройствами и может быть использовано в системах управления, содержащих цифровую вычислительную машину и предназначенных для наведения антенн, визирных блоков и тому подобных устройств слежения за подвижными объектами. Известны цифровые следящие системы, содержащие устройство управления, выход которого соединен с первыми входами преобразователя вал-код, сумматора и регистра положения; выход регистра положения соединен со вторым входом сумматора, выход которого через последовательно соединенные преобразователь код-напряжение, усилитель, двигатель и редуктор соединен со входом объекта управления, причем второй вход преобразователя вал-код соединен со вторым выходом редуктора, первый выход - со вторым входом преобразователя код-на пря кение, а второй выход - с третьим входом сумматора. Однако в известных цифровых следящих системах (ЦСС) появляются большие динамические ошибки при значительном изменении кодов, выданных из цифровой вычисли-: тельной управляющей машины (ЦВУМ) в двух соседних тактах, а при плавно изменяюихихся выходных кодах ЦВУМ выходной вал ЦСС может двигаться рывками, т. к. скорость отработки ЦСС сигнала ЦВУМ определяется параметрами ЦСС. Целью изобретения является повышение точности и плавности слежения ЦСС без увелечения быстродействия ЦВУМ и числа разрядов преобразователя вал-код (ПВК), что достигается введением в ЦСС регистра приращений и регистра суммы приращений, входы которых соединены с выходом устройства управления, а выходы - с соответствующими входами сумматора. Система, представленная на чертеже, содержит регистр / положения, регистр 2 приращений, регистр 3 суммы приращений, сумматор 4, преобразователь 5 код-напряжение, усилитель 6, двигатель 7, преобразователь 8 вал-код, объект управления 9, устройство управления W, редуктор Л. При работе системы ЦВУМ выдает в ЦСС две величины: одна - значение кода, соответствующее положению ЦСС в момент выдачи кода (код положения), и вторая величина - это код, который является приращением преобразуемой величины за цикл работы ЦСС. Цри этом величина второго кода может быть значительно меньше единицы младшего разряда ПВК. ращения суммируется с кодом суммы приращений и записывается обратно в регистр кода приращения, а полученный суммарный код записывается в регистр суммарного кода. Во втором такте код положения суммируется со старшим разрядом кода суммы приращений и полученный код записывается в регистр положения, а из кода суммы приращений вычитается единица старшего разряда, равная единице младшего разряда ПВК (если она там была), и полученная разность записывается в регистр суммы приращений. В третьем такте код положения сравнивается с кодом ПВК и переписывается обратно в регистр кода положения, а полученная разность кодов поступает на вход ПКН (преобразователь код-напряжение), преобразуется в напряжение, усиливается усилителем и поступает на двигатель, который отрабатывает рассогласование между кодом положения и кодом в следующем трехтактном цикле все повторяется до тех пор, пока ДВУМ не обнулит регистры и не выдаст новью коды. В зависимости от величины кода приращения появление единицы в старшем разряде кода суммы будет происходить с той или иной частотой, что дает равномерное нарастание кода положения за цикл работы ДВУМ. К последующему циклу выдачи кодов из ДВУМ значение кода положения во входном регистре будет равно новому значению кода положения из ДВУМ. Таким образом, предлагаемая ДСС увеличивает точность и плавность слежения, т. к. в промежутках между циклами выдачи информации из ДВУМ, идет слежение со скоростями, заданными ДВУМ. При этом ДСС отрабатывает ступенчатые воздействия, равные младшему разряду ПВК, чем обеспечивается более высокое качество переходного процесса. Запаздывание в преобразуемой величине не превышает такта работы вычитателя ДСС. Предмет изобретения Дифровая следящая система, содержащая устройство управления, выход которого соединен с первыми входами преобразователя вал-код, сумматора и регистра положения, выход которого соединен со вторым входом сумматора, выход которого через последовательно соединенные преобразователь код-напряжение, усилитель, двигатель и редуктор соединен со входом объекта управления, причем второй вход преобразователя вал-код соединен со вторым выходом редуктора, первый выход - со вторым входом преобразователя код-напряжение, а второй выход - с третьим входом сумматора, отличающаяся тем, что, с целью увеличения точности и плавности слежения, она дополнительно содержит регистр приращений и регистр суммы приращений, входы которых соединены с выходом устройства управления, а выходы - с соответствующими входами сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Цифро-аналоговая следящая система | 1974 |
|
SU613290A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Аналого-цифровой инкрементный дифференциатор | 1985 |
|
SU1343410A1 |
| Устройство для вычисления полиномиальной функции от аналогового аргумента | 1990 |
|
SU1737444A1 |
| ЦИФРОВОЙ ГЕНЕРАТОР ДЛЯ ЦИФРОВЫХ СЛЕДЯЩИХ СИСТЕМ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ | 2000 |
|
RU2180125C1 |
| Многоканальный цифровой коррелятор | 1983 |
|
SU1211753A1 |
| Цифровая следящая система | 1979 |
|
SU868700A1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1981 |
|
SU1083360A1 |
