1
Изобретение относится к автоматизации технологических процессов и может быть использовано для управления реверсивным мexaниз лoм, приводящим в движение различные раздаточные и дозировочные тележки.
Известно устройство для дистанционного управления реверсивным мехаН1ЯЗМОМ, содержащее датчики положения, реле управления, кнопки управления и обмотки управления реверсивного механизма , 1 .
Однако данное устройство рассчитано только на ряд фиксированных положений исполнительного механизма. Не обеспечивается автоматический возврат тележки в исходное положение под следующую загрузку и изменение скорости кюханизма.
Наиболее близким по технической сущности к предлагаемому является устройство, у которого привод выполнен двухскоростным, а в зоне разгрузки установлен упор и дополнительный, конечный выключатель, переключакиций скорость привода на замедленную. Известное устройство используется для поднятия мелкосыпучих и сыпучих грузов и транспортирования их вначале
по вертикали, а затем по горизонтали с последующей выгрузкой в бункер 2
Однакр использование известного устройства возможно только для транспортирования груза с позиции загрузки до одного и того же места выгрузки.
Цель изобретения - расширение функциональных возможностей устрой10ства.
Указанная цель достигается тем, что в устройство, содержащее датчики положения механизма, реле управления скоростью и реле управления реверсом
15 введены реле вызова линии, причем выход каждого датчика положения меха низма через соответствующий замыкающий контакт реле вызова своей линии соединен с обмоткой реле управления реверсоМг а через соответствующий за
20 мыканяций контакт реле вызова последующей линии - с обмоткой реле управ ления скоростью.
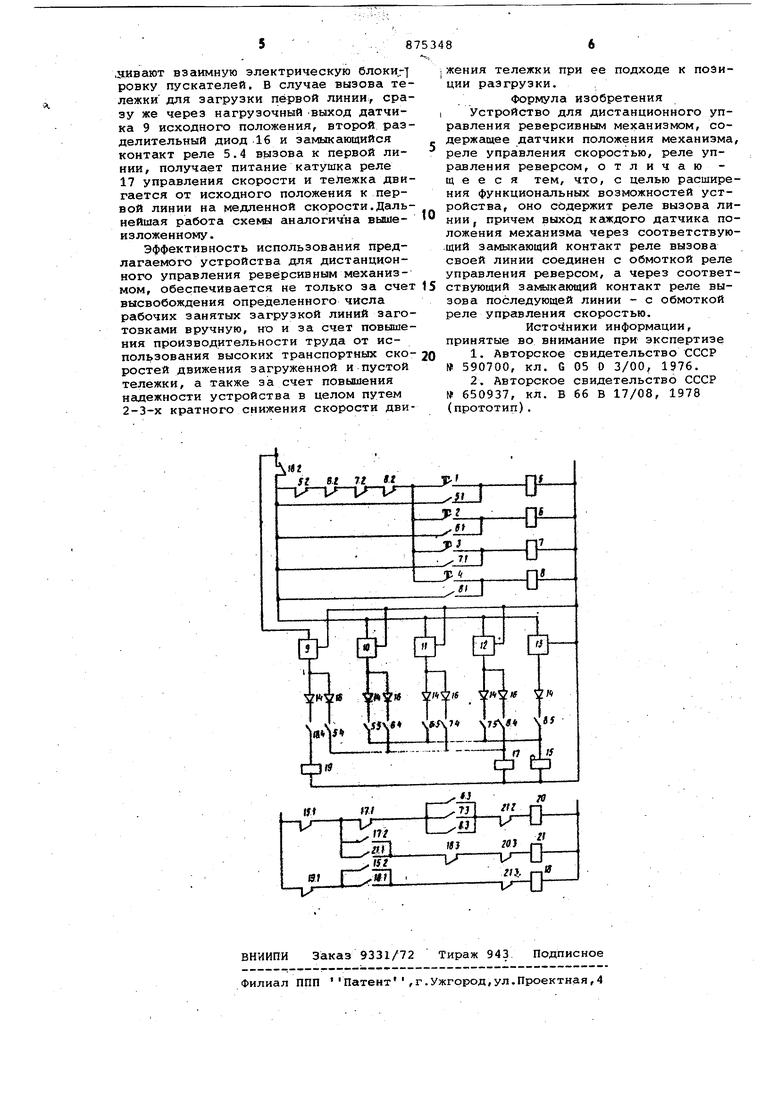
На чертеже представлена электри25ческая схема устройства для дистанционного управления реверсивным меха низмом, обеспечивающего загрузку четырех технологических линий.
Устройство состоит из кнопок 1,2, 3 и 4 вызова, расположенных у каждой
30
инии, реле 5,6,7,8 вызовов линии и х контактов 5,1,5,2... 5,5,6,1 и .д., обеспечивающих работу устройтва, датчика 9 исходного положения Ьханиэма, датчиков ,12 и 13 положения механизма на позициях разгрузки у каждой линии. Нагрузочный ыход каждого из датчиков 10,11,12 и 13 положения подсоединен через перый разделительный диод 14 и замыкаюЯИЙСЯ контакт реле вызова своей линии к обмотке реле 15 управления реверсом, а через второй разделительный диод 16 и замыкающийся контакт реле вызова последующей по ходу двиения линии к обмотке реле 17 управения скоростью.
Нагрузочный выход датчика 9 исодного положения через первый разелительный 14 и занюкающийся онтакт магнидного-пускателя 18,управляющего реверсом привода тележки на быстрой скорости, подсоединен к обмотке реле 19, обеспечивающего останов тележки в Исходном положении.
Контакты реле.5,б,7 и 8 вызова и реле 15,17 и 19 обеспечивают соответствующее управление катушки магнитных пускателей привода тележки: пускателя 20 вперед бУютро; пускателя 21 вперед медленно; пускателя 18 реверс быстро.
Предлагаемое устройство рассчитано на управление раздаточной тележкой, загружаемой в исходном положении мерной порцией сыпучего мелкоштучного полуфаб 1иката с последующей транспортировкой и разгрузкой на ходу в приемное устройство той тёхнолЬгической линии,с которой последовал вызов, после этогсэ тележка автоматически реверсируется, возвращается в исходное положение и становится под повторную загрузку полуфабрикатом.
Предлагаемое устройство предназначено обслуживать несколько расположенных в ряд линий, осуществлякяцих определенные технологические операции обработки полуфабриката. При этом, чтобы сократить время исполнения команды, транспортная скорость тележки выбрана достаточно высокой, а чтобы обеспечить разгрузку тележки на ходу, скорость ее снижена до того предела, при котором сохраняется надежная работа механизма открывания дна тележки.
Устройство для дистанционного управления реверсивным механизмом работает следующим образом.
Предположим, что необходимо произвести загрузку порцией заготовок приемного устройства третьей линии. При нажатии на кнопку вызова 3 третьей линии получает питание реле 7 вызова, которое через свои контакты 7.1 становится на самопитаниё, а 7.2 блокирует вызов тележки к другим линиям.. Замкнувшийся контакт 7.3 подает напряжение на катушку магнитного пускателя 20, включающего привод тележки на большую скорость. Тележка на транспортной скорости двигается до датчика 11 положения второй линии. При взаимодействии флажка тележки с датчиком 11 положения, он срабатывает и через его нагрузочный выход, второй разделительный диод 16 и замкнувшийся контакт реле 7.4 вызова подается напряжение на катушку реле 17 управления скорости привода тележки. Разомкнувшийся контакт 17.1 обесточивает катушку магнитного пускателя 20, а замкнувшийся контакт 17.2 подает напряжение на катушку магнитного пускателя 21, обеспечивающего включение привода тележки на медленную скорость.
Пускатель 21 своим замкнувшимся контактом 21.1 становится на самопитание, а размыкающими контактами 21. и 21.3 блокирует включение катушек магнитных пускателей 18 и 20.
Тележка на медленной скорости движется от второй линии к третьей. При подходе к приемному устройству третьей линии происходит автоматическая разгрузка тележки, а при последующем взаимодействии флажка тележки с датчиком 12 положения, через его нагрузочный выход, первый разделительный диод 14 и замкнувшийся контакт реле 7.5 вызова подается напряжение на катушку реле .15, управления реверсом привода тележки. Реле 15, получив питание своим размыкающимся контактом 15.1 обесточивает цепь питания катушки магнитного пускателя 21, а замкнувшимся контактом 15.2 подается напряжение на катушку пускателя 18.
Пускатель 18, замкнувшимся контактом 18.1 становится на самопитание и обеспечивает реверс привода тележки. Разомкнувшийся контакт 18.2 в цепи питания датчиков положения и всех реле вызова исключает возможность вызова тележки на позицию загрузки при ее движении к исходному положению на транспортной скорости. При подходе тележки к датчику 9 исходного положения последний срабатывает и через его нагрузочный выход, первый разделительный диод 14, замкнутый контакт 18.4 подается напряжение на катушку реле 19 получив питание, своим размыкающим контактом 19. обесточивает катушку магнитного пускателя 18, привод тележки отключается и она останавливается в исходном положении, при этом контактом 18.4 снимается напряжение питания с катушки реле 19 управления, в исходном положении происходит автоматическая загрузка тележки новой порцией заготовок и схема реверсивного устройства вновь подготовлена к очередно ..вызову. Контакты 18.3 и 20.3 обеспе
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1024882A2 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1982 |
|
SU1174905A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для управления реверсивным электроприводом | 1987 |
|
SU1515307A1 |
| Устройство для дистанционного управления транспортным комплексом | 1974 |
|
SU553712A1 |
| Способ управления движением подвижных составов на участке шлюзования и устройство для его осуществления | 1987 |
|
SU1520250A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
