Известны устройства для захвата и распределения по рабочим местам штучных грузов, включающие подвижные по замкнутым направляющим тележки, оборудованные собственным приводом и грузозахватным механизмом и контактирующие в местах загрузки и разгрузки с соответствующими командными механизмами, установленными на направляющих. Однако такие устройства имеют недостаточную эффективность.
Целью настоящего изобретения является создание устройства с более высокой эффективностью работы.
В предлагаемом устройстве привод каждой тележки- выполнен в виде связапного с электродвигателем дифференциального редуктора, один выходной вал которого связан с тяговыми звездочками, установленными на тележке и взаимодействующими с закрепленными на направляющих цепями, а другой вал через однооборотную муфту, контактирующую с унорной планкой командного механизма, и кривощипно-шатунный механизм - с грузозахватным механизмом. Последний выиолнеп в виде реек с захватами, подвижных в противоположные стороны в горизонтальной плоскости и связанных с реечным колесом, взаимодействующим через установленный на его оси кулачок с толкателем, щарнирно связанным с щатуном кривощипно-щатунного механизма. Каждый командный механизм представляет собой пневмоцилиндр с двусторонним щтоком, один конец которого связан с фиксирующим тележку ловителем, а другой- с упорной планкой.
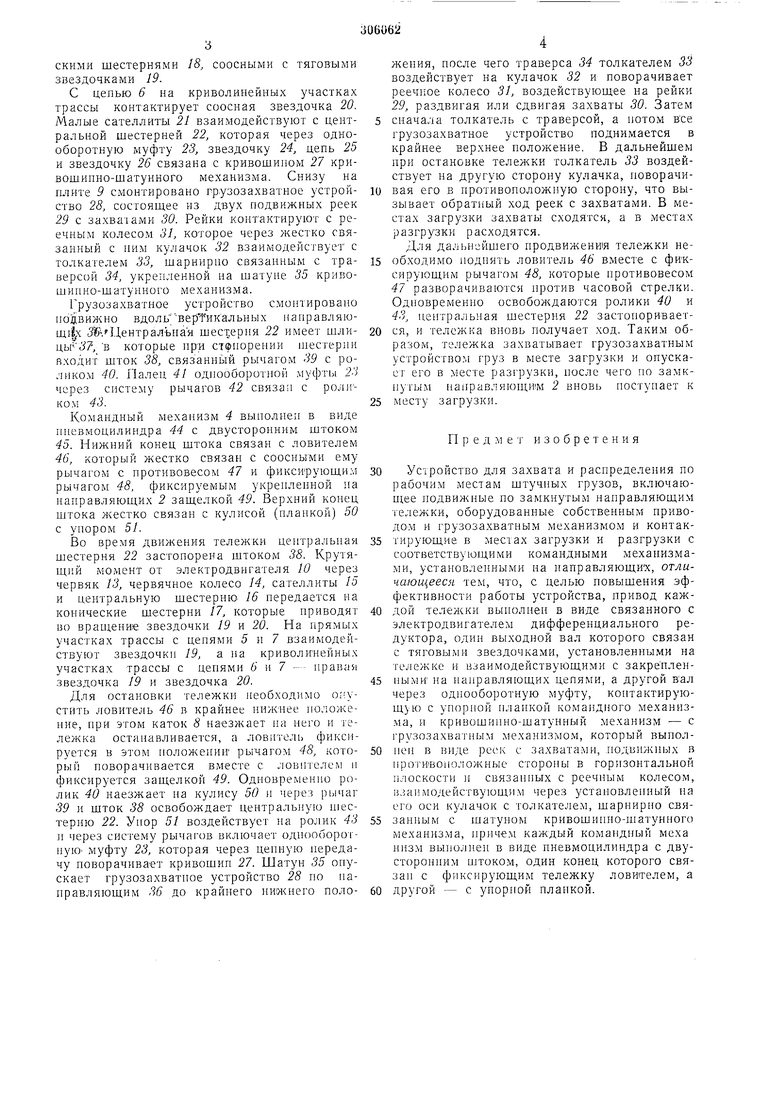
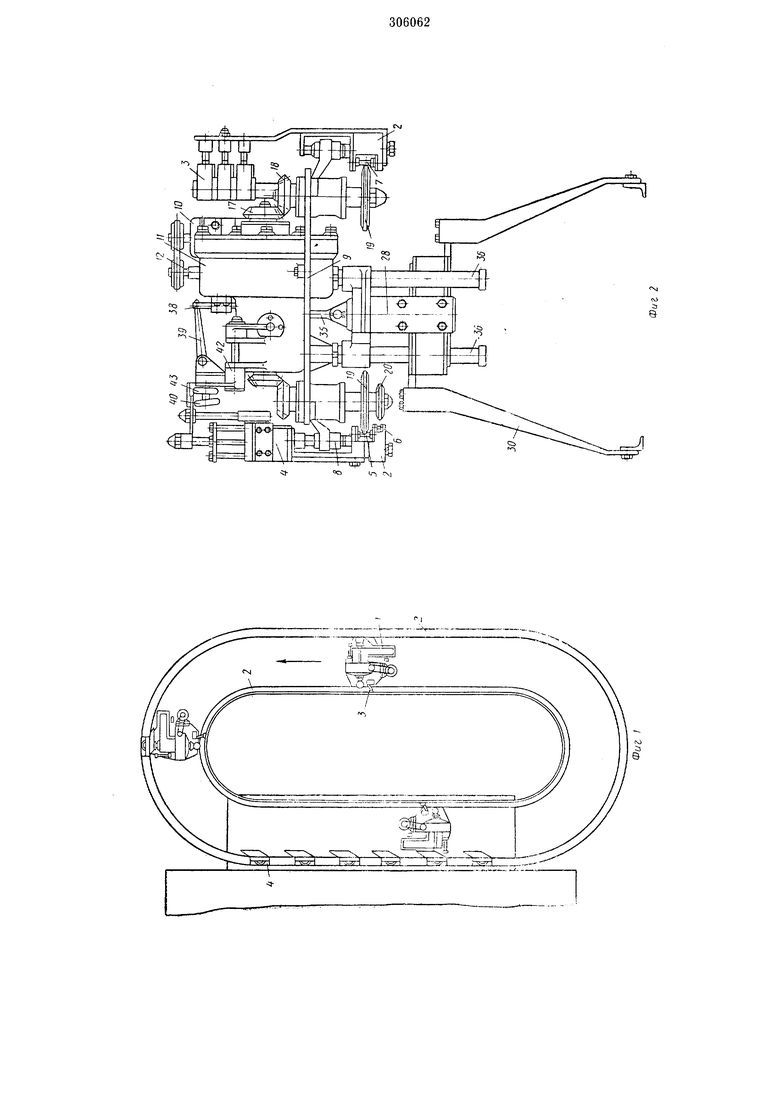
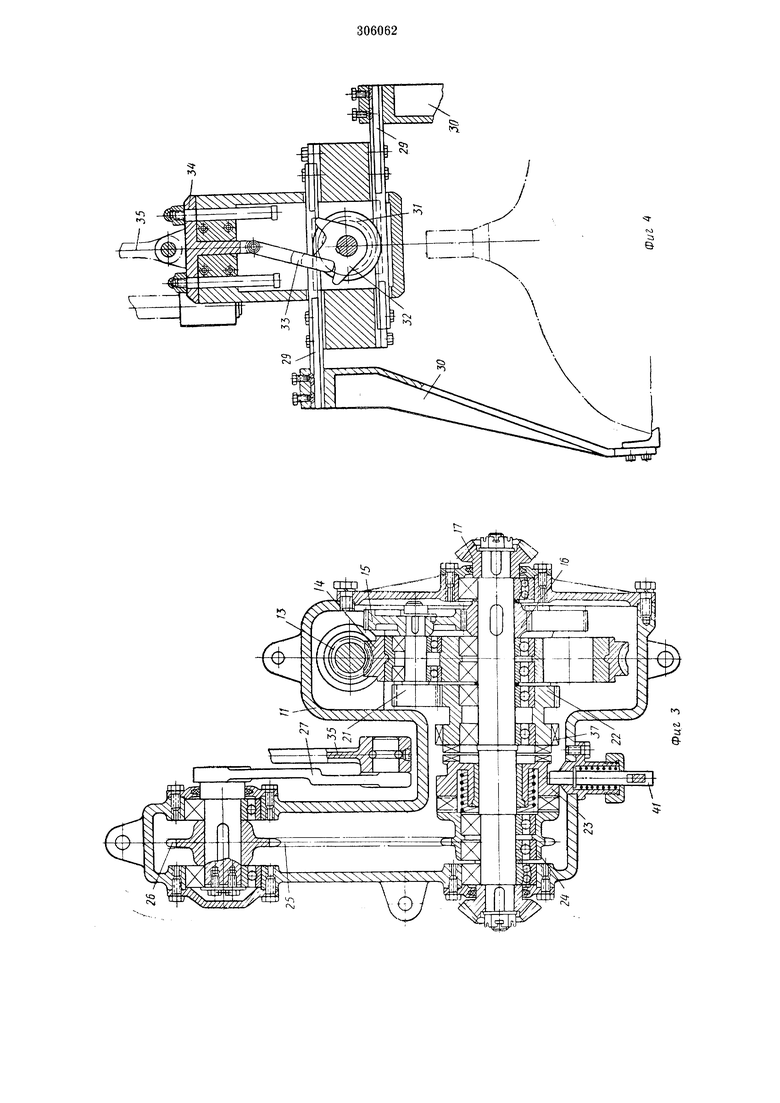
На фиг. 1 изобрал ено описываемое устройство, общий вид; на фиг. 2 - тележка, поперечный разрез; на фиг. 3 - то же, горизонтальный разрез; па фиг. 4 - грузозахватный
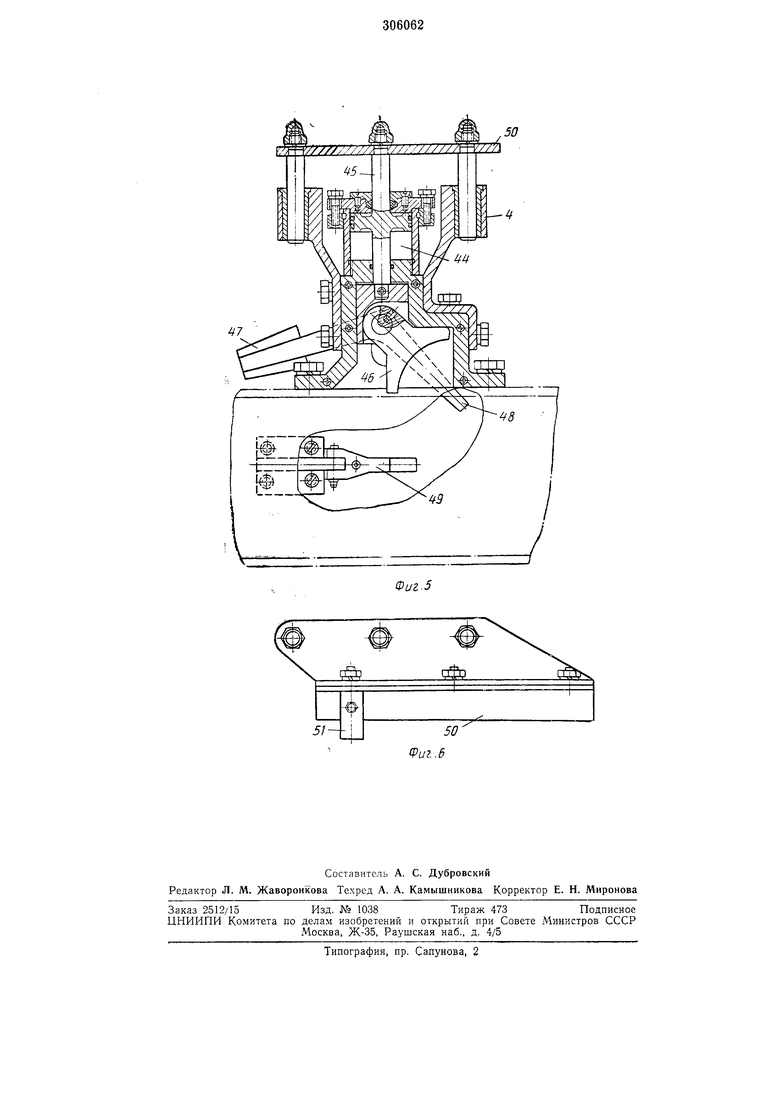
механизм, поперечный разрез; на фиг. 5 -командный механизм; на фиг. 6 - то же, вид сверху.
Тележки / установлены подвижно )ia направляющих 2 и снабжены токосъемниками
J. На направляющих закреплены командные механизмы 4. Внутренняя направляющая оборудована на прямолинейных участках трассы цепями о, на криволинейных участках - цепями 6, а внешняя направляющая
оборудована одно цепью 7.
Каждая тележка оборудована катками 8, которые смонтированы на плите 9. На этой плите установлен электродви1 атель 10, связанный иередачей с дифференциальным редуктором 11. Входной вал 12 редуктора через червяк 13 взаимодействует с червячным колесом-водилом 14, которое через большие сателлиты 15 и центральную шестерню /6 связано с коническими шестернями 17. Посскими шестернями 18, соосными с тяговыми звездочками 19. С цепью 6 на криволинейных участках трассы контактирует соосная звездочка 20. Малые сателлиты 21 взаимодействуют с центральной шестерней 22, которая через однооборотную муфту 23, звездочку 24, день 25 и звездочку 26 связана с кривошипом 27 кривошиино-шатунного механизма. Снизу на плите 9 смонтировано грузозахватное устройство 28, состоящее из двух подвижных реек 29 с захватами 30. Рейки контактируют с реечным колесом 31, которое через жестко связанный с ним кулачок 32 взаимодействует с толкателем 33, шарнирно связанным с траверсой 34, укрепленной на шатуне 35 кривошипно-шатунного механизма. 1 рузозахватпое устройство смонтировано подвижно вдоль вер тикальных ианравляющг|х 5feЦентрал-ьная шестерня 22 имеет шлицы,7, в которые при степорении 1нестерии входит шток 38, связанньш рычагом 39 с роликом 40. Палец 41 однооборотной муфты 2 через систему рычагов 42 связан с роликом 43. Командный механизм 4 вынолнен в виде пневмоцилиндра 44 с двусторонним штоком 45.Нижний конец штока связан с ловителем 46,который жестко связан с соосными ему рычагом с противовесом 47 и фиксируюшим рычагом 48, фиксируемым укреиленной на направляющих 2 защелкой 49. Верхний конец штока жестко связан с кулисой (нланкой) 50 с унором 5/. Во время движения тележки центральная шестерня 22 застопорена штоком 38. Крутящий момент от электродвигателя W через червяк 13, червячное колесо 14, сателлиты 15 и центральную шестерню 16 передается на конические шестерни 17, которые приводят во врап;епие звездочки 19 и 20. На прямых участках трассы с цепями 5 и 7 взаимодействуют звездочки 19, а па криволинейных участках трассы с цепями 6 и 7 - нравая звездочка 19 и звездочка 20. Для остановки тележки необходимо опустить ловитель 46 в крайнее пнжнее положение, нри этом каток 8 наезжает па него и тележка останавливается, а ловитель фиксируется в этом положении рычагом 48, который поворачивается вместе с ловнтелем и фиксируется защелкой 49. Одновременно ролик 40 наезжает на кулису 50 и через рычаг 39 и шток 38 освобождает центральную niecтерню 22. Унор 51 воздействует на ролик 43 и через систему рычагов включает однооборотнуЮ муфту 23, которая через ценную передачу поворачивает кривошип 27. Шатун 55 опускает грузозахватное устройство 28 по направляющим 36 до крайнего нижнего положения, носле чего траверса 34 толкателем 33 воздействует на кулачок 32 и поворачивает реечное колесо 31, воздействующее на рейки 29, раздвигая или сдвигая захваты 30. Затем сначала толкатель с траверсой, а потом все грузозахватное устройство поднимается в крайнее верхнее положение. В дальнейшем нри остановке тележки толкатель 33 воздействует на другую сторону кулачка, поворачивая его в иротивоноложную сторону, что вызывает обратный ход реек с захватами. В местах загрузки захваты сходятся, а в местах разгрузки расходятся. Для дальнейшего продвиження тележки необходимо поднять ловитель 46 вместе с фиксирующим рычагом 48, которые противовесом 47 разворачиваются против часовой стрелки. Одновременно освобождаются ролики 40 и 43, це1ггральная щестерня 22 застопоривается, и тележка вновь получает ход. Таким образом, тележка захватывает грузозахватным устройство:, груз в месте загрузки и опускает его в месте разгрузки, носле чего но замкнутым 1анравляющи м 2 вновь поступает к месту загрузки. Н р е д Л1 е I изобретения Устройство для захвата и распределе1 ия по рабочим местам штучных грузов, включаюniee подвижные по замкнутым направляющим тележки, оборудованные собственным приводом и грузозахватным механизмом и контактируюшие в местах загрузки и разгрузки с соответствующими командными механизмами, установленными па направляющих, отличающееся тем, что, с целью повышения эффективности работы устройства, привод каждои тележки выполпен в виде связанного с электродвигателем дифференциального редуктора, один выходной вал которого связан с тяговыми звездочками, установленными на тележке и взаимодействующими с закрепленными па направляющих цепями, а другой вал через однооборотную муфту, контактирующую с упорной плапкой командного механизма, п крнвошипно-шатунный механизм - с грузозахватным механизмом, который выполпен в виде реек с захватами, подвижных в противоположные стороны в горизонтальной плоскости н связанных с реечным колесом, взаимодействуюшпм через установленный на его оси кулачок с толкателем, шарнирно связанным с шатуном кривошипно-шатунного механизма, причем каждый командный меха низм выполнен в виде пневмоцилиндра с двусторонним штоком, один конец которого связан с фиксирующим тележку ловителем, а другой - с упорной планкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Станок для печатания фабричной марки, например, на меховых шкурках | 1957 |
|
SU114174A1 |
| Устройство для шлифования деталей из древесины | 1983 |
|
SU1135616A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Склад для длинномерных грузов | 1987 |
|
SU1472376A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| УСТРОЙСТВО ДЛЯ ОФСЬТНОЙ ПЕЧАТИ ЦИФРОВЫХ КОЛЕС | 1972 |
|
SU337794A1 |
| Ткацкий автомат для выработки бортовой ткани | 1960 |
|
SU137470A1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
30
