(54) СПОСОБ ВЫПРАВКИ ПУТИ В ПРОДОЛЬНОМ ПРОФИЛЕ И ПЛАНЕ
1
Изобретение относится к механизации и автоматизации работ п ремонту и теку1вему содержанию железнодорожного пути..
способ выправки желез но|(Орржного пути в плане, согласно которому определяют положение пути в олайе пичисляют программную стрелу ПО | еаультатам и выправляют путь tl3. .
Известен также способ выправки ПУТИ а продольном профиле и плане, заключаюцийся в том, что определяют положение пути в продольном профиле и плаие при помощи датчиков положения пути в продольном профиле и плаие, установленных на измерительных тележках, связанных единой базой изmetp&H«Mf проходящей по оси пути, и выф авляют путь
Недостатком известных способов является то, что погрешность измерения, неизбежно возника я в кривых за счет превышения одного реЛьса над другим, ничем не компенсируется, что не позволяет обеспечить качественную выправку пути./
Цель изобретения повышение качества выправки пути путем исключения влияния положения пути по уровню.
Для достижения этой цели определяют положение пути по уровню, по ме.- ньшей мере, в зоне выправки пути с помощью датчика уровня, а при выправке пути вносят поправку, пропорциональную сигналу с датчика уровня, в сигналы с датчиков положения пути
10 в продольном профиле и плане.
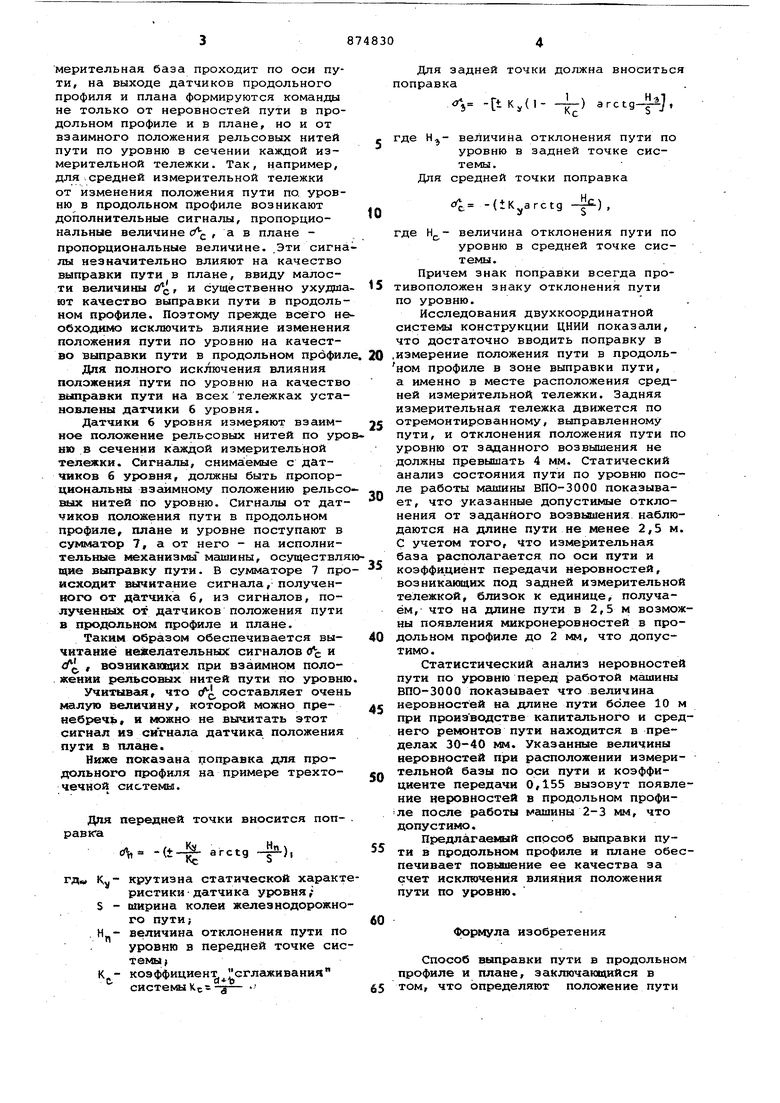
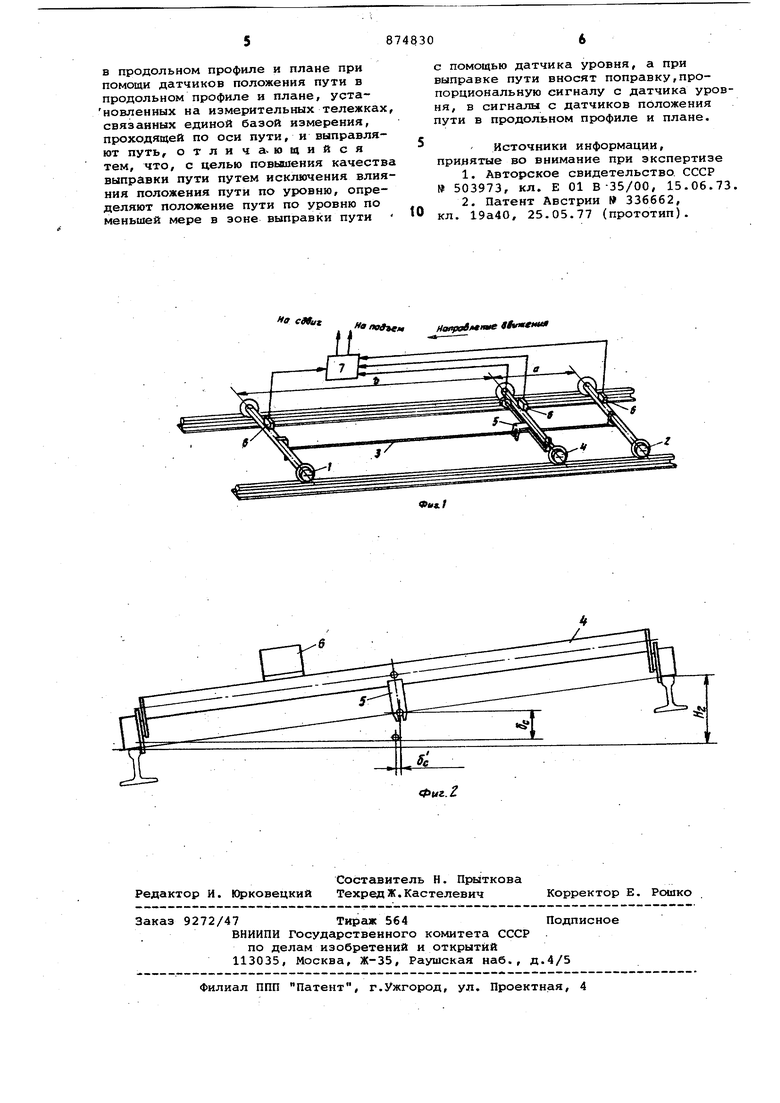
На фиг.1 представлена схема размещения измерительных тележек с датчиками; на фиг.2 - измерительная тележка.
15
йлправочная машина, например ВПО-3000 (не показана) , оснащается по меньшей мере, тремя измерительными тележками.
На тележках 1 и 2 закреплен трос
20 3, образующий измерительную базу. В качестве базы может быть использован луч.
На тележке 4 размещен измерительный механизм S с датчиками положе25ния пути в продольном профиле и плане.
Эти датчики измеряют перемещения тележки 4 относительно измерительной базы одновременно в продоль-, 30 -НОМ профиле и в плане. Так как измерительная база проходит по оси пути, на выходе датчиков продольного профиля и плана формируются команды не только от неровностей пути в продольном профиле и в плане, но и от взаимного положения рельсовых нитей пути по уровню в сечении каждой измерительной тележки. Так, например, дляiсредней измерительной тележки от изменения положения пути по. уровню в продольном профиле возникают дополнительные сигналы, пропорциональные величине , а в плане пропорциональные величине..Эти сигна лы незначительно влияют на качество выправки пути в плане, ввиду малости величины ое, и существенно ухудша ют качество выправки пути в продоль ном профиле. Поэтому прежде всего не обходимо исключить влияние изменения положения пути по уровню на качество выправки пути в продольном прбфил Для полного исключения влияния положения пути по уровню на качество выправки пути на всехтележках уста новлены датчики б уровня. Датчики 6 уровня измеряют взаимное положение рельсовых нитей по уро ню в сечении каждой измерительной тележки. Сигналы, снимаемые с датчиков б уровня, должны быть пропорциональны взаимному положению рельс вых нитей по уровню. Сигналы от дат чиков положения пути в продольном профиле, плане и уровне поступают в сумматор 7, а от него - на исполнительные механизмы мгиаины, ocstaecтвл &(ие выправку пути. В сумматоре 7 про исходит вычитание сигнала, полученного от датчика б, из сигналов, полученных от датчиков положения пути в продольном профиле и плане. Таким образом обеспечивается вычитание нежелательных сигналов J и f , возникающих при взаимном поло. женин рельсовых нитей пути по уровн Учитывая, что сЛ составляет очен малую величину, которой можно пренебречь, и можно не вычитать этот сигнал из сигнала датчика положения пути в плане. Ниже показана хюправка для продольного профиля на примере трехточечной системы. Для передней точки вносится поправкас -{±- arctg гдв, к,у- крутизна статической характ ристики датчика уровня , S - ширина колеи железнодорожно го пути; Н - величина отклонения пути по уровню в передней точке сис темы К - коэффициент сглсикивания системы Для задней точки должна вноситься поправка К(1- -4-) arctg-4 J, где величина отклонения пути по уровню в задней точке системы. Для средней точки поправка 0 -(iK arctg -5) , где Hj.- величина отклонения пути по уровню в средней точке системы. Причем знак поправки всегда противоположен знаку отклонения пути по уровню. Исследования двухкоординатной системы конструкции ЦНИИ показали, что достаточно вводить поправку в измерение положения пути в продольном профиле в зоне выправки пути, а именно в месте расположения средней измерительной тележки. Задняя измерительная тележка движется по отремонтированному, выправленному пути, и отклонения положения пути по уровню от заданного возвышения не должны превышать 4 мм. Статический анализ состояния пути по уровню после работы машины ВПО-3000 показывает, что указанные допустимые отклонения от заданного возвышения наблюдаются на длине пути не менее 2,5 м. С учетом того, что измерительная база располагается по оси пути и коэффициент передачи неровностей, возникакадих под задней измерительной тележкой, близок к единице, получаем, что на длине пути в 2,5 м возможны появления микронеровностей в продольном профиле до 2 мм, что допустимо. Статистический анализ неровностей пути по уровню перед работой машины ВПО-3000 показывает что величина неровностей на длине пути более 10 м при производстве капитального и среднего ремонтов пути находится в пределах 30-40 мм. Указанные величины неровностей при расположении измерительной базы по оси пути и коэффициенте передачи 0,155 вызовут появление неровностей в продольном профиле после работы мгицины 2-3 мм, что допустимо. Предлагаемый способ выправки пути в продольном профиле и плане обеспечивает повьтюние ее качества за счет исключения влияния положения пути по уровню. Формула изобретения Способ выправки пути в продольном профиле и плане, заключающийся в том, что определяют положение пути
в продольном профиле и плане при помощи датчиков положения пути в продольном профиле и плане, установленных на измерительных тележках, связанных единой базой измерения, проходящей по оси пути, и выправляют путь, отлича. ющийся тем, что, с целью повышения качества выправки пути путем исключения влияния положения пути по уровню, определяют положение пути по уровню по меньшей мере в зоне выправки пути
с помощью датчика уровня, а при выправке пути вносят поправку,пропорциональную сигналу с датчика уровня, в сигналы с датчиков положения пути в продольном профиле и плане.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР
503973, кл. Е 01 В-35/00, 15.06.73.
2.Патент Австрии I 336662, кл. 19а40, 25.05.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Устройство для управления выправкой железнодорожного пути в продольном профиле | 1985 |
|
SU1255670A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| МАШИНА ДЛЯ ВЫПРАВКИ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2097471C1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| Устройство для выправки железнодорожного пути в вертикальной плоскости | 1981 |
|
SU1057596A1 |
cMoz опаОъем НапраЛмняе
