(54) УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОйОРОЖНОГО ПУТИ



| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство машины для выправки железнодорожного пути | 1979 |
|
SU787542A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| Устройство управления исполнительным органом путевой машины | 1982 |
|
SU1023020A1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| Измерительное устройство машины для выправки железнодорожного пути | 1990 |
|
SU1693156A1 |
| Измерительная система устройства для выправки железнодорожного пути | 1985 |
|
SU1310465A1 |
| Устройство для выправки железнодорожного пути | 1979 |
|
SU918376A1 |
| Путевая машина | 1971 |
|
SU667622A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
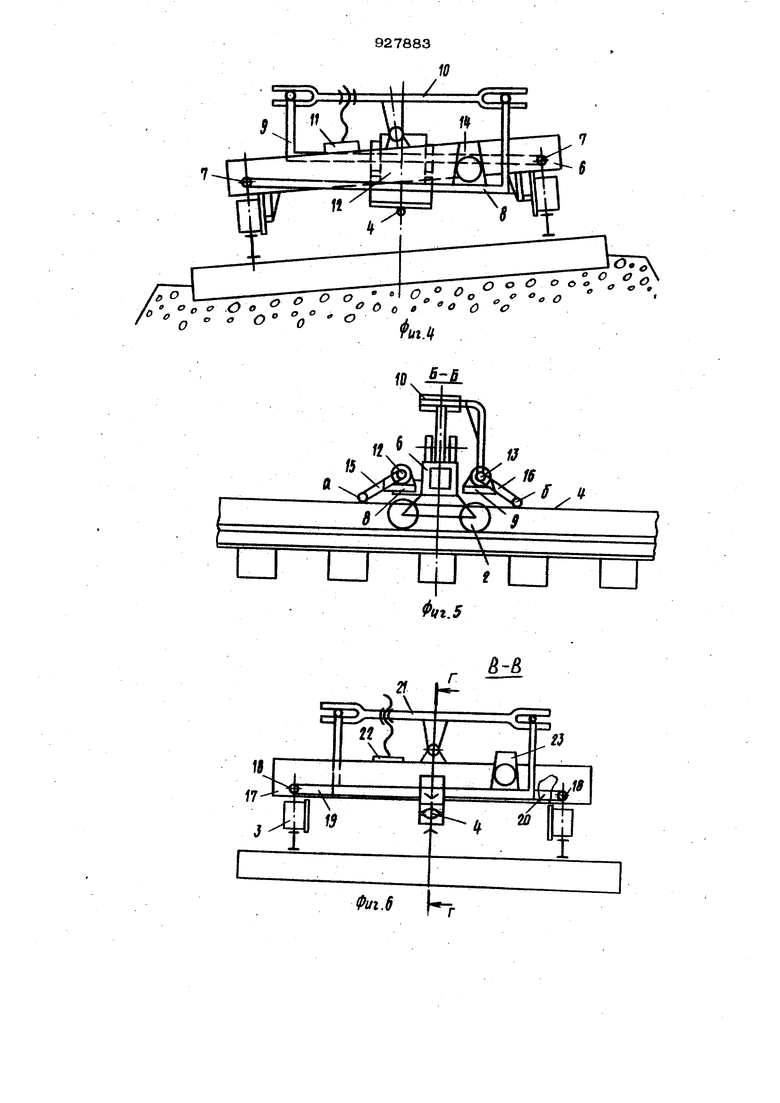

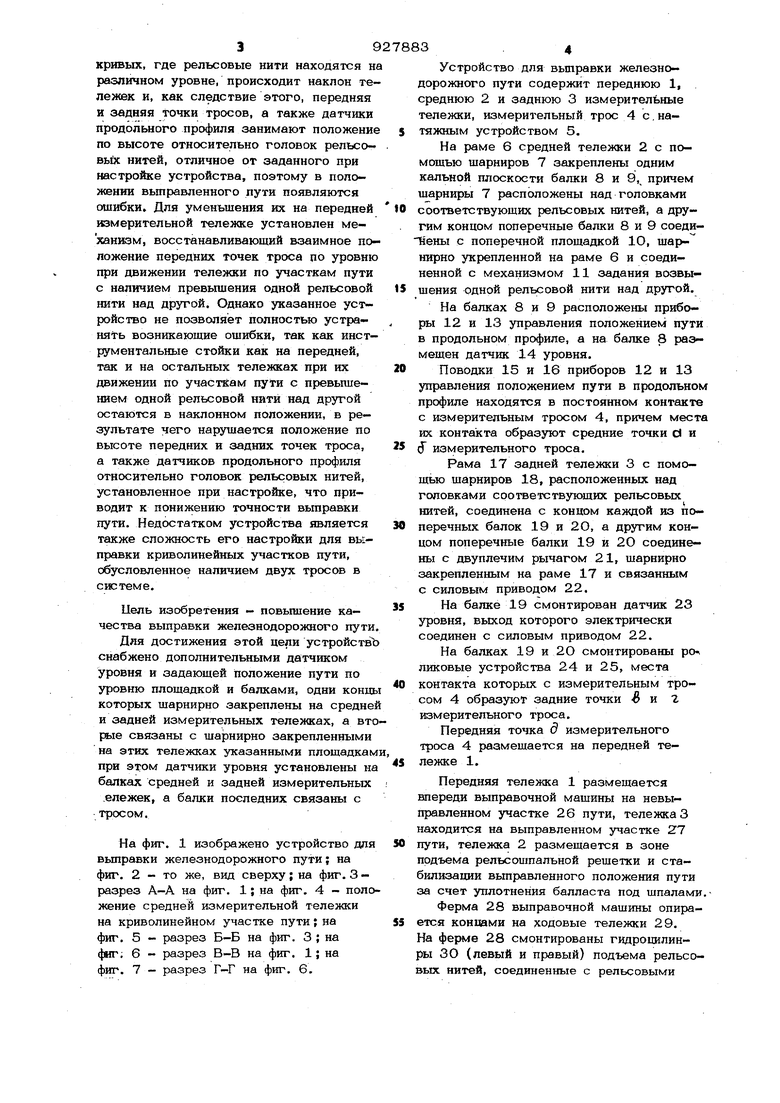
Изобретение относится к строительству и ремонту жепезнодорюжного пути и предназначено для использования в системах автоматического управления рабочими органами путевых машии при осуществ лении ими процесса выправки железнодорожного пути. Известно устройство для выправки железнодорожного пути, содержащее три измерительные тележки, на которых смонтированы системы отсчета и датчики положения пути в продольном профиле, причем на средней тележке щарнирно закреплена задающая положеиие пути площадка, несущая датчик уровня-. Управление выправкой ведущей рельсовой нити, т. е. внутренней рельсовой нити криволинейного участка пути и ее продолжения на прямых участках, осуществляется по командным сигналам, вырабатываемым системой вы- правки, а постановка ведомой рельсовой нити в необходимое положение выполняется по управляющим сигналам, выраба- датчиком уровня { , Недостаттсамн устройства являются жесткое крепление инструментальных стоек на средней и задней рельсовых тележках, что приводит к понижению точности вьтравки участков пути с наличи на них превыщения одной рельсовой нити над другой (переходные и круговые криволинейные участки), а также необходимость перенастройки системы при изменении направления кривизны выправляемого участка. Известно устройство для вьшравкн желез нодорожного пути, содержащее три измерительные тележки, связанные тросом, механизм вьшравки пути в продольном профиле, прибор управления механизмом выправки, включающий смонтированные на тележках задающую положение пути по уровню площадку и датчик уровня, связанный с тросом и механизмом выправки пути 2j . При движении передней тележки по невьшравленному пути, а также при движении тележек в переходных и круговых 39 кривых, где рельсовые нити находятся н различном уровне, происходит наклон тележек и, как следствие этого, передняя и задняя точки тросов, а также датчики продольного профиля занимают положение по высоте относительно головок рельсовьйс нитей, отличное от заданного при настройке устройства, поэтому в положении вьшравленного пути появляются ошибки. Для уменьшения их на передней измерительной тележке установлен механизм, восстанавливающий взаимное положение передних точек троса по уровню при движении тележки по участкам пути с наличием превышения одной рельсовой нити над другой. Однако указанное устройство не позволяет полностью устранять возникающие ошибки, так как инструментальные стойки как на передней, так и на остальных тележках при их даижении по участкам пути с превьпиением одной рельсовой нити над другой остаются в наклонном положении, в результате чего нарушается положение по высоте передних и задних точек троса, а также датчиков продольного профиля относительно головок рельсовых нитей, установленное при настройке, что приводит к понижению точности вьшравки пути. Недостатком устройства является также сложность его настройки для выправки криволинейных участков пути, обусловленное наличием двух тросов в системе. Цель изобретения - повьпиение качества выправки железнодорожного пути Для достижения этой цели устройствЪ снабжено дополнительными датчиком уровня и задающей положение пути по уровню площадкой и балками, одни концы которых шарнирно закреплены на средне и задней измерительных тележках, а вто рые связаны с шарнирно закрепленными на этих тележках указанными площадкам при этом датчики уровня установлены на балках средней и задней измерительных .ележек, а балки последних связаны с трюсом. На фиг. 1 изображено устройство для вьшравки железнодорожного пути; на фиг. 2 - то же, вид сверху; на фиг. 3 разрез А-А на фиг. 1; на фиг. 4 - поло жение средней измерительной тележки на крнволинейном участке пути; на фиг. 5 - разрез Б-Б на фиг. 3 ; на фиг, б - разрез В-В на фиг. 1; на фиг. 7 - разрез Г-Г на фиг. 6. 3 Устройство для вьшравки железнодорожного пути содержит переднюю 1, среднюю 2 и заднюю 3 измерительные тележки, измерительный трос 4 с, натяжным устройством 5. На раме 6 средней тележки 2 с помощью шарниров 7 закреплены одним кальной плоскости балки 8 и 9, причем шарниры 7 расположены над головками соответствующих рельсовых нитей, а другим концом поперечные балки 8 и 9 соедиНены с поперечной площадкой 10, шарнирно укрепленной на раме 6 и соединенной с механизмом 11 задания возвышения одной рельсовой нити над другой. На балках 8 и 9 расположены приборы 12 и 13 управления положением пути в продольном профиле, а на балке 8 размещен датчик 14 уровня. Поводки 15 и 16 приборов 12 и 13 управления положением пути в продольном профиле находятся в постоянном контакте с измерительным тросом 4, причем места их контакта образуют средние точки d и (Г измерительного троса. Рама 17 задней тележки 3 с помощью шарниров 18, расположенных над головками соответствующих рельсовых нитей, соединена с концом каждой из поперечных балок 19 и 2О, а другим концом поперечные балки 19 и 20 соединены с двуплечим рычагом 21, шарнирно закрепленным на раме 17 и связанным с силовым приводом 22. На балке 19 смонтирован датчик 23 уровня, выход которого электрически соединен с силовым приводом 22. На балках 19 и 2О смонтированы ро-. ликовые устройства 24 и 25, места контакта которых с измерительным тросом 4 образуют задние точки и 2 измерительного троса. Передняя точка д измерительного троса 4 размещается на передней тележке 1. Передняя тележка 1 размещается впереди выправочной машины на невыправленном участке 26 пути, тележкаЗ находится на выправленном участке 27 пути, тележка 2 размещается в зоне подъема рельсошпальной решетки и стабилизации выправленного положения пути за счет уплотнения балласта под шпалами.Ферма 28 выправочной машины опирается концами на ходовые тележки 29. На ферме 28 смонтированы гидроцилинры ЗО (левый и правый) подъема рельсовых нитей, соединенные с рельсовыми захватами 31. Подбивочный блок 32 уплотнения балласта под шпалами размгацен в зоне подъемки рельсошпальной решетки и контроля ее поднятого положения. Перед началом работы устройства для вьшравки железнодорожного пути настраи вают на прямом участке пути. При этом балки 8 и 9, р азмешенные на тележке 2 и балки 19 и 2О, расположенные на тележке 3,занимают горизонтальное положение, при котором датчики 14 и 23 уровня управляющего сигнала не вырабатывают, а приборы 12 и 13 управлени положением пути в продольном профиле и задние точки в и 2 измерительного троса занимают вполне определенное положение по высоте относительно головок рельсовых нитей. Процесс выправки при движении выправочной машины вдоль железнодорожного пути вначале по прямому, а затем по криволинейному участкам, на которых например, левая рельсовая нить является ведущей (ведущая рельсовая нить - это внутренняя рельсовая нить криволинейного участка пути и ее продолжение на прямых участках), осуществляется следующим образом. При наличии на ведущей рельсовой нити прямого участка пути неровности в зоне расположения тележки 2 взаимное положение измерительного троса 4 в средней его точке d и поводка 15 прибора 12 управления положением пути в продольном профиле (прибор 13 управления положением пути в продольном профиле из работы при этом выключен) в сравнении с их положением при настройке изменяется: поводок 15 поворачивается на некоторый угол вокруг своей оси, в результате чего прибор 12 управления положением пути в продольном профиле вырабатывает, управляххиий сигнал, под воздействием которого гид1К -. шшикдр 30, в данном случае, например, левый, через рельсовый захват 31 перемещает ведущую рельсовую нить в верти кальной плоскости и ставит ее, по высот в положение, задаваемое устройством дл выправки, т. е. когда восстанавливается взаимное положение измерительного tftoса 4 и поводка 15, заданное при настро ке, при котором выработка управляющее сигнала прибором 12 управления прекращается. При наличии на ведомой рельсовой нити неровности в зоне расположения теЦ 836 , лежки 2 ее рама 6 перекаш1тается, балки 8 и 9 отклоняются от горизонталъгного положения, заданного при настройке, в результате чего датчик 14 уровня выоабатывает управляющий сигнал, под воздействием которого гидроцилиндр 30, в данном случае правый, через рельсовый захват 31 перемещает ведомую рельс о- вую нить в вертикальной плоскости на величину, соответствующую устранению неровности, при которой восстанавливается горизонтальное положение балок 8 и 9. Балки 19 и 20 тележки 3 при ее движении по прямому вьшравленному участку пути находятся в одном уровне и в работе участвует задняя точка , в отношении которой осуществляется фиксация измерительного троса. Таким образом,, при выправке прямого учас-пса пути приборы управления положением пути в продольном профиле и задние точки измерительного троса в отношении головки ведущей рельсовой нити сохраняют положение по высоте, , заданное при настройке устройства для выправки, а балки 8 и 9, 19 и 2О удерживаются в горизонтальном положении. При выпрвке криволинейного участка цути перемещение ведущей рельсовой нити в вертикальной плоскости для ее постановки в положение, определяемое устройством для выправки, происходит таким образом, как и при вьтравке прямого участка. Для управления перемещением в вертикальной плоскости ведомой рельсовой нити на участке переходной работу включается механизм 11 задания возвышения одной рельсовой нити над другой, который через плошадку 1О, задающую положение пути по уровню, перекашивает бапки 8 и 9 на величину, соответствующую проектному возвышению ведомой рельсовой нити над ведущей в любой точке переходной кривой. Перекос балок 8 и 9 обуславливает датчик 14 уровня, вырабатывакший управляющий сигнал, под воздействием которого правый гндроцилиидр ЗО через рельсовое захваты 31 перемещает в вертикальной плоскости ведомую рельсовую нить на величину соответствующую ее заданному положению, при котором датчик 14 уровня прекращает выработку управляющего сигнала, а балки 8 и 9 при этом занимают горизонтальное положение. В связи с тем, что рассмотренный процесс происходит непрерывно. обеспечивается постановка ведомой релъ совой нити переходной кривой в заданно положение на всем ее протяжении. После окончания выправки переходно кривой работа механизма 11 задания в выгления одной рельсовой нити над другой прекращается. В конце переходной и начале радиусной кривой рама 6 тележки 2 перекошена на величину, определяемую заданным возвьпиением ведомой рельсовой нити над ведущей, а балк 8 и 9 при этом занимают горизонтальн прложение (фиг. 4, показано положение средней телехоси 2 на криволинейном участке пути). Управление постановкой ведущей рел совой нити на участке круговой кривой в положение, задаваемое устройством для выправки, выполняется таким же образом, как и на первом участке. Управление постановкой в заданное положение ведомой рельсовой нити на участке круговой кривой выполняется за счет удержания соответствия наклона рамы 6 тележки 2 ее наклону в конце переходной и начале круговой кривой. При движении тележки 3 в переходных и круговых кривых ее рама 17 перекашивается. Это вызывает оталонение поперечных балок 19 и 2О от горизонтального положения, в результате чего датчик 23 уровня вырабатывает управляющий сигнал, под воздействием которого силовой привод 22 через двуплечи рвьтчаг 21 поворачивает балки 19 и 2О и восстанавливает их горизонтальное положение. При этом в работе участвует задняя точка 1 измерительного троса 4 и ее положение по высоте относительно головки ведущей рельсовой нити удерживается постоянным вне зависимости от величины возвьшения ведомой рельсово нити над ведущей и равным тому положению, которое ей задается при настро ке. Стабилизация выправленного положения пути на прямьгх и криволинейных участках выполняемся посредством уплотнения балласта под рельсошпальной решеткой подбивочным блоком 23. При изменении направления кривой ведущей рельсовой нитью оказывается правая рельсовая нить, поэтому в работе участвует прибор 13 управления положением пути в продольном профиле, смонтированный на балке 9, а второй прибор 12 управления положением пути В продольном профиле из работы выключается, при эгом на тележке 3 в работе участвует задняя точка -S измерительного троса. В процессе выправки прямых и криволинейных участков пути балки 8 и 9, 19 и 2О постоянно удерживаются в горизонтальном положении, а приборы управления положением пути в продольном профиле и задние точки измерительного троса, находящиеся в работе, постоянно .занимают положение по высоте относительно головки ведущей рельсовой нити в соответствии с заданным им положением при настройке системы. Сохранение при выправке прямых и криволинейных участков пути постоянного, заданного при настройке положения по высоте приборов управления положением пути в продольном профиле и задних точек измерительного троса, находящихся в работе относительно головки ведущей рельсовой нити повышает точность выправки пути. В то же время (переход выправки с прямых участков на криволинейные любого направления тросовой системы уменьшает трудоемкость ее настройки. Наличие одного измерительного троса значительно упрощает устройство. Таким образом, изобретение позволяет повысить качество вьшравки пути, упростить устройство и уменьшить трудоемкость его настройки. Годовой экономический эффект от внедрения одного устройства составит 636 руб на 1км выправленного пути. Формул аи зобретения Устройство для вьтравки железнодорожного пути, содержащее три измерительные тележки, связанные тросом, ме ханизм вьшравки пути в продольном профиле, прибор управления механизмом выправки, включающий в себя смонтированные на тележках задающую положение пути по уровню площадку и датчик уровня, связанный с тросом и механизмом вьшравки пути, отличающееся тем, что, с 1№лью повышения качества вьшравки железнодорожного пути, оно снабжено дополнительными датчиком уровня и задающей положение пути по уровню площадкой и балками, одни концы которых шарнирно закреплены на средней и задней измерительных тележках, а вторые связаны с шарнирно закрепленными на этих тележках указанными площадками, при этом датчики уровня уст новлены на балках средней и задней из9мерительных тележках, а балки последних связаны с тросом. Источники информации, принятые во внимание при экспертнсзе 927883lO ,1. Патент Австрии № 312655, кл. 19а 40, 10.О1 74, 2. Патент Австрии № 32197О, кл. 19а 40,25.04; 75 (прототип).
ФпЛ
W. JbL
Фиг.6 j
Г-Г
9
ег
ш
