Изобоетение относится к промышленному транспорту, в частности к загру- зочно-разгрузочным устройствам автоматизированных складов.
Цель изобретения - повышение надежности.
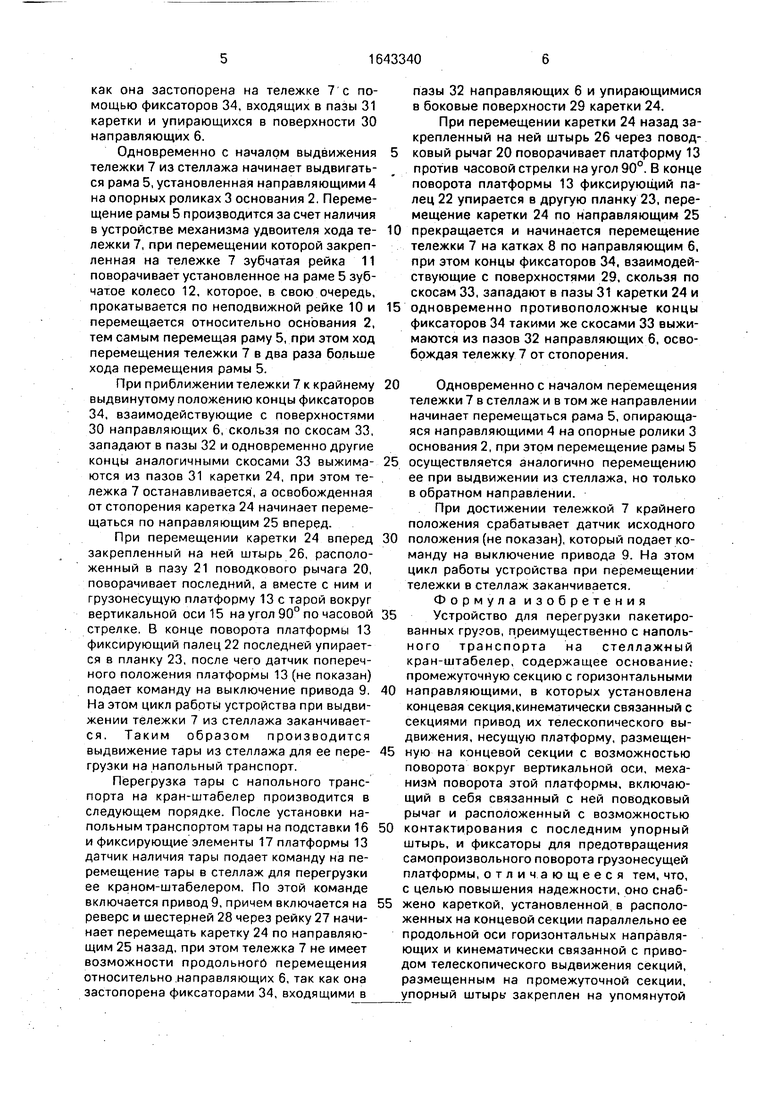
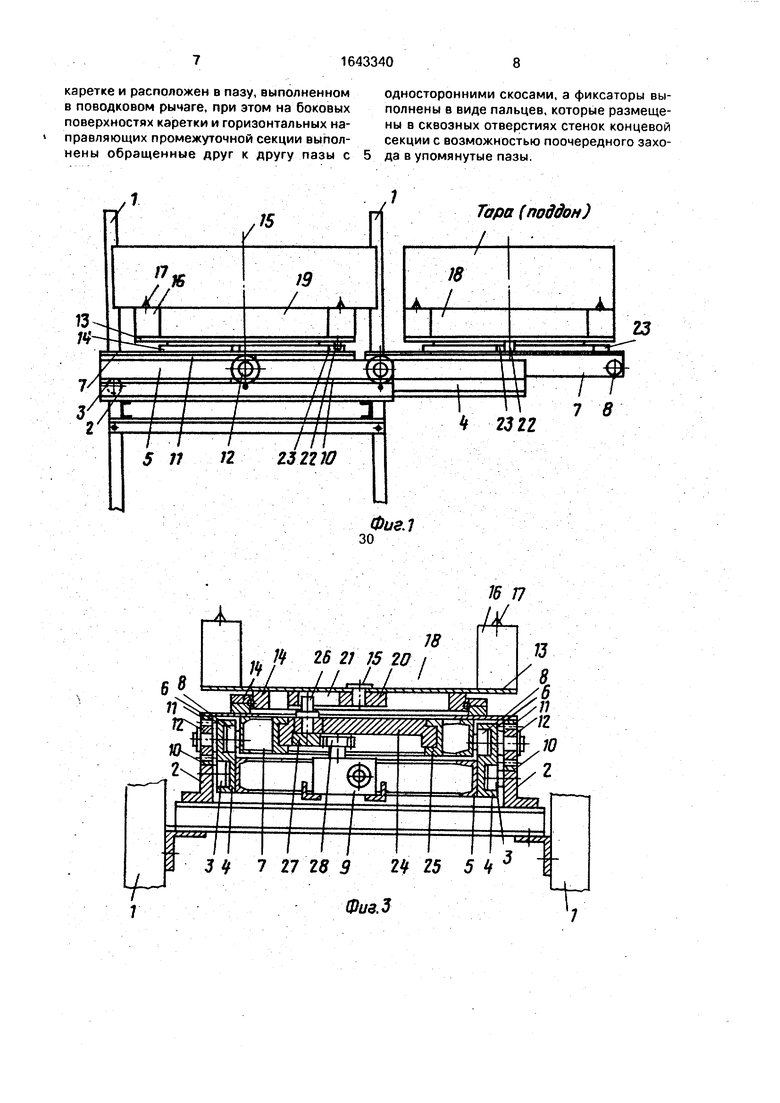
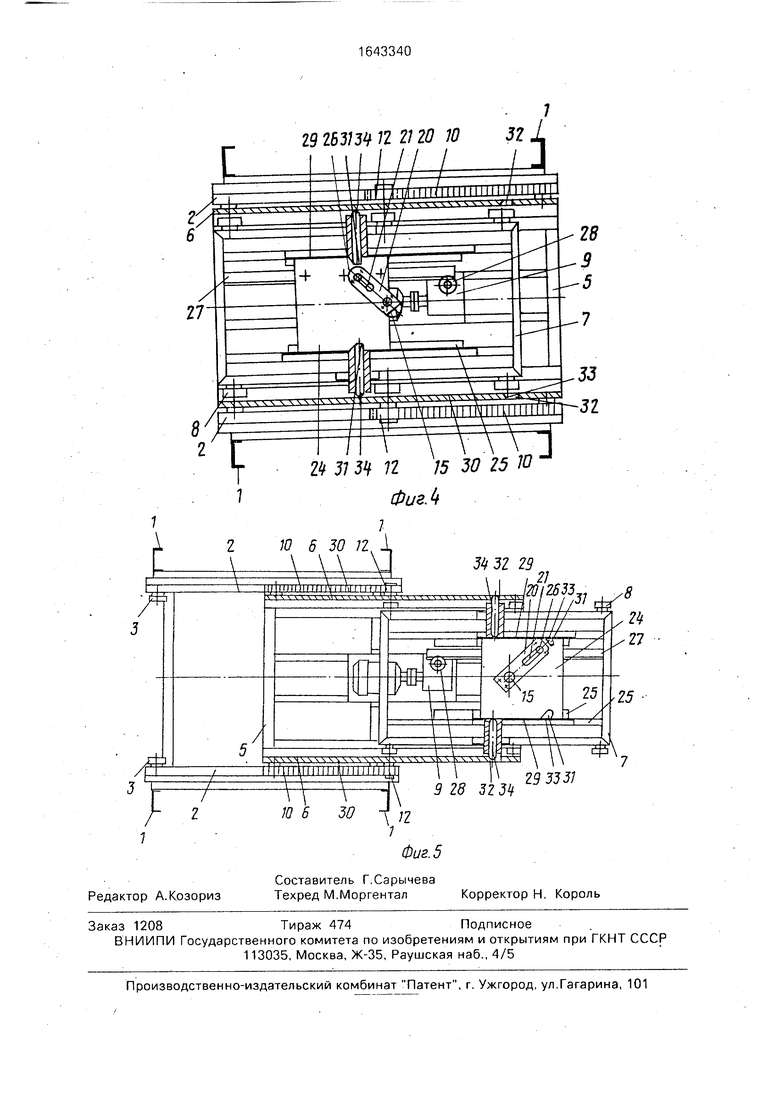
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - то же, поперечный вертикальный разрез; на фиг.4 -то же, при нахождении тележки в стеллаже в исходном положении, горизонтальный разрез; на фиг.5 - то же, при выдвинутом положении тележки и повернутом на 90° положении грузонесущей платформы.
Устройство для перегрузки пакетированных грузов содержит закрепленное на стойках 1 многоярусного стелажа основание 2 с опорными роликами 3, на которых посредством направляющих 4 установлена выдвижная рама 5, выполняющая функцию промежуточной секции и выполненная с направляющими 6, на которых расположена выполняющая функцию концевой секции тележка 7 с катками 8, перемещаемая приводом 9, закрепленным на раме 5. Устройство содержит также зубчато-реечный механизм удвоителя хода тележки 7, включающий неподвижную рейку 10, закрепленную на основании 2, подвижную рейку 11, закрепленную на тележке 7, и установленное на раме 5 свободно вращающееся зубчатое колесо 12, находящееся в постоянном зацеплении с рейками 10 и 11.
Тележка 7 снабжена грузонесущей платформой 13, смонтированной на поворотном круге 14с возможностью поворота относительно вертикальной оси 15. Сверху на платформе 13 установлены подставки 16 с фиксирующими элементами 17, образующие проемы 18 и 19 для прохода грузозах- ватов крана-штабелера и напольного транспорта (не показаны), а снизу платформы 13 закреплен поводковый рычаг 20, имеющий паз 21, плоскость симметрии которого проходит через вертикальную ось 15. На платформе 13 закреплен также фиксирующий палец 22, взаимодействующий поочередно с закрепленными на тележке 7 упорными планками 23, обеспечивающими поворот платформы 13 на угол 90°.
Тележка 7 снабжена также подвижной кареткой 24, смонтированной на направляющих 25 с возможностью относительного продольного перемещения при повороте платформы 13. На каретке 24 закреплен упорный штырь 26, свободный конец которого расположен в пазу 21 поводкового рычага 20 и находится с ним в постоянном зацеплении. В исходном положении устройства тележка 7 находится в ячейке стеллажа, не выходя за его габариты,
На каретке 24 закреплена зубчатая рейка 27, которая находится в зацеплении с
зубчатой шестерней 28 привода 9 перемещения тележки 7. На боковых поверхностях 29 каретки 24 и поверхностях 30 направляющих 6 выполнены пазы 31 и 32 с односторонним скосом 33, которые взаимодействуют
0 с фиксаторами 34, выполненными в виде пальцев, расположенных в горизонтальной плоскости в стенках тележки 7 в промежутке между кареткой 24 и направляющими 6. В исходном положении устройства пазы 31 и
5 32 смещены один относительно другого на величину, равную половине хода тележки 7. При перемещениях и в исходном положении тележки 7 концы фиксаторов 34 взаимодействуют с пазами 31 каретки 24 и
0 поверхностями 30 направляющих 6. Это обеспечивает стопорение каретки 24 от относительного продольного перемещения, предохраняющее платформу 13 от произвольного разворота при перемещениях те5 лежки 7.
В конечном выдвинутом положении тележки 7 при поворотах платформы 13 концы фиксаторов 34 взаимодействуют с пазами 32 направляющих 6 и боковыми поверхно0 стями 29 каретки 24. При этом каретка 24 освобождается от стопорения концами фиксаторов 34 и, имея возможность относительного продольного перемещения, осуществляет принудительный поворот
5 платформы 13с помощью штыря 26 и рычага 20.
Устройство для перегрузки пакетированных грузов работает следующим образом.
0 Загрузка грузонесущей платформы 13 тарой (поддоном) осуществляется с одной стороны захватом крана-штабелера при нахождении тележки 7 в исходном положении (в стеллаже), а с другой стороны захватом
5 напольного транспорта при нахождении тележки 7 в крайнем выдвинутом положении и повернутом поперек тележки 7 положении платформы 13.
После установки краном-штабелером та- 0 ры на подставки 16 и фиксирующие элементы 17 платформы 13 отдатчик, наличия тары (не показан) подается команда на выдвижение тары из стеллажа в зону ее перегрузки напольным транспортом. По этой команде 5 включается привод 9, который посредством шестерни 28 через рейку 27 и каретку 24 начинает перемещать тележку 7 на катках 8 по направляющим 6, при этом каретка 24 не имеет возможности продольного перемещения относительно направляющих 25, так
как она застопорена на тележке 7 с помощью фиксаторов 34, входящих в пазы 31 каретки и упирающихся в поверхности 30 направляющих 6.
Одновременно с началом выдвижения тележки 7 из стеллажа начинает выдвигаться рама 5, установленная направляющими 4 на опорных роликах 3 основания 2. Перемещение рамы 5 производится за счет наличия в устройстве механизма удвоителя хода тележки 7, при перемещении которой закрепленная на тележке 7 зубчатая рейка 11 поворачивает установленное на раме 5 зубчатое колесо 12, которое, в свою очередь, прокатывается по неподвижной рейке 10 и перемещается относительно основания 2, тем самым перемещая раму 5, при этом ход перемещения тележки 7 в два раза больше хода перемещения рамы 5.
При приближении тележки 7 к крайнему выдвинутому положению концы фиксаторов 34, взаимодействующие с поверхностями 30 направляющих 6, скользя по скосам 33, западают в пазы 32 и одновременно другие концы аналогичными скосами 33 выжимаются из пазов 31 каретки 24, при этом тележка 7 останавливается, а освобожденная от стопорения каретка 24 начинает перемещаться по направляющим 25 вперед.
При перемещении каретки 24 вперед закрепленный на ней штырь 26, расположенный в пазу 21 поводкового рычага 20, поворачивает последний, а вместе с ним и грузонесущую платформу 13с тарой вокруг вертикальной оси 15 на угол 90° по часовой стрелке. В конце поворота платформы 13 фиксирующий палец 22 последней упирается в планку 23, после чего датчик поперечного положения платформы 13 (не показан) подает команду на выключение привода 9. На этом цикл работы устройства при выдвижении тележки 7 из стеллажа заканчивается. Таким образом производится выдвижение тары из стеллажа для ее перегрузки на напольный транспорт.
Перегрузка тары с напольного транспорта на кран-штабелер производится в следующем порядке. После установки напольным транспортом тары на подставки 16 и фиксирующие элементы 17 платформы 13 датчик наличия тары подает команду на перемещение тары в стеллаж для перегрузки ее краном-штабелером. По этой команде включается привод 9, причем включается на реверс и шестерней 28 через рейку 27 начинает перемещать каретку 24 по направляющим 25 назад, при этом тележка 7 не имеет возможности продольного перемещения относительно направляющих 6, так как она застопорена фиксаторами 34, входящими в
пазы 32 направляющих 6 и упирающимися в боковые поверхности 29 каретки 24.
При перемещении каретки 24 назад закрепленный на ней штырь 26 через повод5 ковый рычаг 20 поворачивает платформу 13 против часовой стрелки на угол 90°. В конце поворота платформы 13 фиксирующий палец 22 упирается в другую планку 23, перемещение каретки 24 по направляющим 25
10 прекращается и начинается перемещение тележки 7 на катках 8 по направляющим 6, при этом концы фиксаторов 34, взаимодействующие с поверхностями 29, скользя по скосам 33, западают в пазы 31 каретки 24 и
15 одновременно противоположные концы фиксаторов 34 такими же скосами 33 выжимаются из пазов 32 направляющих 6, освобождая тележку 7 от стопорения.
0 Одновременное началом перемещения тележки 7 в стеллаж и в том же направлении начинает перемещаться рама 5, опирающаяся направляющими 4 на опорные ролики 3 основания 2, при этом перемещение рамы 5
5 осуществляется аналогично перемещению ее при выдвижении из стеллажа, но только в обратном направлении.
При достижении тележкой 7 крайнего положения срабатывает датчик исходного
0 положения (не показан), который подает команду на выключение привода 9. На этом цикл работы устройства при перемещении тележки в стеллаж заканчивается. Формула изобретения
5Устройство для перегрузки пакетированных грузов, преимущественно с напольного транспорта на стеллажный кран-штабелер, содержащее основание,- промежуточную секцию с горизонтальными
0 направляющими, в которых установлена концевая секция,кинематически связанный с секциями привод их телескопического выдвижения, несущую платформу, размещен5 ную на концевой секции с возможностью поворота вокруг вертикальной оси, механизм поворота этой платформы, включающий в себя связанный с ней поводковый рычаг и расположенный с возможностью
0 контактирования с последним упорный штырь, и фиксаторы для предотвращения самопроизвольного поворота грузонесущей платформы, отличающееся тем, что, с целью повышения надежности, оно снаб5 жено кареткой, установленной в расположенных на концевой секции параллельно ее продольной оси горизонтальных направляющих и кинематически связанной с приводом телескопического выдвижения секций, размещенным на промежуточной секции, упорный штырь- закреплен на упомянутой
каретке и расположен в пазу, выполненном в поводковом рычаге, при этом на боковых поверхностях каретки и горизонтальных направляющих промежуточной секции выполнены обращенные друг к другу пазы с
односторонними скосами, а фиксаторы выполнены в виде пальцев, которые размещены в сквозных отверстиях стенок концевой секции с возможностью поочередного захода в упомянутые пазы.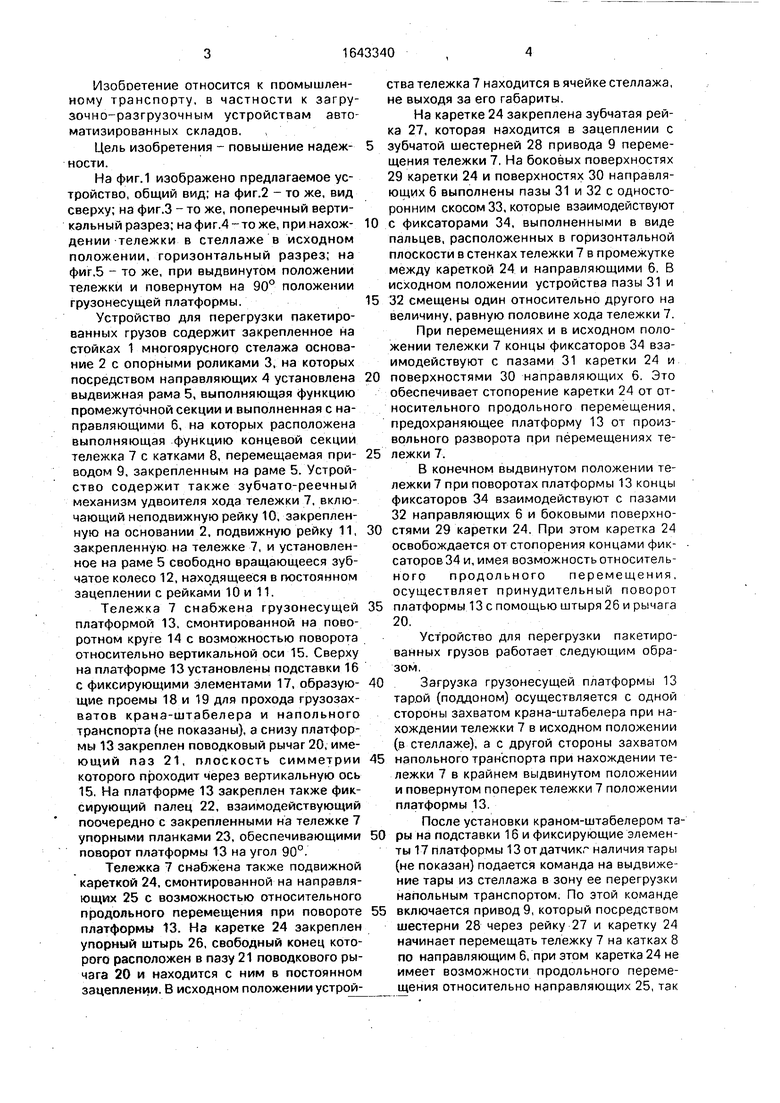
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный стол для перегрузки пакетированных грузов | 1976 |
|
SU593972A1 |
| Автоматизированная транспортно-накопительная система | 1988 |
|
SU1648732A1 |
| Гибкая автоматизированная система | 1987 |
|
SU1562107A1 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1530535A1 |
| КРАН-ШТАБЕЛЕР | 1965 |
|
SU214390A1 |
| Транспортно-накопительная система | 1984 |
|
SU1222502A1 |
| Грузозахват для стеллажного крана-штабелера | 1980 |
|
SU874600A1 |
| Перегрузочное устройство для штучных грузов | 1973 |
|
SU500134A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
Изобретение относится к машиностроению и может быть использовано в качестве перегрузочного устройства на автоматизированных складах Цель изобретения - повышение надежности. Устройство содержит основание 2 и выполняющую функцию промежуточной секции раму 5 с направляющими 6, на которых установлена выполняющая функцию концевой секции тележка 7. Последняя связана с приводом 9 ее перемещения и снабжена грузонесущей платформой 13, имеющей механизм поворота, включающий поводковый рычаг 20 с пазом 21 и упорный штырь 26. Кроме того, устройство 7 содержит фиксаторы в виде пальцев для сто- порения платформы 13 В устройстве рама 5 установлена подвижно относительно основания 2, тележка 7 снабжена кареткой 24, смонтированной на направляющих 25 с возможностью относительного продольного перемещения и соединенной с приводом 9 посредством шестерни 28 и рейки 27, упорный штырь 26 закреплен на каретке и размещен в пазу 2, рычага 20. На каретке 24 и направляющих 6 выполнены пазы с односторонним скосом, взаимодействующие с концами пальцев фиксаторов Устройство снабжено зубчато-реечным механизмом удвоителя хода тележки 7, включающим неподвижную 10 и подвижную 11 рейки, а также зубчатое колесо. При перемещениях тележки 7 грузонесущая платформа 13 стопорится пальцами фиксаторов через пазы каретки 24, а при поворотах платфо рмы 13 тележка 7 стопорится пальцами фиксаторов через пазы направляющих 6. Платформа 13 поворачивается рычагом 20 через штырь 26 5 ил Ю у ё О ± СО 00 . о
ж
Щ 26 21 15 20
f. If LO Ј1 Ю W I
9/ /
+
Л3 1} 7 27 28 3
Фи&1
30
16 П
#
13
Л
72
Фиа.З
29 263734 П 2120 Ю
8
г ю б зо п
Редактор А.Козориз
Фиг. 5
Составитель Г.Сарычева Техред М.Моргентал
ti
П
rffj
/5 30 25 Ю J
ФигЛ
2з
12/12633
tJJ vJ
8
2b 27
25
Корректор Н. Король
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1402512A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
