Изобретение относится к автоматизации технологических процессов и может быть использовано для управления реверсивным механизмом, приводящим в движение различные раздаточные и дозирующие тележки.
По основному авт.св. № 875348 избестно устройство для дистанционного управления реверсивным механизмом, содержащее датчики положения механизма, реле управления скоростью, реле управления реверсом и реле вызова линии, причем выход каждого датчика положения механизма через соответствующий замыкающийконтакт реле вызова своей линии соединен с обмоткой реле управления реверсом, а через соответствукнций замыкающий контакт реле вызова последующей линии с обмоткой реле управления скоростью |13 .
к недостаткам известного устройства относится невозможность запоминания сигналов о последующих вызовах тележки к другим линиям во время исполнения очередной команды; вызов тележки запоминается и исполняется только к той линии, у которой первой была нажата кнопка вызова. Все это отвлекает обслуживающий персонал.
заставляет .обращать внимание на местоположение раздаточной тележки перед производством вызова. Кроме того, устройство рассчитано на обслуживание определенного числа линий, расположенных по одну сторону от места разгрузки, что.также снижает производительность труда, несмотря навы10сокие транспортные скорости тележки, из-за значительного расстояния от места загрузки до последних линий.
Цель изобретения - расширение области применения устройства.
15
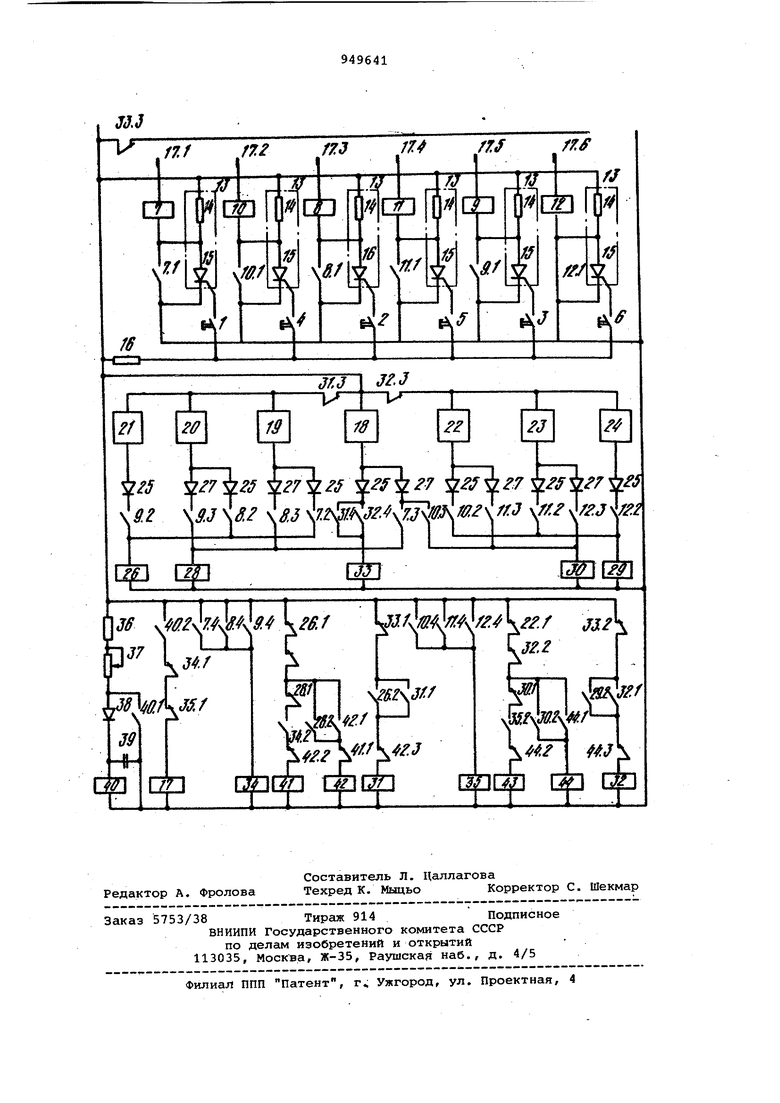
Поставленная цель достигается тем, что в известное устройство введены шаговый искатель и ячейки памяти, причем первый вывод обмотки каждого реле вызова линии через соот20ветствующий контакт шагового искателя подключен к одному полюсу источника питания, второй вывод обмотки каждого реле вызова линии .подключен к первому выводу соответствую25щей ячейки памяти, через свой замыкающий контакт - ко второму полюсу источника питания и ко второму выводу ячейки памяти, третий вывод которой соединен с першам полюсом ис30точника питания, а четвертый вывел через соответствующую кнопку вызова с первым полюсом источника питания. Каждая ячейка памяти выполнена в виде последовательно соединенных резистивного элемента и тиристора, причем точка соединения первого вывода резистивного элемента и анода тиристора подключена к первому выводу ячейки памяти, второй .вывод резистивного элемента подключен к третьему выводу ячейки памяти, второй вывод которой соединен с катодом тиристора, а четвертый вывод с управляющим входом тиристора. На чертеже представлена электрическая схема устройства для дистанционного управления реверсивным механизмом, обеспечивающим загрузку шести автоматических линий, трех расположенных слева от исходного положения механизма (места загрузки тележки), и трех - справа. Устройство состоит из кнопок 1-6 вызова, расположенных у каждой линии, реле 7-12 вызовов линий и их контактов, например 7,1, 7,2, 7,3, 7,4; 8,1 и т,д,, обеспечивающих работу устройства, ячеек 13 памяти, состоящих из ограничительного резис тора 12 и тиристора 15, обеспечиваю щих функцию запоминания произведенной команды вызова, резистора 16 управления, общего для всех ячеек памяти, шагового искателя 17 и его контактов 17,1, 17,2, и т,д., обесп чивающего опрос линий в определенной последовательности, датчика 18 исходного положения механизма, датчиков 19-21 положения механизма на позициях разгрузки у каждой линии для линий, расположенных слева от места загрузки, и 22-24 - для линий справа. Нагрузочный выход каждого из датчиков 19-21 положения подсоединен через первый разделительный диод 25 и замцкающийс я контакт реле вызова.своей линии к обмотке реле 26 управления реверсом, а через вто рой разделительный диод 27 и замыкающийся контакт реле вызова последующей по ходу движения линий - к обмотке реле 28 управления скорость Нагрузочный выход каждого из дат чиков 22-24 для линий, расположенных сп)ава от исходного положения механизма, подсоединен через первый разделительный диод 25 и замыкающий ся контакт реле вызова своей линии к обМотке реле 29 управления реверсом, а.. через второй разделительный диод 27 и замыкающийся контакт реле вызова последующей по ходу движени линии - к обмотке реле 30 управления скоростью. Нагрузочный выход датчика 18 ис ходного положения через первый разделительный диод 25 и замыкающие контакты 31,4 и 32.4 магнитных пус кателей 31 (осуществляет реверс привода тележки при движении ее к линиям, расположенным слева от исходного положения механизма) и 32 (осуществляет реверс привода тележки при движении ее к линиям, расположенным справа от исходного положения) подсоединен к обмотке реле 33, обеспечивающего останов тележки в исходном положении и возврат элементов схемы в первоначальное состояние, а через второй разделительный диод 27 и параллельные замыкающие контакты 7,3 и 10.3 реле вызова - к первым линиям слева и справа, соответственно к обмотке реле 28 управления скоростью при движении тележки влево и обмотке реле 30 управления скоростью при движении тележки вправо. Контакты 7.4, 8,4 и 9.4 реле вызовов обеспечивают подачу напряжения на катушку промежуточного реле 34 при вызове тележки к линиям, расположенным слева от исходного положения механизма, а контакты 10.4, 11.4 и 12,4 - подачу напряжения на катушку промежуточного реле 35 при вызове тележки к линиям, расположенным справа от исходного положения. Ограничительный резистор 36, резистор 37, диод 38 и конденсатор 39 обеспечивают импульсное включение промежуточного реле 40, замыкающийся контакт которого 40,2 осуществляет управление шаговым искателем 17, производящим поиск линии, на которую произведен вызов. Размыкающиеся контакты 34,1 или 35,1 промежуточных реле 34 и 35 обеспечивают останов шагового искателя 17 и исполнение команды при обнаружении вызова на линию с любой стороны. Контакты реле 26, 28-34 и 35 обеспечивают соответствующее управление катушками магнитных пускателей привода тележки: пускателя 41 влево - быстро; пускателя 42 влево - медленно; пускателя 31 реверс - быстро от линий,расположенных слева; пускателя 43 вправо - быстро; пускателя 44 вправо медленно; пускателя 32 реверс - быстро от линий, расположенных справа. : Катушки реле 7-12 вызовов линий подключены t к контактам шагового искателя так, чтобы обеспечить запрос в следующей последовательности: первая линия слева, реле 7; первая линия справа, реле 10; вторая линия слева, реле 8; вторая линия справа, реле 11; третья линия справа, реле 9; третья линия справа, реле 12. Предлагаемое устройство предназначено для упргшления раздаточной тележкой, загружаемой в исходном положении мерной порцией мелкоштучного сыпучего полуфабриката с последующей
транспортировкой и разгрузкой на ход в приемное устройство той технологичкой линии, с которой последовал вызо после чего тележка автоматически реверсируется, возвращается в исходное положение и становится под повторую загрузку полуфабрикатом.
Устройство для дистанционного упрления реверсивным механизмом работает следующим образом.
При подаче на схему устройства пиющего напряжения через ограничивающий 36, регулировочный 37 резисторы и диод 38 начинает заряжаться конденсатор 39. По достижении на нем определенного уровня напряжения срабатывает реле 40 и своими замыкающимися контактами 40.1 обеспечивает разряд конденсатора, а 40.2, подает напряжение на катушку шагового искателя 17, тем самым осуществляется передвижение на шаг контактов искателя. По мере разряда конденсатора напряжение на катушке реле 40 снижается и оно отпадает, далее процесс заряда конденсатора повторяется. Величины элементов 36, 37,39 и 40 выбраны таким образом,чтобы обеспечить надежную работу всех аппаратов схемы как во время импульсов, так и во время пауз между НИМИ; Предположим, что необходимо произвести загрузку порцией заготовок второй автоматической линии, расположенной слева от исходного положения тележки.
При нажатии на кнопку 2 вызова второй линии слева на управляющий электрод тиристора 15 через резистор 16 подается управляющий сигнал,тиристор отпирается и удерживается во включенном состоянии током, протекающим через него, величина которого определяется соответствующим ограничивающим резистором 14. Тем самым обеспечивается запоминание произведенной команды вызова.
При замыкании контакт-а 17.3 шагового искателя 17 опроса линий через включенный тиристор 15 получает питание реле 8 вызова, которое через свой контакт 8.1 становится на самопитание, одновременно шунтируя тиристор 15 и тем Сс1мым выключая его контакт 8.2 обеспечивает подготовку к включению реле 26 управления реверсом, 8.3 - подготовку к включению реле 28 управления переключением скорости движения тележки, 8.4 подает напряжение питания на катушку промежуточного реле 34 управления вызовом влево.
Реле 34 своим разомкнувшимся Контактом 34.1 разрывает цепь питания катушки шагового искателя 17, тем самым исключая его дальнейшее движение и опрос следующих линий.
Контакт 34.2 подает напряжение питания на катушку магнитного пускателя 41, включаницего привод тележки на большую скорость движения влево. Тележка на транспортной скорости движения до датчика 19 положения первой линии слева.
При взаимодействии флажка тележки с датчиком 19 положения он срабатывает и через его нагрузочный выход второй разделительный диод 27 и замкнувшийся контакт реле 8.3 вызова подается напряжение на катушке реле 28 управления скоростью привода тележки
Разомкнувшийся контакт 28.8 обестчивает катушку магнитного пускателя 41,а замкнувшийся контакт 28.2 подае напряжение на катушку магнитного пускателя 42, обеспечивающего включени привода тележки на медленную скорост движения влево.
Пускатель 42 своим зсомкнувшимся контактом 42.1 становится на самопитние, а размыкающими контактами 42.2 и 42.3 блокирует включение катушек магнитных пускателей 41 и 31.
Тележка на медленной скорости двигается от первой линии ко второй. Пр подходе к приемному устройству второй линии происходит автоматическая разгрузка тележки, а при последующем взаимодействии флажка тележки с датчиком 20 положения через его нагрузочный выход, первый разделительный диод 25 и замкнувшийся контакт 8.2 реле вызова подается напряжение на катушку реле 26 управления реверсом привода тележки.
Реле 26 размыкающимся контактом 26.1 обесточивает цепь питания катушки магнитного пускателя 42, а замкнувшимся контактом 26.2 подает напряжение на катушку пускателя 31.
Пускатель 31 замкнувшимся контактом 31.4 становится на самопитание и обеспечивает реверс привода .тележки.
При подходе тележки к датчику 1Я исходного положения последний срабатывает, и через его нагрузочный выход первый разделительный диод 25 .замкнувшийся контакт 31.4 подается напряжение на катушку реле 33. Реле 33, получив питание, своим размыкающимся контактом 33.1 обесточивает катушку магнитного пускателя 31, привод тележки откалючается, и она останавливается в исходном положении, где сразу же автоматически загружается новой порцией заготовок, а контактом 33.3 снимается напряжение питания с общейшины шагового искателя 17, следовательно, реле 8 вызова теряет питание.
Реле 8 своим разомкнувшимся контактом 8.1 снимается с самопитания, а 8.4 отключает промежуточное реле 34 вызова слева, которое своим контактом 34,1 подготавливает цепь питания катушки шагового искателя 17. Пускатель 31, отключившись-, своим контактом 31.4 снимает напряжение питания с реле 33 управления. Отключившись, реле 33 своим контактом 33.3 вновь восстанавливает питание на общей шине шагового искателя 17. При очередном срабатывании реле 40 шаговый искатель 17 продвинется на один шаг, производя опрос второй линии справа, и в случае наличия вызова начнется его исполнение аналогично описанному вьлше, только в работе будут участвовать соответствующие реле 29, 30 и 35 и магнитные пускатели 32, 43 и 44. В случае вызова тележки для загрузки первой линии слева сразу же через нагрузочный выход датчика 18 исходного положения второй разделительный диод 27 и замыкающийся контакт 7.3 реле вызова к первой линии слева получит питание катушки реле 28 управления скоростью, и тележка будет двигаться от исходного положения на медленной скорости. Аналогично работает схема и при вызове перво линии справаj только в работе участвуют контакт 10.3 реле 10 вызова пер вой линии справа и реле 30 управлени скоростью. При одновременном поступлении команд на загрузку сразу всех шести линий последовательность их исполнения определяется порядком подключения реле вызовов с контактом шагового искателя по ходу его движения. При отсутствии сигналов вызова шаговый искатель 17 с каждым включением реле 40 продвигается на .один ш тем самым производя последовательны опрос всех линий. Схемное решение устройства позво ет обеспечить обслуживание любого к личества линий применяя в каждом к кретном случае соответствующий шаго вый искатель. Предлагаемое устройство предназн чено обслуживать несколько автомати ческих линий, осуществляющих опреде ленные технологические операции обр ботки полуфабриката, расположенных ряд. При этом исходное положение тележк выбрано посередине между линиями, а движение ее по вызову обеспечиваетс как влево, так и вправо от сходног положения, что значительно сокращае время нахождения тележки в пути, OC бенно к отдаленным линиям, что позволяет быстрее удовлетворять запросы, идущие с линий, и тем самым повысить производительность труда. Запоминание сигнала вызова позвояет упростить работу обслуживающего персонала линий (наладчика, оператора) , улучшить условия труда, сделать их более комфортабельными. Эффективность использования предагаемого устройства для дистанционного управления, реверсивным механизом, обеспечивается не только за счет высвобождения определенного числа рабочих, занятых загрузкой линий заготовками вручную, но и за счет повышения производительности, улучшения условий труда, а также повышения надежности всей системы в целом. Формула изобретения 1.Устройство для дистанционного управления реверсивным -механизмом по авт.св. № 875348, от.пичающ е е с я тем, что, с целью расширения области применения -устройства, оно содержит шаговый искатель и ячейки памяти, причем первый вывод обмотки каждого реле вызова линии через соответствующий онтакт шагового искателя подключен к одному полюсу источника питания, второй вывод обмотки каждого реле вызова линии подключен к первому выводу соответствующей ячейки памяти, через свой замыкающий контакт - ко второму полюсу источника питания и ко второму выводу ячейки памяти, третий вывод которой соединен с первым полюсом источника питания, а четвертый вы.вод через соответствующую кнопку вызова - с первым полюсом источника питания. 2.Устройство по П.1, о т л и чающееся тем, что ячейка памяти выполнена в виде последовательно соединенных резистйвного элемента и тиристора, причем точка соединения первого вывода резистйвного элемента и анода тиристора подключена к первому выводу ячейки памяти, второй вывод резистйвного элемента подключен к третьему выводу ячейки памяти, второй вывод которой соединен с катодом тиристора,-а четвертый вывод - с управляющим входом тиристора. Источники информации, принятые во внимание при Э1 спертизе 1. Авторское свидетельство СССР W875348,, кл. G 05 D 3/00, 1980 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
| Устройство для дистанционного управления раздаточной тележкой | 1982 |
|
SU1174905A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1024882A2 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU875348A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для многоточечной сигнализации | 1988 |
|
SU1711212A1 |
| Устройство для аварийной сигнализации | 1984 |
|
SU1233196A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1475874A1 |